







 本文详细介绍了如何使用Dlib进行人脸关键点检测,并结合OpenCV的solvePnP函数估计人脸姿态,最终将旋转向量转换为欧拉角,以获取人脸的俯仰、偏航和翻滚角度。
本文详细介绍了如何使用Dlib进行人脸关键点检测,并结合OpenCV的solvePnP函数估计人脸姿态,最终将旋转向量转换为欧拉角,以获取人脸的俯仰、偏航和翻滚角度。
1.简介
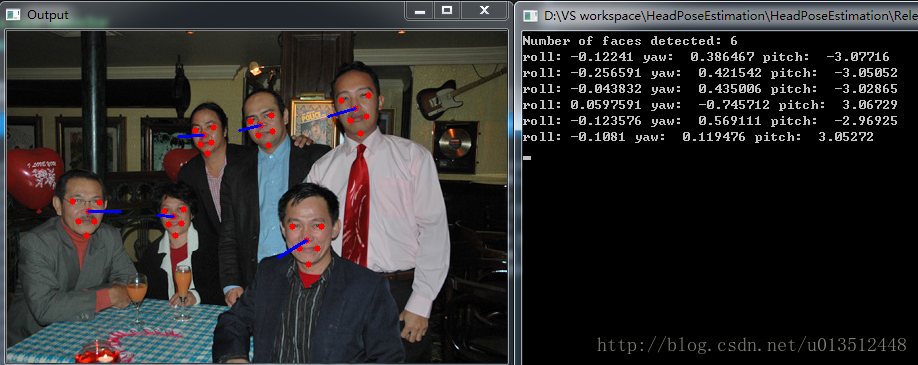
人脸姿态估计主要是获得脸部朝向的角度信息。本文获得的人脸姿态信息用三个欧拉角(pitch,yaw,roll)表示。
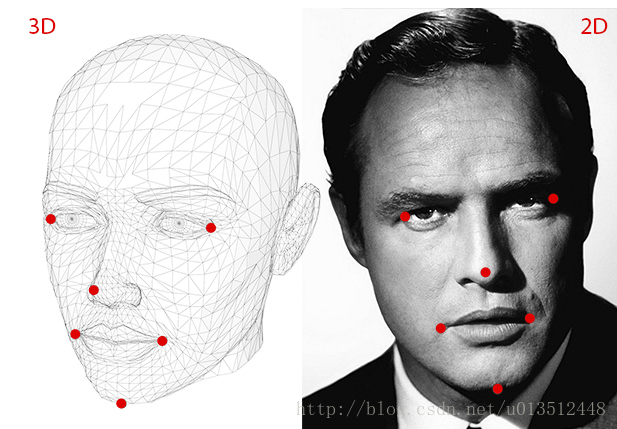
首先定义一个6关键点的3D脸部模型(左眼角,右眼角,鼻尖,左嘴角,右嘴角,下颌),然后采用Dlib检测出图片中对应的6个脸部关键点,采用OpenCV的solvePnP函数解出旋转向量,最后将旋转向量转换为欧拉角。
2.定义6关键点的3D Model
// 3D model points.
std::vector<cv::Point3d> model_points;
model_points.push_back(cv::Point3d(0.0f, 0.0f, 0.0f)); // Nose tip
model_points.push_back(cv::Point3d(0.0f, -330.0f, -65.0f)); // Chin
model_points.push_back(cv::Point3d(-225.0f, 170.0f, -135.0f)); // Left eye left corner
model_points.push_back(cv::Point3d(225.0f, 170.0f, -135.0f)); // Right eye right corner
model_points.push_back(cv::Point3d(-150.0f, -150.0f, -125.0f)); // Left Mouth corner
model_points.push_back(cv::Point3d(150.0f, -150.0f, -125.0f)); // Right mouth corner3.基于Dlib的人脸关键点检测
Dlib提供了一个68关键点的检测模型,而且是按照顺序排列的。因此可以直接索引到需要的6个关键点。
3.1 Dlib的使用
首先前往Dlib官网下载源码并解压。有多种编译方式,这里介绍比较简单的在VS2015的编译方式。
首先把dlib/all/source.cpp添加到工程里,然后把Dlib的路径添加到工程属性表的include里。具体参见Dlib的how to compile页面。
<Compiling on Windows Using Visual Studio 2015 or Newer
All you need to do is create an empty console project. Then add dlib/all/source.cpp to it and add the folder containing the dlib folder to the #include search path. Then you can compile any example program by adding it to your project.
Again, note that dlib will only be able to work with jpeg and png files if you link in libjpeg and libpng. In Visual Studio, the easiest way to do this is to add all the libjpeg, libpng, and zlib source files in the dlib/external folder into your project and also define the DLIB_PNG_SUPPORT and DLIB_JPEG_SUPPORT preprocessor directives. If you don’t know how to configure Visual Studio then you should use CMake as shown above since it will take care of everything automatically.
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章
















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









