










转载知乎 多相交错并联Boost电路建模与Simulink仿真
一、概况
本次建模与仿真基于某实际氢燃料电池项目,额定功率180kW。
采用非同步整流Boost拓扑,多相交错并联结构,以有效减小输入端电流纹波。具体拓扑无输入电流(即电堆电流)采样,交错的8相均有电感电流采样。无源器件的选型以实际项目为准,单相电感选型为90uH (额定工况),输出电容选型为200uF,输入X电容为2uF,额定输入电压225V(以单片400W功率的电堆,需375片,取单片电压0.6V为额定电压),额定输出电压650V,功率180kW(仿真模型不折合效率,功率保持和输入一致,阻性负载即R=2.82ohm),该功率下电感感值大概为90uH,以下是部分理论数据计算:
额定工况时,理论占空比

每路电感电流纹波峰峰值

数字环路设计采用平均电流控制,可以有效抑制电堆电流纹波,这也是燃料电池DC/DC普遍的控制方式。为了实现电感电流软件均流,每一相使用独立的电感平均电流控制内环,多相共用电压外环。
二、数学建模
目前电源建模方法主要有数学计算和AC扫频两种方法。其中AC扫频方法既可以在实际系统台架上利用频响分析仪得到系统的Bode图,也可以在Simulink上搭建系统模型并使用Simulink Control Design进行扫频得到系统Bode图或者传递函数。
由于Boost电路较为简单,数学建模相对容易,本设计使用数学建模方法计算DC/DC传函,然后利用Simulink Control Design进行PI参数自动整定。
1.大信号方程
根据基尔霍夫KCL、KVL定律可以得到开关管开通和关断时的大信号时变方程,
开通时:

关断时:

令T为开关周期,d(t)为占空比,<>T为开关周期平均算子。状态平均化后得到开关周期内的电感、电容非时变方程为:

2.小信号扰动
假设在直流工作点附件存在交流小信号扰动,即:
令直流项为0,忽略二阶项则可以得到小信号扰动下Boost变换器的平均数学模型,即非时变线性方程:

此外,稳态时:

这样便可以求解传递函数啦。
3.传递函数
小信号扰动平均后,进行拉普拉斯变换或者状态空间方程求解可以得到电流内环传递函数:

电压对电感电流的传递函数为:

带入额定工况参数,分别得内外环的传递函数为(传递函数的计算可以编写matlab脚本得到):

