









 本文详细介绍了如何在机器人控制器上进行系统变量和IP地址的设置,包括$KAREL_ENB的更改以及如何配置Server,如选择TCP/IP协议、指定ServerIP和Port号。最后强调了重启控制器以使设置生效。
本文详细介绍了如何在机器人控制器上进行系统变量和IP地址的设置,包括$KAREL_ENB的更改以及如何配置Server,如选择TCP/IP协议、指定ServerIP和Port号。最后强调了重启控制器以使设置生效。
一、机器人设定
1.系统变量设定
正常使用本软件,请按如下步骤更改系统变量:
(1) 按 MENU 键
(2) 选择 0--NEXT--
(3) 选择 6 SYSTEM
(4) 按 F1【TYPE】
(5) 选择 Variables, 找到系统变量$KAREL_ENB, 更改其值为 1。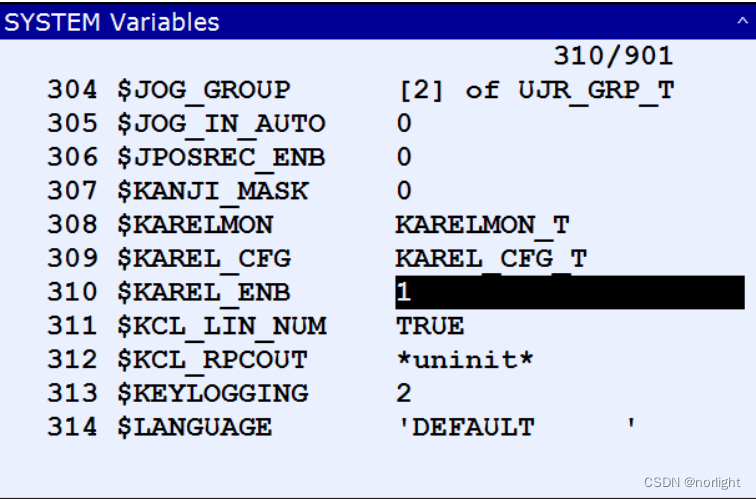
2.IP地址设定
在机器人控制器上设置机器人的 IP 地址:
( 1) 按 MENU 键
( 2) 选择 SETUP
( 3) 按 F1【 TYPE】
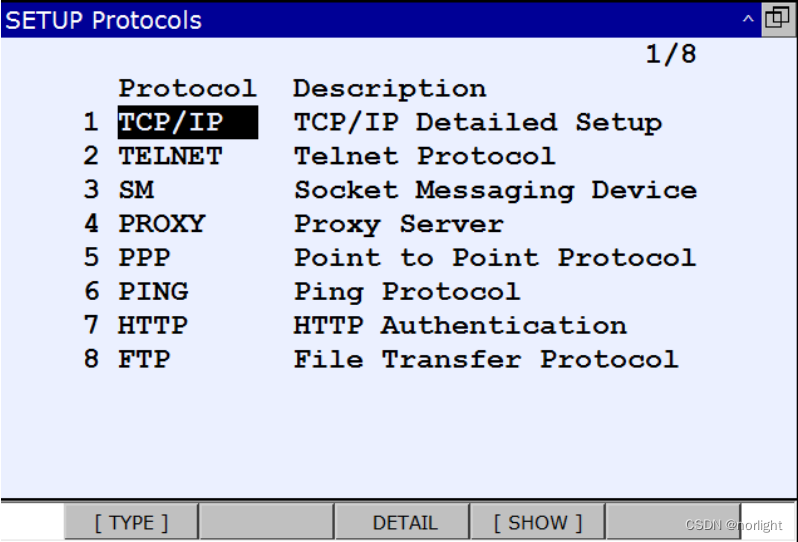
( 4) 选择 Host Comm,进入如下界面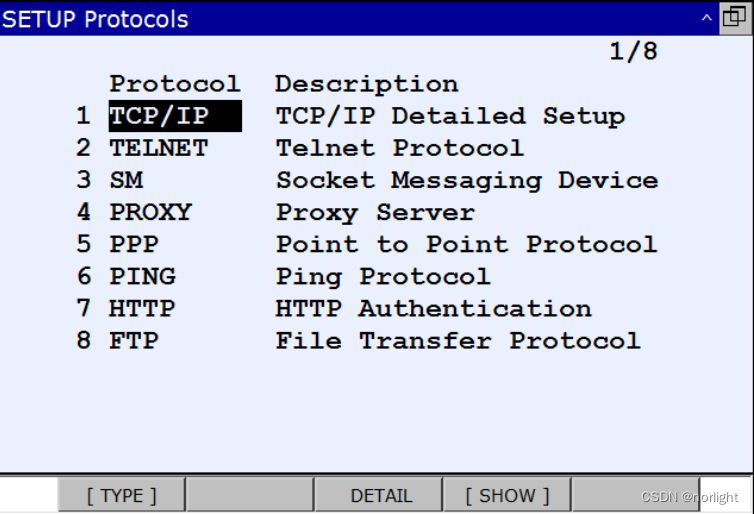
选择 TCP/IP,按 Enter 键或 F3【 DETAIL】键,进入: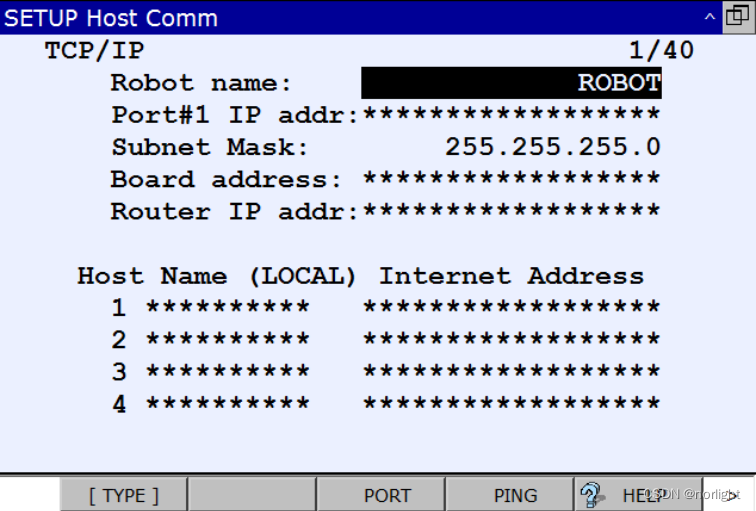
