







苏联航天机械导航计算机 Globus INK 内部
原创 Shirriff 芯片之家

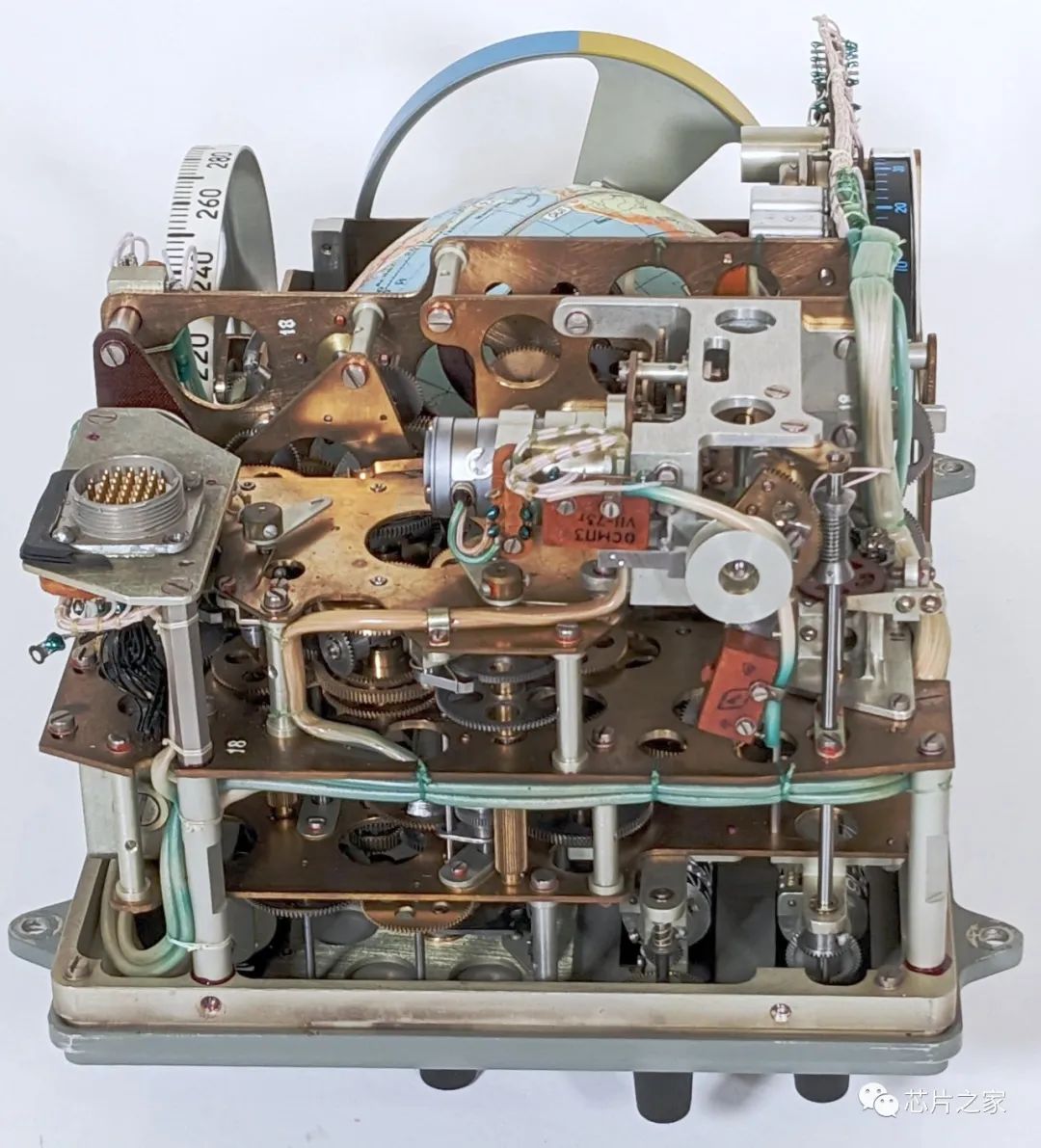
苏联太空计划使用与美国航天器完全不同的控制装置和仪器,联盟号宇宙飞船上最有趣的导航仪器之一是 Globus,它使用旋转的地球仪来指示宇宙飞船在地球上方的位置,这种导航仪器是一种机电模拟计算机,它使用齿轮、凸轮和差速器组成的精密系统来计算航天器的位置。
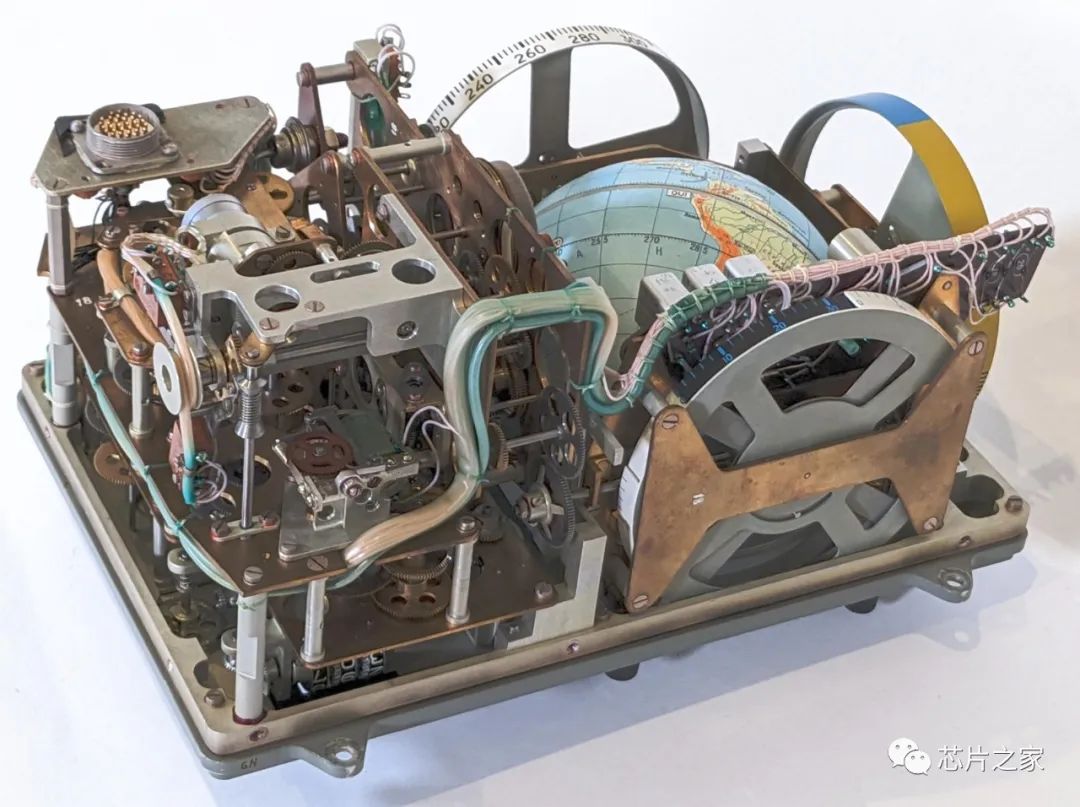