4.补偿器设计
本项目使用PI补偿器对系统进行闭环控制(进阶优化可以考虑使用2P2Z或3P3Z数字补偿器,相对于PI补偿器只有一个不可调的0极点和一个可调零点,2P2Z补偿器多了一个可调极点和一个可调零点,3P3Z补偿器多了两个可调极点和两个可调零点,可以灵活调节中频段的幅值和相位)。
PI参数整定可以使用Simulink、TI、Microchip等提供的整定工具,Simulink PI补偿器模块自带参数整定工具PID Tuner,较为方便。本设计暂不考虑z域采样延时,输出延时,以及采样和PWM输出量化误差,在s域进行初步整定,实际系统调试时再做微调。PI补偿器结构为 kp+ki/s,数字环路反馈使用AD值,电压增益选取4096/1000,电流增益选取4096/200,即电压电流量程分别为1000V和单向200A,与实际系统相符。
使用Simulink PID Tuner对传递函数的PI补偿器设计:
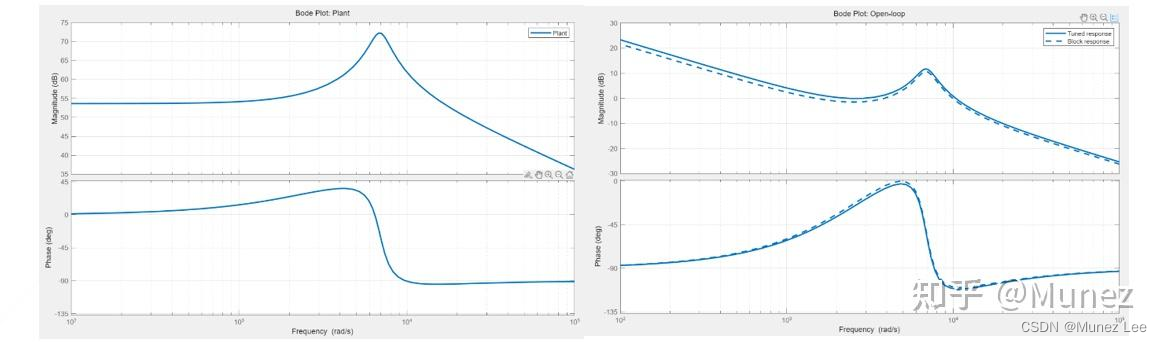
电流内环补偿前后Bode图
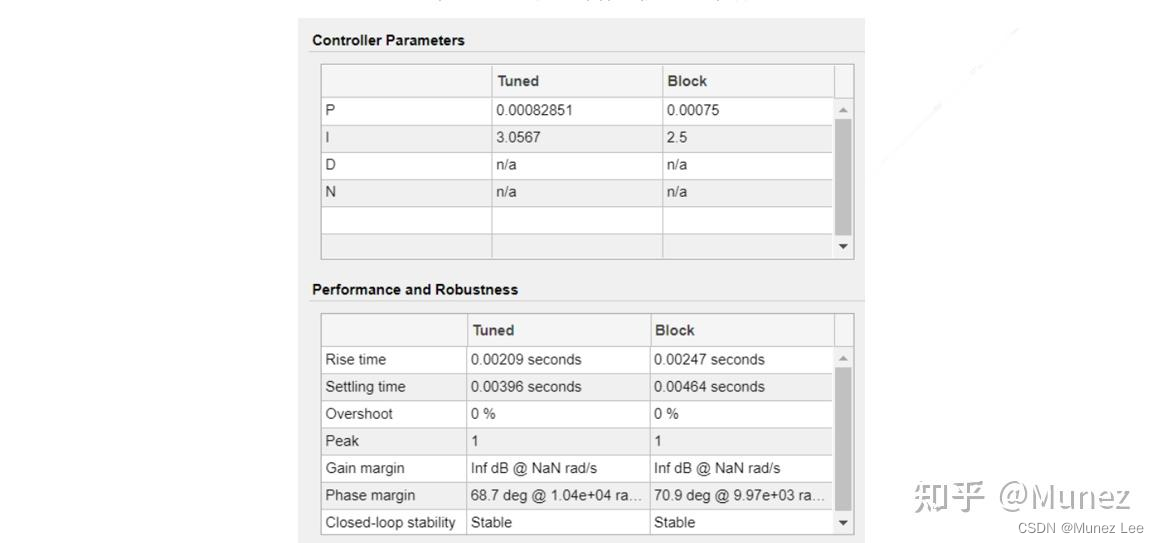
电流内环补偿器PI参数
整定得,穿越频率10.4k rad/s,即1.66kHz。相位裕度68.7度,增益裕度无穷大。kp 为0.00083,ki为3.06。Simulink仿真时使用AD值参与运算,且输出结果拟12位数字PWM,所以仿真以及数字实现时kp 和ki应乘以4096/(4096/200)=200。
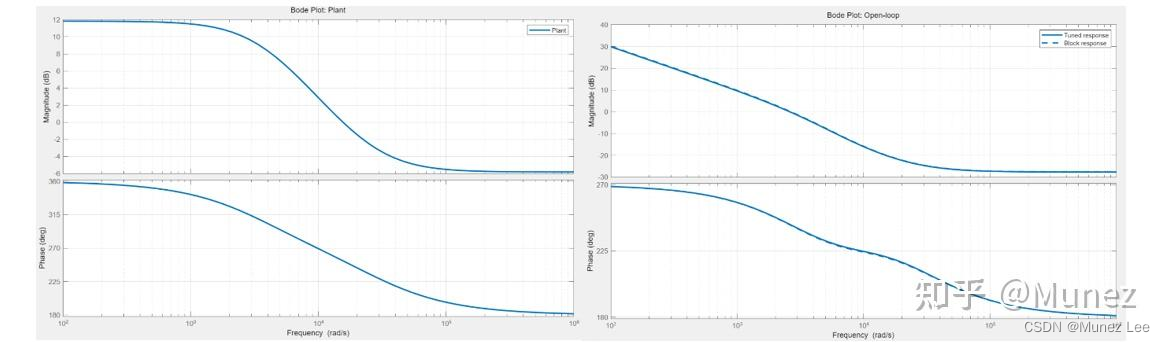
电压外环补偿前后Bode图

