







引言
红外成像技术具有被动工作、抗干扰性强、全天候工作等特点,已被广泛用于军事侦察、监视和制导方面。但由于地物、植被等背景往往具有与目标相当的辐射强度和辐射纹理,特别是随着光电对抗技术的发展,各种红外伪装措施尤其是红外迷彩技术的应用,使目标和背景的辐射特性发生变化,目标的红外热特征产生歪曲,严重影响红外成像探测系统的目标探测能力,因此,如何从复杂和伪装物辐射中有效地探测和识别目标成为国内外迫切需要解决的问题,新的红外探测技术成为研究探索的主要方向之一。
实验表明: 由于物体反射和电磁辐射的过程中都会产生由自身性质决定的偏振特性,不同物体或同一物体的不同状态(如粗糙度、含水量、材料理化特性特征等)在热红外波段往往具有不同的偏振状态,利用目标表明辐射或反射偏振信息的红外偏振成像技术,可以综合获得目标的强度、偏振和图像等多维特征信息,有效提高目标与背景的对比度,突出目标的细节特征,增强目标识别效果,更全面、深入地了解目标的属性和行为;自然物和人造物之间存在明显的红外偏振特性差异,这些差异可以构成目标探测的新信息。
正文
1 偏振基本原理
自然界中,光滑的植物叶片、江河湖海的水面、冰雪、沙漠、云等物体都充当着天然反射起偏器的作用。自然光照射后,反射光中电矢量垂直分量和平行分量的振幅发生了变化,因此,反射光不再是各向同性的自然光,而成为部分偏振光或线偏振光,根据光波偏振态的变化可以反演被探测目标的纹理结构、表面状态和材料类型等。
1.1 基本概念与定律
首先明确光是电磁波,而电磁波是一种横波,即其振动方向与传播方向垂直。在研究中,通常以其电场 E E 来表征光的震动方向。若电场 被限制在某一些方向上震动,称为光的偏振化,电场振动方向称为光的偏振方向。

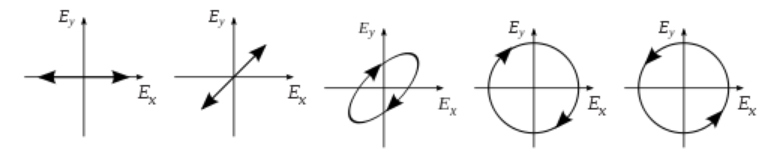
沿 z 方向传播的波动方程的通解可表示为沿 x、y 方向振动的两个独立场分量的线性组合,即 E=xiE+yjE E = x i E + y j E ,其中 Ex=E0xcos(ωt-kz+ϕx) E x = E 0 x c o s ( ω t - k z + ϕ x ) 、 Ey=E0ycos(ωt-kz+ϕy) E y = E 0 y c o s ( ω t - k z + ϕ y ) 表示传播方向相同、振动方向相互垂直、有固定相位差的两束线偏振光。 根据空间任一点光电场 E E 的向量末端在不同时刻的轨迹不同,可分为线偏振光(linearly polarized)、圆偏振光 (circle polarized)、椭圆偏振光(elliptic polarized),如下图所示。
所谓偏振光,就是光在传播过程中,光矢量的方向和大小有规则的变化的光。光矢量的方向不变,其大小随相位变化的光是线偏振光,这时在垂直于传播方向的平面上,光矢量端点的轨迹是一直线。而圆偏振光在传播过程中其光矢量的大小不变,方向则变化,其端点的轨迹是一个圆的偏振光。椭圆偏振光是指光矢量的大小方向在传播过程中均规则变化,光矢量端点沿椭圆轨迹转动的偏振光。
1.2 偏振光的数学表示
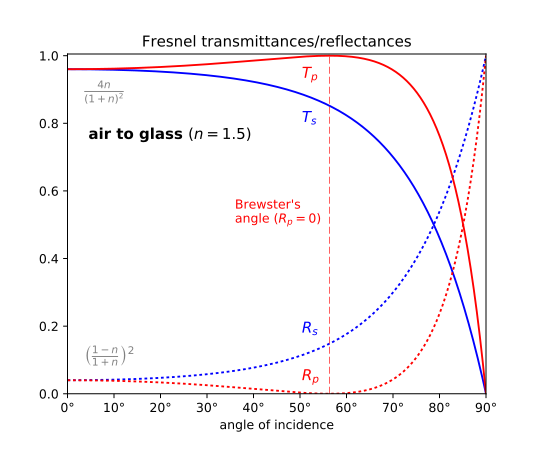
基于菲涅尔公式,可知反射和折射的 s波和 p波的振幅系数与入射角的关系。如果以某一特定角度入射(布儒斯特角),反射光波(R)会出现完全偏振光,这就是偏振光产生的原因。
假定平面电磁波沿 轴方向传播,电场分量只有
x,y
x
,
y
方向的分量,不是一般性,平面波取如下形式:
其中 τ=ωt−kz τ = ω t − k z , 写成分量形式:
上式可写为:
其中 δ=δ2−δ1 δ = δ 2 − δ 1 .