在 Port#1 IP addr 所在行输入机器人的 IP 地址,例如 192.168.0.1。上位机的
IP 地址和机器人的 IP 地址需在同一网段,例如上位机 IP 地址可设为 192.168.0.2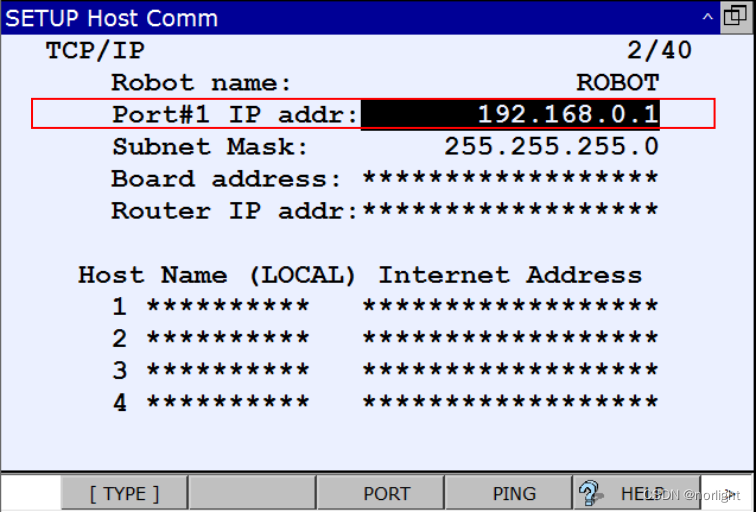
设置完成后,重启机器人控制器,以使其生效。
二、Server设定
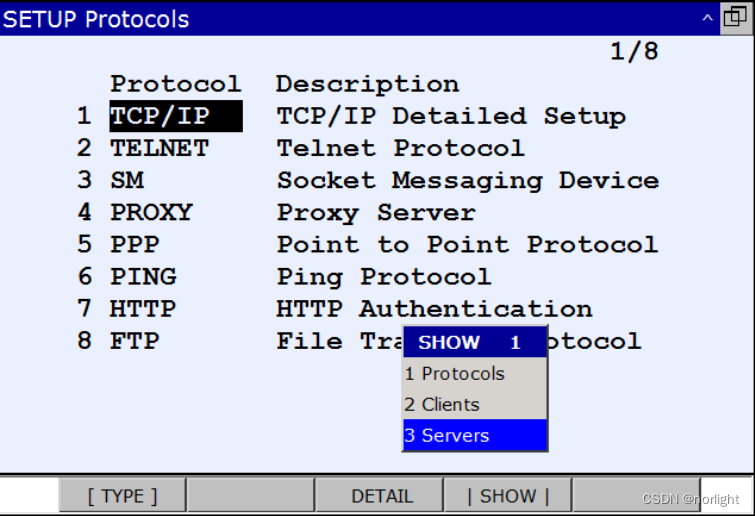
重启后。仍进入以下界面:
1.按 F4【 SHOW】,并选择 Servers(机器人将作为 Server,上位机作为 Client):
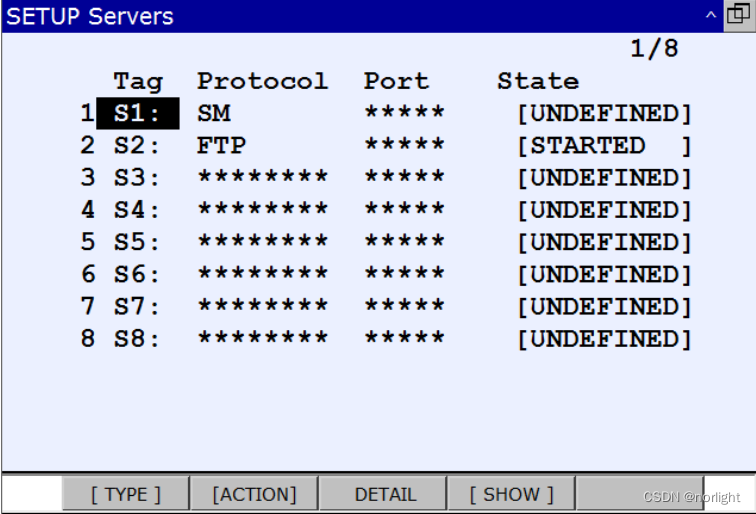