电压外环补偿器PI参数
整定得,电压外环穿越频率2.61k rad/s,即415 Hz。相位裕度63度,增益裕度27.6dB。kp等于0.0814,ki等于799,仿真以及数字实现时kp和ki应除以采样放大系数。
三、Simulink仿真
1.Simulink模型
搭建的8相交错并联Boost平均电流控制方案Simulink模型如下图所示,模型包括Boost功率拓扑,ADC采样模块,补偿器和PWM发生器。本次仿真只针对DC/DC本身性能,不包含燃料电池系统,所以输出端不并接锂电。
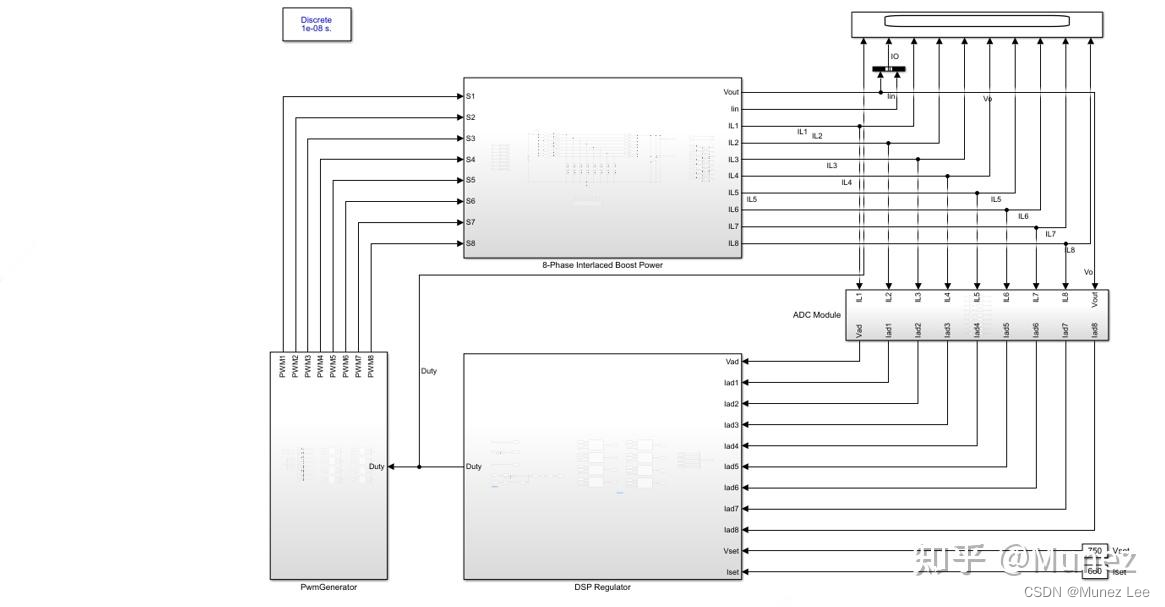
180kW8相交错并联Boost电路Simulink仿真模型
PWM发生器仿照C2000 ePWM外设,采用中央对齐方式输出PWM信号,8相交错相位45°,并且每相在计数值达到TBPRD时输出高电平信号作为各相平均电流采样信号;Boost功率模块为8相交错并联,非同步整流输出结构,根据PWM发生器的平均电流采样信号,输出并保持电感平均电流;ADC采样模块将数字量转换为12位ADC结果,增益与实际系统相符;DSP Regulator模块为环路补偿器,有1个电压外环和8个电感电流内环,控制器参数需用上述参数。
2.仿真波形
某工况下电感电流交错波形如下:
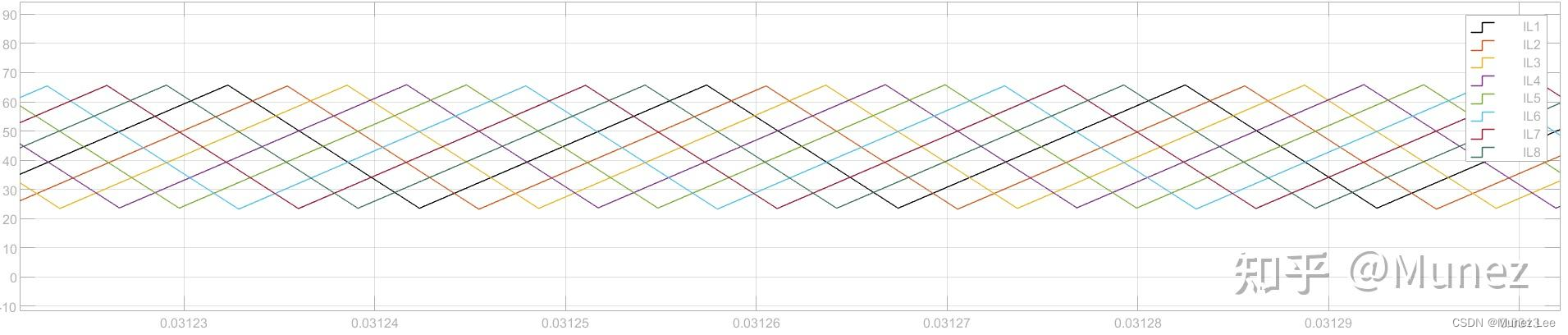
8相交错电感电流波形
目标输出电压设定为750V,输入电流设定为660A,输入电压设定为225V,负载电阻为2.82Ω。