用复数形式表示,则可写成:
且有:
线偏振光:当 δ=mπ (m=0,±1,±2,...) δ = m π ( m = 0 , ± 1 , ± 2 , . . . ) :
EyEx=(−1)mE0yE0x E y E x = ( − 1 ) m E 0 y E 0 x右旋圆偏振光:当 δ=π2+2mπ (m=0,±1,±2,...) , E0x=E0y δ = π 2 + 2 m π ( m = 0 , ± 1 , ± 2 , . . . ) , E 0 x = E 0 y :
EyEx=eiδ=i E y E x = e i δ = i左旋圆偏振光:当 δ=−π2+2mπ (m=0,±1,±2,...) , E0x=E0y δ = − π 2 + 2 m π ( m = 0 , ± 1 , ± 2 , . . . ) , E 0 x = E 0 y :
EyEx=eiδ=−i E y E x = e i δ = − i其余情况下为椭圆偏振光。
1.3 Jones表示方法
两振动方向相互垂直的偏振光叠加时,一般将形成椭圆偏振光。两偏振光振幅比 E0x/E0y E 0 x / E 0 y 及其相位差 δ δ 决定了椭圆的长、短轴之比及其空间的取向。这表明只需两个特征参量:两偏振光振幅比 E0x/E0y E 0 x / E 0 y 及其相位差 δ δ 就可以表示任一光波的偏振态。
略去系数 eiδ1 e i δ 1 ,偏振光可以表示为琼斯矢量:
琼斯矩阵法是作用于上面的琼斯向量而提出的,这些矩阵由各种光学元件实现,例如透镜,分束器,反射镜等。每个矩阵表示投影到琼斯向量的一维复数子空间上。
偏振光 –> 偏振器件 –> 另一偏振光
- 偏振器件在偏振态转换中起着线性变换作用。
- 新的偏振态的两个分量是原来偏振态两分量的线性组合。
| 光学元件 | 对应的琼斯矩阵 |
|---|---|
| Linear polarizer with axis of transmission horizontal[1] | (1000) ( 1 0 0 0 ) |
| Linear polarizer with axis of transmission vertical[1] | (0001) ( 0 0 0 1 ) |
| Linear polarizer with axis of transmission at ±45° with the horizontal[1] | 12(1±1±11) 1 2 ( 1 ± 1 ± 1 1 ) |
| Right circular polarizer[1] | 12(1−ii1) 1 2 ( 1 i − i 1 ) |
| Left circular polarizer[1] | 12(1i−i1) 1 2 ( 1 − i i 1 ) |
琼斯微积分仅适用于已经完全偏振的光。 随机偏振,部分偏振或不相干的光必须使用米勒微积分进行处理。
1.4 Stokes表示方法
1852年,Stokes提出用4个Stokes参量来描述光波的偏振态和强度,这4个Stokes参量都是光强的时间平均,组成一个4维的数学矢量,斯托克斯参数S 0,S 1,S 2,S 3与强度和偏振椭圆参数的关系如下面的等式和下图所示。

这里
I,p,2ψ,2χ
I
,
