







dts -> dtb -> device_node -> platform_device
两个问题:
a. 哪些device_node可以转换为platform_device?
根节点下含有compatile属性的子节点
如果一个结点的compatile属性含有这些特殊的值("simple-bus","simple-mfd","isa","arm,amba-bus")之一, 那么它的子结点(需含compatile属性)也可以转换为platform_device
i2c, spi等总线节点下的子节点, 应该交给对应的总线驱动程序来处理, 它们不应该被转换为platform_device
b. 怎么转换?
platform_device中含有resource数组, 它来自device_node的reg, interrupts属性;
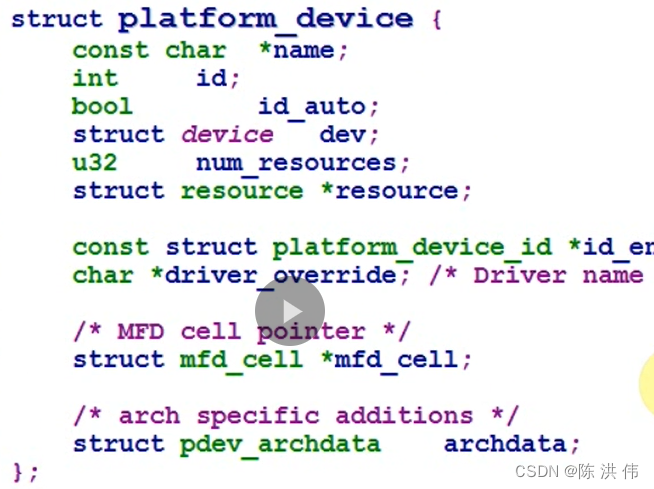
platform_device.dev.of_node指向device_node, 可以通过它获得其他属性
本节总结:
a. 内核函数of_platform_default_populate_init, 遍历device_node树, 生成platform_device
b. 并非所有的device_node都会转换为platform_device
只有以下的device_node会转换:
b.1 该节点必须含有compatible属性
b.2 根节点的子节点(节点必须含有compatible属性)
b.3 含有特殊compatible属性的节点的子节点(子节点必须含有compatible属性):
这些特殊的compatilbe属性为: "simple-bus","simple-mfd","isa","arm,amba-bus"
b.4 示例:
比如以下的节点,
/mytest会被转换为platform_device,
因为它兼容"simple-bus", 它的子节点/mytest/mytest@0 也会被转换为platform_device
/i2c节点一般表示i2c控制器, 它会被转换为platform_device, 在内核中有对应的platform_driver;
/i2c/at24c02节点不会被转换为platform_device, 它被如何处理完全由父节点的platform_driver决定, 一般是被创建为一个i2c_client。
类似的也有/spi节点, 它一般也是用来表示SPI控制器, 它会被转换为platform_device, 在内核中有对应的platform_driver;
/spi/flash@0节点不会被转换为platform_device, 它被如何处理完全由父节点的platform_driver决定, 一般是被创建为一个spi_device。
/ {
mytest {
compatile = "mytest", "simple-bus";
mytest@0 {
compatile = "mytest_0";
};
};
i2c {
compatile = "samsung,i2c";
at24c02 {
compatile = "at24c02";
};
};
spi {
compatile = "samsung,spi";
flash@0 {
compatible = "winbond,w25q32dw";
spi-max-frequency = <25000000>;
reg = <0>;
};
};
};
函数调用过程:
a. of_platform_default_populate_init (drivers/of/platform.c) 被调用到过程:
start_kernel // init/main.c
rest_init();
pid = kernel_thread(kernel_init, NULL, CLONE_FS);
kernel_init
kernel_init_freeable();
do_basic_setup();
do_initcalls();
for (level = 0; level < ARRAY_SIZE(initcall_levels) - 1; level++)
do_initcall_level(level); // 比如 do_initcall_level(3)
for (fn = initcall_levels[3]; fn < initcall_levels[3+1]; fn++)
do_one_initcall(initcall_from_entry(fn)); // 就是调用"arch_initcall_sync(fn)"中定义的fn函数
b. of_platform_default_populate_init (drivers/of/platform.c) 生成platform_device的过程:
of_platform_default_populate_init
of_platform_default_populate(NULL, NULL, NULL);
of_platform_populate(NULL, of_default_bus_match_table, NULL, NULL)
for_each_child_of_node(root, child) {
rc = of_platform_bus_create(child, matches, lookup, parent, true); // 调用过程看下面
dev = of_device_alloc(np, bus_id, parent); // 根据device_node节点的属性设置platform_device的resource
if (rc) {
of_node_put(child);
break;
}
}
c. of_platform_bus_create(bus, matches, ...)的调用过程(处理bus节点生成platform_devie, 并决定是否处理它的子节点):
dev = of_platform_device_create_pdata(bus, bus_id, platform_data, parent); // 生成bus节点的platform_device结构体
if (!dev || !of_match_node(matches, bus)) // 如果bus节点的compatile属性不吻合matches成表, 就不处理它的子节点
return 0;
for_each_child_of_node(bus, child) { // 取出每一个子节点
pr_debug(" create child: %pOF\n", child);
rc = of_platform_bus_create(child, matches, lookup, &dev->dev, strict); // 处理它的子节点, of_platform_bus_create是一个递归调用
if (rc) {
of_node_put(child);
break;
}
}
d. I2C总线节点的处理过程:
/i2c节点一般表示i2c控制器, 它会被转换为platform_device, 在内核中有对应的platform_driver;
platform_driver的probe函数中会调用i2c_add_numbered_adapter:
i2c_add_numbered_adapter // drivers/i2c/i2c-core-base.c
__i2c_add_numbered_adapter
i2c_register_adapter
of_i2c_register_devices(adap); // drivers/i2c/i2c-core-of.c
for_each_available_child_of_node(bus, node) {
client = of_i2c_register_device(adap, node);
client = i2c_new_device(adap, &info); // 设备树中的i2c子节点被转换为i2c_client
}
e. SPI总线节点的处理过程:
/spi节点一般表示spi控制器, 它会被转换为platform_device, 在内核中有对应的platform_driver;
platform_driver的probe函数中会调用spi_register_master, 即spi_register_controller:
spi_register_controller // drivers/spi/spi.c
of_register_spi_devices // drivers/spi/spi.c
for_each_available_child_of_node(ctlr->dev.of_node, nc) {
spi = of_register_spi_device(ctlr, nc); // 设备树中的spi子节点被转换为spi_device
spi = spi_alloc_device(ctlr);
rc = of_spi_parse_dt(ctlr, spi, nc);
rc = spi_add_device(spi);
}
参考文献:下面这篇博客介绍的挺好的
https://www.cnblogs.com/schips/p/linux_driver_device_node_to_platform_device.html















 1782
1782











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