选择 Tag 标签号,这里以 S3 为例,按 Enter 或 F3【DETAIL】进入: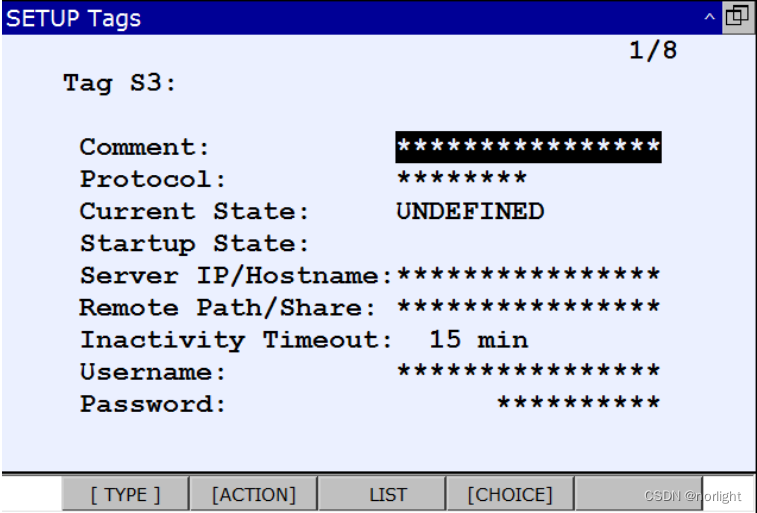
在 Protocol 处,按 F4【CHOICE】,并选择 SM: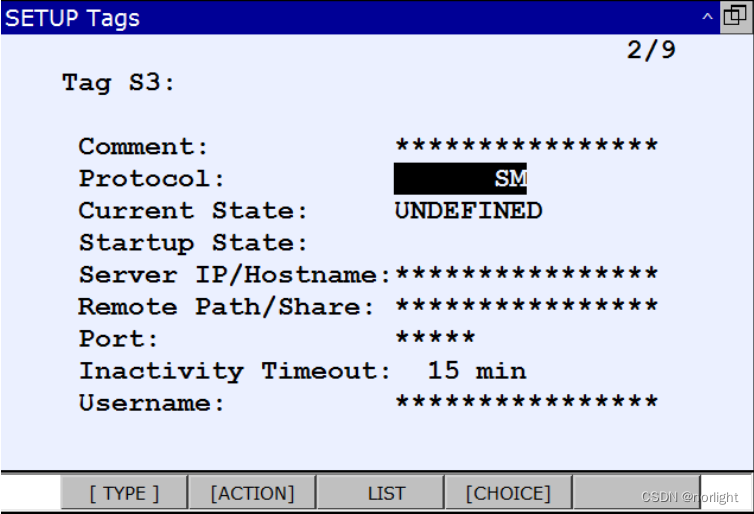
在 Startup State 处,按 F4【CHOICE】,并选择 START: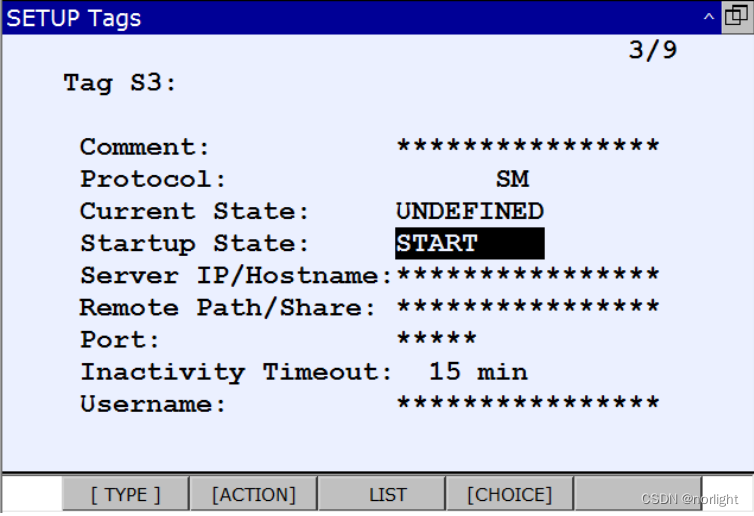
在 Server IP/Hostname 处,按 Enter,输入上位机的 IP 地址: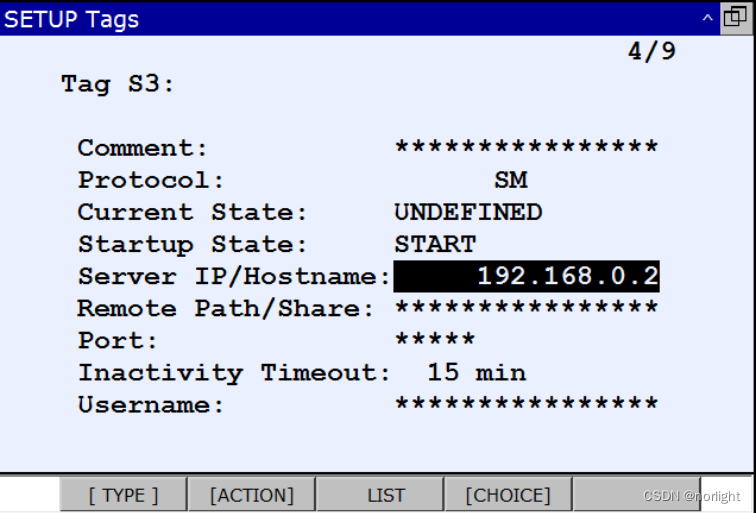