p
,
2
ψ
,
2
χ
是笛卡尔坐标的三维向量的球面坐标
(S1,S2,S3)
(
S
1
,
S
2
,
S
3
)
。
I
I
是光电总强度,而 是偏振度。如果给定斯托克斯参数,可以用下列方程求解球坐标:

通常将这4个参量写成矩阵形式,也就是常说的Stokes矢量
S=⎡⎣⎢⎢⎢S0S1S2S3⎤⎦⎥⎥⎥
S
=
[
S
0
S
1
S
2
S
3
]
被 Stokes 描述的光可以是完全偏振光、部分偏振光和完全非偏振光;由于 Stokes 矢量与光强成正比,具有强度量纲,可以直接被探测器探测。Stokes 参量中的
S0
S
0
与入射光强有关;
S1
S
1
与0°和90°方向的线偏振信息有关;
S2
S
2
与45°和135°方向的线偏振信息有关;
S3
S
3
与左/右旋的圆偏振信息有关,因此,可以直接测量不同偏振方向的图像计算 Stokes 矢量。
在偏振光学中,光学元件的传输矩阵既可用 2×2 琼斯矩阵来表示,也可以用 4×3 的 Muller 矩阵来表示,因此,存在所谓的琼斯矩阵和 Muller 矩阵法两种分析偏振广德解析方法; 琼斯矩阵用琼斯矢量进行运算,而琼斯矩阵与电场的振幅及相位相关; Muller 矩阵用 Stokes 矢量进行计算,而 Stokes 矢量与光强成正比。两种解析方法之间的差异决定了它们的应用场合:涉及部分偏振光问题时,应采用 Muller 矩阵法,在偏振光发生干涉时,选用琼斯矩阵法则更有效。在偏振成像探测中,由于 Stokes 矢量与光强成正比,故常选用 Stokes 矢量法描述光波的偏振态。
Muller 法:Muller 矩阵用来描述光波的偏振态传输。对于任意线性光学系统,假设其输入广德 Stokes 矢量是 Sin S i n ,输出光的 Stokes 矢量为 Sout S o u t ,当光束通过该线性系统,出射光的4个 Stokes 参数分别与入射光束的 Stokes 参数成线性函数关系,则该线性系统对光的作用可以通过一个 4×4 的矩阵表示,即 Sout=M×Sin S o u t = M × S i n ,矩阵形式为:
其中, M M 是系统的 Muller矩阵,表示这种物质的特性及取向,全面记录了光学系统对入射光偏振态的影响。式(1) 表明,当光束通过光学系统时,利用其 Stokes 矢量左乘系统 Muller 矩阵就可以得到输出光的 Stokes 矢量。当光束连续通过若干个子系统,而各个子系统的 Muller 矩阵分别是 时,出射 Stokes 矢量和入射 Stokes 矢量也存在类似的传递关系:
2 红外偏振成像
2.1微偏振阵列
常用的偏振器件按工作方式的不同可分为分步获取偏振特性的线偏振器件和同步获取偏振特性的焦平面偏振器件。随着 MEMS 技术的快速发展,通过将微偏振片、感光单元、处理单元加工到同一基片上,制成偏振焦平面,无需运动部件,可以有效地应用于各种载台。
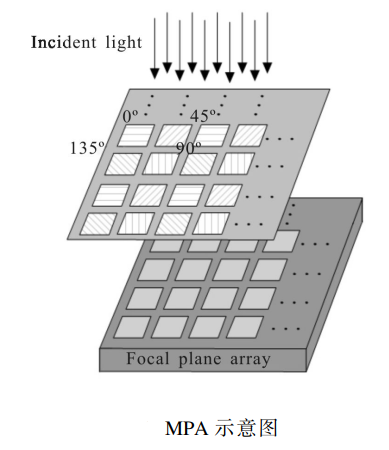