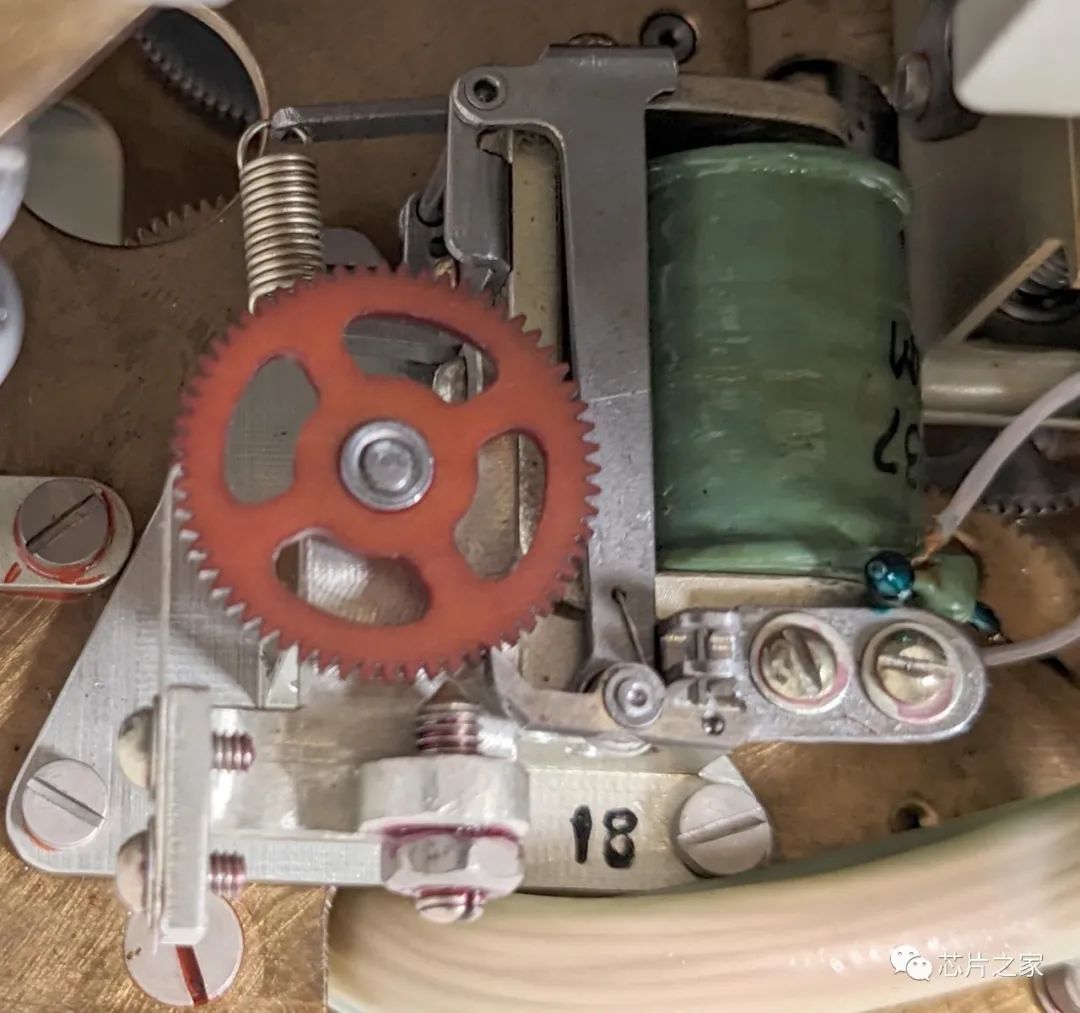
最近从一位收藏家那里收到了一个 Globus,将其打开进行维修和逆向工程。大概看看它是如何运作的,这里展示下它的内部机制,并描述了到目前为止我从逆向工程中学到的东西。下图展示了该设备的机械复杂性,**其中还包含一些继电器、螺线管和其他电气元件。
功能性
Globus 的主要目的是指示航天器的位置。地球仪旋转,塑料圆顶上固定的十字准线指示航天器的位置。因此,地球仪与宇航员对地球的看法相匹配,使他们能够确认自己的位置。地球旁边的纬度和经度刻度盘提供了位置的数字指示。