按 F2【ACTION】,并选择 DEFINE,界面会变成: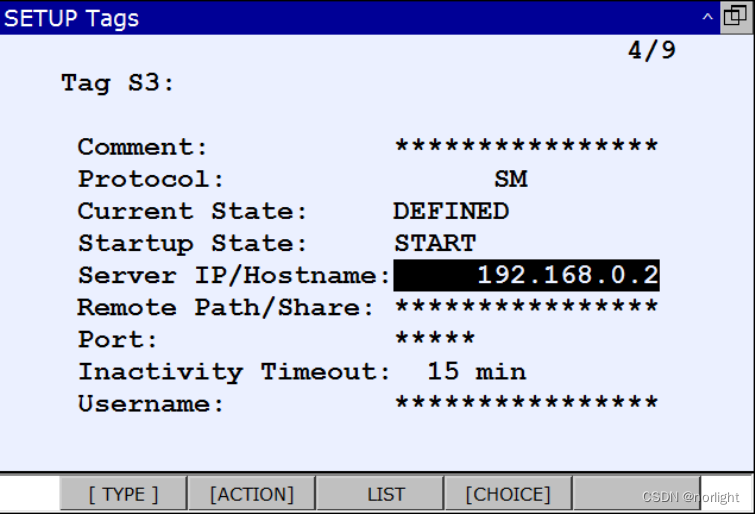
再按 F2【ACTION】,并选择 START,界面会变成: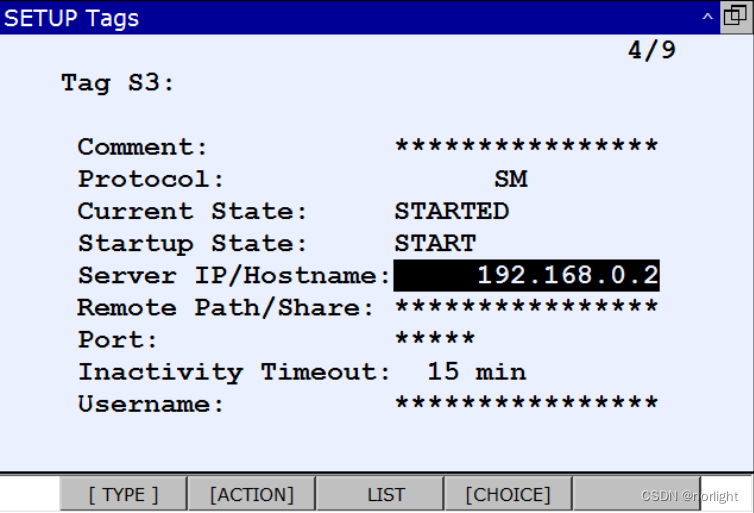
2.【关于 Port 号的设定】
( 1) 按 MENU 键
( 2) 选择 NEXT
( 3) 选择 SYSTEM
( 4) 按 F1【 TYPE】
( 5) 选择 Variables, 并找到$HOSTS_CFG:
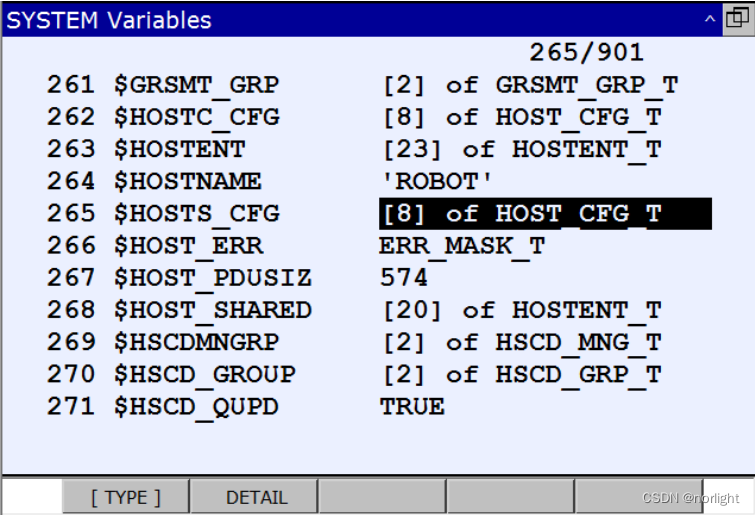
【注意】不要选择$HOSTC_CFG。