基于微偏振片阵列(MPA)的偏振成像设备在体积、重量、功耗等方面的优势,极大促进了偏 振成像的应用领域。偏振焦平面中各种角度微偏片的分布不同,相应的偏振焦平面也有一定差异。借鉴与彩色成像 RGB 三色原焦平面 R、G、B滤波片的排列方式,将不同角度的偏振焦平面微加工到焦平面上,对两个像素的近邻采用空间分布方式进行采样,并对每个像素的偏振信息进行处理,制成焦平面成像传感器,可以有效提高偏振信号的探测能力。MPA 的每 2×2 单元分别代表 0° 45° 90°和 135°透偏振方向。 MPA 集成在感光芯片上其单元大小与所要集成的感光 芯片的像素单元大小完全一致 并且 MPA 的单元与感光芯片像素单元需逐一对准。
利用这种 MPA 进行偏振成像探测的技术就是 MPA 成像技术。 这种偏振成像方式不存在分光元件 在理论上具有高透过率、高消光比、高实时性、高可 靠、高时间分辨率、低功耗等特点 是偏振成像技术的 发展趋势。 根据 MPA 制作工艺的不同 微偏振片成像 技术目前可大致分为三类 即基于高分子薄膜制造工 艺(PVA)、基于液晶材料和基于金属微纳光栅的微偏 振片成像技术。
2.2 偏振特性建模
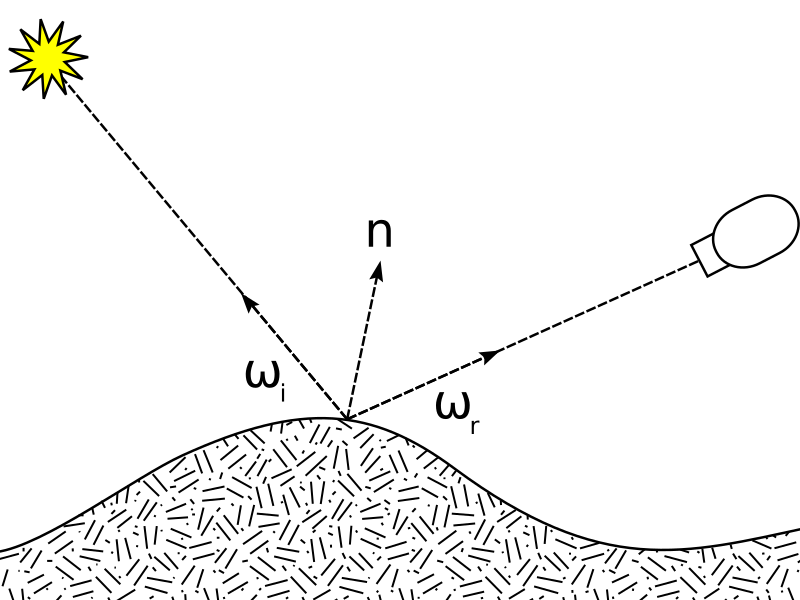
对于不透明的辐射目标,认为其表面的发射辐射主要由背景反射和自身辐射组成。讨论Stokes 矢量 Sin S i n 可表示为对太阳及天空背景的反射 Stokes 矢量 Sr S r 与其自身发射辐射的 Stokes 矢量 Se S e 之和,即 Sin=Sr+Se S i n = S r + S e .场景表面的反射Stokes 矢量与其场景表面的反射特性相关,这里需要通过双向反射分布函数(bidirectional reflectance distribution function, BRDF)来求解。
BRDF 的物理意义是指:入射到物体表面的给定方向辐射反射到某一方向产生的辐亮度,其与入射天顶角、入射方位角、探测方位角、探测天顶角及波长等因素相关。
光线照到一个物体,首先产生了反射,吸收和透射,所以BRDF的关键因素即为多少光被反射、吸收和透射(折射)了,是怎样变化的。这时的反射多为漫反射。而要知道这些光线反射透射的变化就需要清楚三样东西,物体的表面材质、光线的波长(即它是什么样的光,是可见太阳光,节能灯光还是紫外线)和观察者与物体之间的位置关系。三维世界角度可以类似是球体的,光线角度除了纵向180°的变化,还有横向360的不同发散方向。会有相应的入射光,反射光,入射角和反射角,它们在物体表面的法平面和切平面上的关系成为了BRDF的关键参数。由于人类眼睛对光的特殊敏感性,我们之所以能看到物体都是通过光线在物体上的发射和转移实现的。而双向反射分布这样的函数表示可以更好地描述光线在物体上的变化,反射光线同时发向分布在法线两边的观察者和光源两个方向,从而使人在计算机等模拟环境下,视觉上可以看到更好的物体模拟效果,仿佛真实的物体存在。
BRDF 之T-S 模型是基于镜面反射的微面元理论提出的,用高斯分布作为微面元的概率分布函数。描述反射的微面元理论可以简述为:如果样品表面粗糙度大于或等于入射辐射波长,则其可被看成是由一组微面元组成;微面元的法线分布满足某种概率分布,每个微面元的反射特性可近似看成是镜面反射。
BRDF 的偏振化过程是通过将标量的 BDRF 模型与 4×4 的菲涅尔反射 Muller 矩阵作用获得的。
待测物体表面宏观法线方向为z,待测表面由一系列微面元组成,每个微面元都具有唯一的法线方向 zu z u .