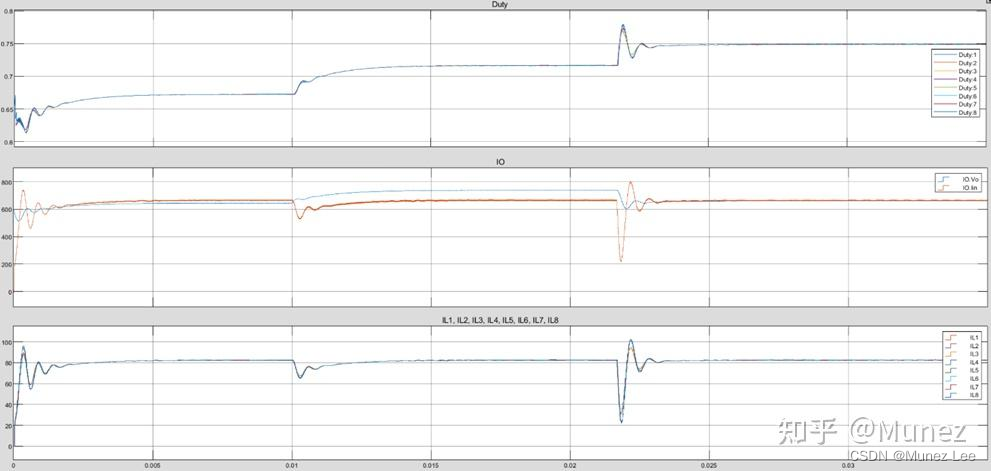
额定工况稳态工作波形( d、Vo、Iin、IL1-8平均电流)
启动过程:系统稳定时间测量约为3.6ms,考虑到前期电压外环结果限制了爬升速度,实际稳定时间应该更快,这与补偿器设计一致;
负载扰动:在0.01s处将负载电阻阶跃切换至3.7Ω,约3.23ms后系统重新达到稳态,占空比输出由6.672调整为0.715,输入电流纹波由5.6A变为8.5A,即由0.85%变为1.29%,略有增大;
输入扰动:在0.021s左右将输入电压阶跃切换至180V,约1.72ms后系统重新达到稳态,占空比由0.715调整为0.749,输入电流纹波由8.5A变为5.8A,即由1.29%变为0.88%,略有减小。
由上可见补偿后系统电流环对25%左右的负载阶跃扰动以及25%的输入电压阶跃扰动的动态响应速度快、稳态精度高,高频纹波最大未超过1.5%,所以当前PI参数可以作为连续域的参数转换到初版代码数字离散补偿器中。具体PI参数以实际台架调试为准。
作者:拓华技术——Munez
联系方式: muzzilee@163.com
喜欢此篇文章的大小朋友,欢迎赞同、评论、收藏、分享支持小编~转载请注明来源















 425
425

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