在$HOSTS_CFG 所在行按 Enter 或 F2【DETAIL】,进入: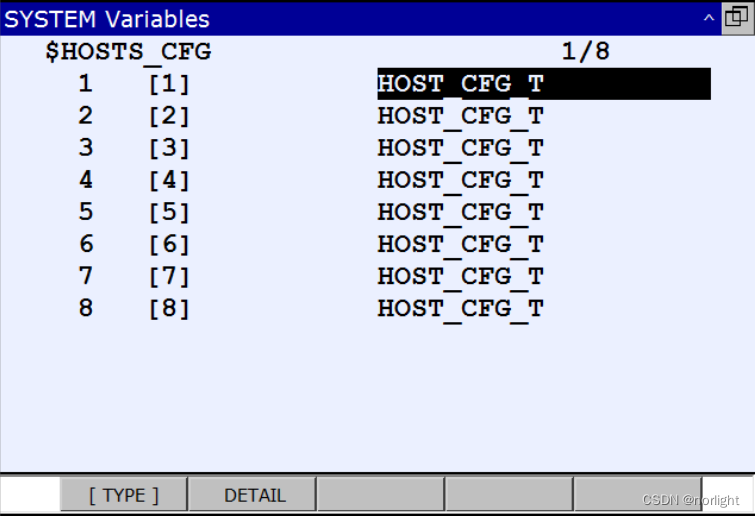
由于前面的设定中选择了 S3,故这里进入第三行: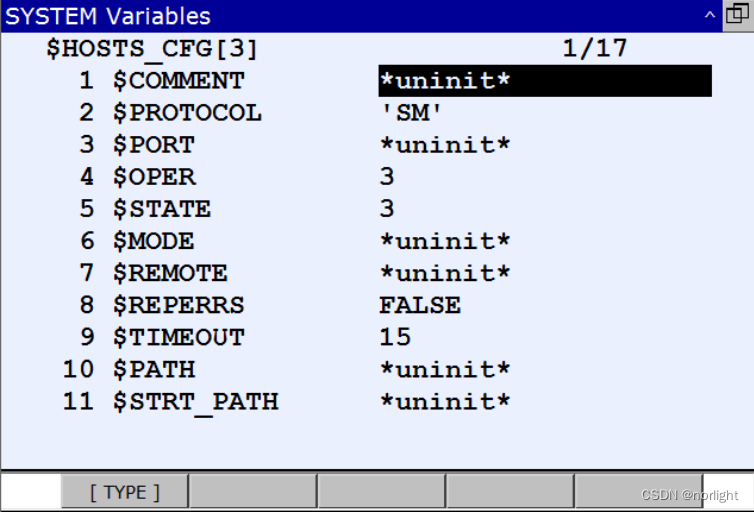
往下翻,找到$SERVER_PORT,输入 PORT 号,例如 8601: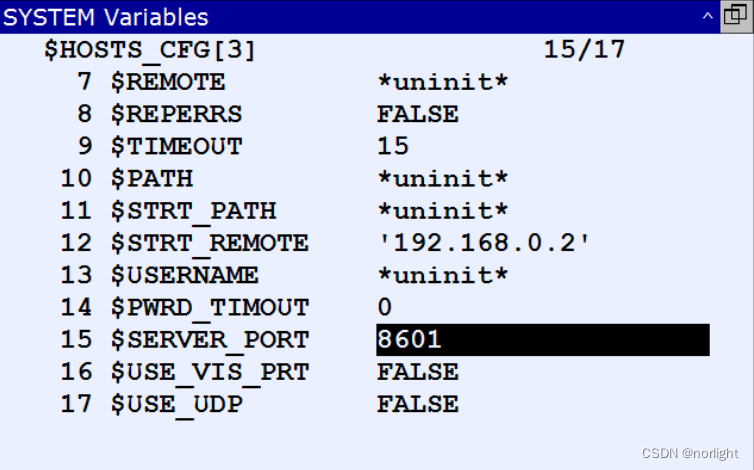
【注意】 此 PORT 号由上位机指定。
完成设定后,重启机器人控制器。


















 518
518

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