由电磁理论可知,入射辐射电场矢量 Ers、Erp E s r 、 E p r ,下角标 s 和 p 分别代表电场分量平行和垂直于探测面。为了表征该过程的电场分量,引入4个参考平面,分别为:入射方向与z组成的平面、探测方向与z组成的平面、入射方向与 zu z u 组成的平面、探测方向与 zu z u 组成的平面。 ηi、ηr η i 、 η r 为参考平面之间的旋转角,最终可将琼斯矩阵转换为 Muller 矩阵。
3 自然界中的偏振信息
3.1植被
在对植被偏振特性的研究中,大量的研究都集中在叶片上,叶片表面的镜面反射和漫反射同时发生,而偏振光是由镜面反射产生的。 研究结果表面植物叶片的偏振反射特征与本身的性质、测量波长、观测角度有很大的关系。为偏振光遥感、多角度遥感的深入研究提供了依据。
3.2 岩矿
研究发现光线入射角对岩石的反射、偏振反射影响很大。在空间水平方向,方位角对光谱具有极化特征,且也呈现椭圆分布规律。在空间垂直方向,竖直探测角随着光线入射角的不同而显著地影响着岩石的反射特征。解释了产生反射能量水平方向呈椭圆分布的机理,主要由岩石表面的镜面反射和漫反射的共同作用。
3.3 土壤
起初对土壤偏振反射特性的研究是在干燥土壤基础上开展的,发现各类干燥土壤具有朗伯体反射特征(漫反射)。改变光线入射天顶角、探测器天顶角和波段时,各类干燥土壤没有偏振反射特征。对含水土壤进行偏振研究,发现含水土壤表现出偏振反射特征,含水土壤的偏振度随着土壤湿度的增加而增加。
3.4 水体
经对水、油等平静液体表面的偏振反射特征进行研究,分析得到影响液体表面偏振反射的主要因素有液体的种类、波段、方位角、探测角以及光线入射角,通过对不同浓度LAS(直链烷基苯磺盐酸)、不同污染水体与水面溢油的多角度偏振反射测量得出偏振特性是水体的一个固有特征。
4 红外偏振成像技术
随着探测技术和传感器技术的发展,红外探测的精度和灵敏度越来越高,可以探测的目标温差越来越小,据资料显示,现在最先进的热像仪,其温度灵敏度已经达到了0.05℃。虽然探测的灵敏度提高了,但是,由于杂乱背景信号的限制,目标发现和识别的概率仍不是很高。比如,在目标物周围放置温度相同的噪声源,那么现有的红外热像仪就无法识别了。将偏振成像引入红外领域的目的就是为了解决这一问题。
由菲涅尔反射定律可知,当非偏振光束从光滑表面反射时会产生部分偏振光,而根据基尔霍夫理论,热辐射也会表现出偏振效应。所有地球表面和大气中的所有目标,在发射和反射电磁辐射的过程中,都会表现出由它们本身性质和辐射基本定律决定的偏振特性。不同物体或同一物体的不同状态(如粗糙度、含水量、构成材料的理化特征等)会产生不同的偏振状态,形成不同的偏振光谱。由于偏振信息是不同于辐射的另一种表征事物的信息,相同辐射的被测物体可能有不同的偏振强度,使用偏振手段可以在复杂背景下检测出有用信号,以成像方式显示出隐蔽军事目标。这种用红外成像系统加上偏振技术手段获取目标偏振信息,通过必要处理后进行显示的成像方式称为红外偏振成像。
当红外光倾斜入射到物体表面时,其偏振度较高;金属的偏振性要比绝缘体的偏振性显著很多;对于同一材料,其表面光滑度越高,其偏振度越高。
绿色植被的偏振度大约在0.5%;岩石、沙土的偏振度在0.5%\~1.5%;沥青混凝土公路的偏振度在1.7%\~3.4%;水面、海面的偏振度在1%\~2%。
实验结果表面:人造目标与自然背景表面状态差异能够引起较大的偏振度变化,人造目标比自然背景的偏振度高。
通过分析两者的强度对比度及偏振度对比度发现:用红外偏振成像探测可以在较低辐射强度对比度的情况下提高目标与背景的对比度,可以识别强度探测设备无法探测的目标;能够从杂乱的自然背景中凸显出人工目标的特征,增强对目标的探测和识别能力,可以有效地解决由于辐射强度对比度降低而无法对目标进行有效探测的难题。
4.1 偏振光的反射和辐射偏振特性
形状知觉是视觉系统对场景中各种空间关系的视觉感知结果,目标与背景的区分可以看成是理解形状知觉的基础。严格来讲,目标与背景并没有很清楚的界线,对于同一幅图像,按照不同的划分标准,目标和背景区域完全可能被互换。通常,对于图像中目标与背景区域的区分,多是由观察者根据以往的经验或者持有的态度对其进行主观判断。除此之外,图像各部分的明暗差别、面积比例及形状等因素,也都会对人的主观判断产生一定的影响。人们通过遵循某种组织原则而将图像的各部分有机地联系起来。
对于自然表面和人工目标,反射辐射的偏振特性取决于其表面的固有属性,如其介质特性、结构特征、水分含量、观察角、辐照度等条件。
- 沙和土壤:土壤反射的偏振与其结构、化学及矿物组成有关,土壤中水分含量也严重影响到偏振度的大小。沙和土壤的反射偏振度与照明条件、观测条件有关,偏振的分布也比较明显。
- 岩石:岩石偏振辐射的变化与其金属含量以及所受碳氢污染程度有关。岩石的偏振图像有助于其识别和标记,因而这些特征已经被广泛地应用于行星探测方面。
- 植被:对小麦进行估产检测,可通过具有不同叶面角度密度函数的两种小麦的偏振辐射有明显的差别的特点观测小麦的抽穗期,通过偏振效应清晰地反映小麦的这一特殊生长形态。
- 水表面:自然水体表面镜面反射遵循菲涅尔法则。在偏振探测中,一是可以利用水体表面的偏振分布特征有效减弱太阳耀斑对目标探测的影响,二是可以利用太阳耀斑来获取水面状态信息,如波纹、波高等,特别是对油膜的分布区域判断相当有效。另外,偏振对水体中的悬浮粒子的特性、尺度及浓度等探测均有效。
- 人工目标:人工目标所具有的偏振信息及其构成、形态和状态有关,水泥路面与柏油路面、钢铁与橡胶、真实环境与模拟环境等均可以应用偏振信息识别。
同非偏振测量相比,偏振测量能得到更多易于区分目标的特征信息。大量实验研究表明,地物目标,特别是人工目标(伪装)的偏振信息在有效识别和抗干扰方面有重要的实用性。在地面暗目标、暗背景或大角度低照度情况下,反射辐射虽然量值不大,但偏振效应十分明显。
4.2 红外偏振成像技术的特点
红外偏振成像探测就是通过线偏振器件对场景的反射光或自身辐射进行偏振滤波,然后通过光电成像器件得到场景的线偏振图像。由于偏振信息是不同于辐射的另一种表征事物的信息,相同辐射的被测物体可能有不同的偏振特性,因此,利用偏振探测器可以像辐射强度探测一样对物体进行特性表征和区别,能做低照度条件下检出有用信号。红外偏振成像与传统的红外成像(光强成像)是兼容的,即两物点之间的温差增大,图像对比度也会相应增强。对于任意目标,只要从光滑表面反射或辐射,并以一定角度来观测,其辐射或反射光的线偏振总会发生,相对于较粗糙的泥土、植被等,背景辐射或反射则几乎不表现出偏振特性,而人造物体由于光滑表面的反射或辐射多表现为不同程度的部分偏振。
红外偏振成像技术主要通过目标与景物的红外辐射及偏振特性差异进行目标探测与识别。红外偏振成像技术最显著的特点就是:可将传统热像仪无法辨别的目标与背景很轻松地区别开来。由于传统热像仪测量的是物体的辐射强度,而偏振量测量的是不同偏振方向上物体辐射对比度,所以它能够将辐射强度相同而偏振特性不同的物体区别开来。
与传统的红外成像技术相比,红外偏振成像技术有以下几点优势:
- 偏振测量无需精准的辐射量校准就可以达到相当高的精度,这是由于偏振度是辐射量之比。而在传统的红外辐射量测量中,红外测量系统的定标对于红外系统测量的准确度至关重要。红外器件的老化,光电转换设备的老化,电子线路的噪声,甚至环境温度、湿度的变化都会影响到红外系统。如果红外系统的状态已经改变,但是系统没有及时定标,所测量的红外辐射亮度和温度也必然不能反映被测物体的真是辐射温度和亮度。
- 大量国内外研究表明:目标和背景差别较大,其中自然环境中地物背景的红外偏振度非常小(<1.5%),只有水体体现出较强的偏振特性,其偏振度一般在8%~10%。而金属材料目标的红外偏振度相对较大,达到了2%~7%,因此以金属材料为主体的车辆的偏振度和地物背景的偏振度差别也较大,两物体偏振度值差别达到1%,成偏振图像后我们就能够很好地分辨出两物体之间的差异。所以利用红外偏振成像技术识别地物背景中的车辆目标具有明显的优势。
- 军事中经常使用伪装涂料对目标进行伪装,喷涂了红外伪装漆的金属板的发射率会改变。辐射率比较低的热红外伪装漆可以使目标在红外辐射强度图中有较低的灰度值,与普通材料相比,伪装涂料能有效地减弱目标的红外特征,达到红外波段伪装目标的目的。然而经过伪装的目标板的偏振度没有随发射率的变化而有较大改变,改变金属板发射率的伪装方法对半的偏振度的影响比较小。因此在偏振图像中经过伪装的目标失去了伪装效果而很容易被发现。
- 红外偏振成像系统在取得偏振测量结果的同时,还能够提供辐射量的数据。
5 应用与试验
5.1 军事领域的应用
1)地雷探测
2)伪装目标探测识别
通过实验研究表明,红外偏振成像对目标(金属板)的探测效果都明显优于红外成像。因此,利用偏振信息,传统的红外伪装将出现明显的局限性。(目前国内仍停留在基于电磁强度特性和几何特性等信息的传统红外伪装技术阶段,其更能显示出研究对抗红外辐射侦察手段和方法的必要性)。利用红外偏振方法可有效地抑制背景,提高目标探测率(红外偏振成像的信噪比提高到30倍)。在大多数有杂波干扰的情况下,红外偏振成像比普通红外成像能探测到波长范围更广的目标。美国一些科研机构正在研究针对红外偏振成像的隐身技术,例如将物体的表面处理为类球面,以减少其偏振效应。
5.2 民用
1)天文探测 2)大气探测 3)地球资源调查 4)医学诊断 5)海洋监测
6)目标检测 7)物质分类和目标识别 8)散射介质成像
5.3 试验分析
5.3.1 室内试验及特性分析
1)盛热水的玻璃水杯红外辐射偏振特性分析(P84)
2)盛热水的保温水杯红外辐射偏振特性分析
5.3.2室外试验及特性分析
1)城市天线类目标(金属、水泥等)(P88)
2)建筑物类目标
3)水上船类目标
4)车辆类目标
5)红外标准板及黑体
综上:
- 偏振度信息对目标的轮廓识别比较明显,同时针对不同材料的物体,其识别度会有一定差异;
- 而偏振角则包含目标更多的细节,可反映物体的表面之间辐射和反射相位差,所以偏振角图像更加立体形象,如表面粗糙度、材料特性等。
- 偏振信息图像形象地展现了物体的结构;
- 偏振信息图像可反映背景的表面偏振信息(传统红外做不到);
- S1和S2图像均具有类似边缘提取的效果,但其对金属(电线)的突出效果明显强于对水泥电线杆的,这表明红外偏振成像具有突显金属目标轮廓的能力。

















 4828
4828

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