同时,底部的光影刻度盘显示飞船何时会被太阳照亮或处于阴影中,这是对接的重要信息。Globus 也有一个轨道计数器,指示轨道数。
Globus 有第二种模式,指示航天器如果发射逆向火箭开始着陆,将在何处着陆。 按下开关会导致地球仪旋转,直到着陆点位于十字准线下方,宇航员可以评估该着陆点的适用性。
宇航员通过转动旋钮来设置航天器的初始位置和轨道周期来配置 Globus,与阿波罗制导计算机不同,Globus 没有从惯性测量单元 (IMU) 或其他来源接收导航信息,因此它不知道航天器的真实位置,纯粹是预测位置的显示。

地球着陆
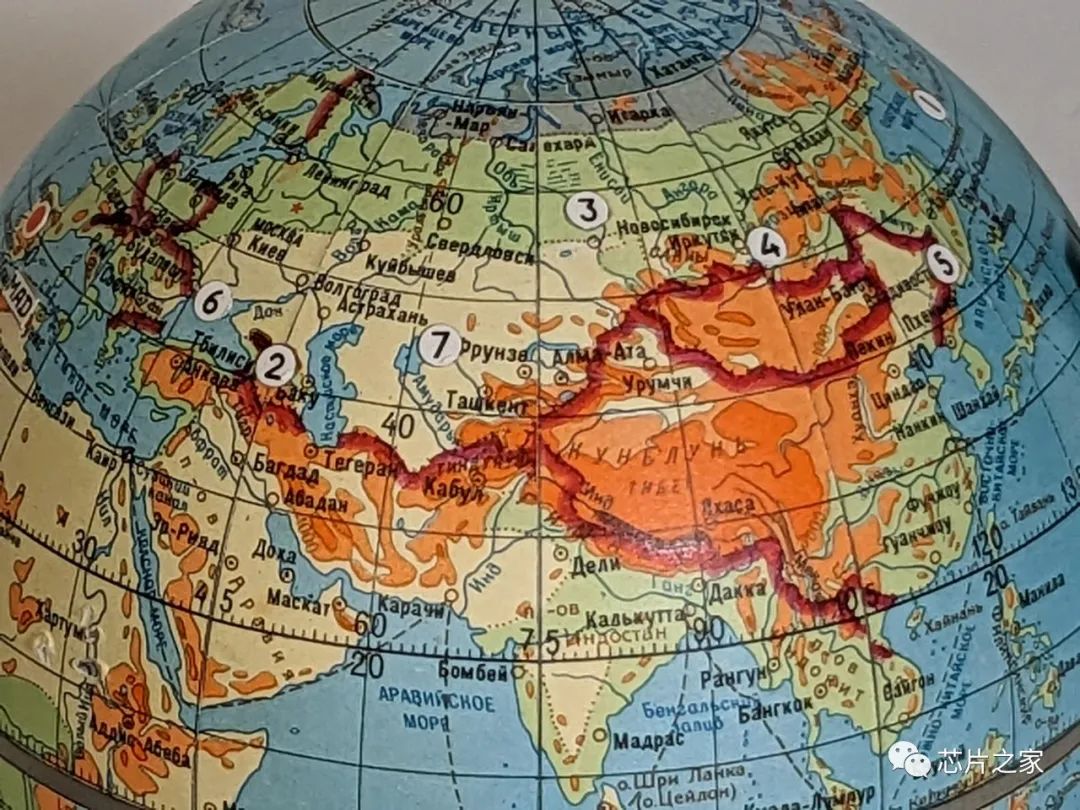
地球本身因其体积小,这里显示了山脉、湖泊和河流等地形特征。地图上的这些特征帮助宇航员将他们的位置与他们在地球上看到的地理特征进行比较。 这些特征对于选择着陆点也很重要,这样他们就可以看到他们将在什么样的地形上着陆。大多数情况下,地图没有显示政治边界,除了红色和紫色的粗线。这条线显示了苏联的边界,以及共产主义国家和非共产主义国家之间的边界,对于选择着陆点也很重要。地球上还有编号为 1 到 8 的圆圈,表示与航天器通信的无线电站点,使宇航员能够确定可以联系哪些地面站。



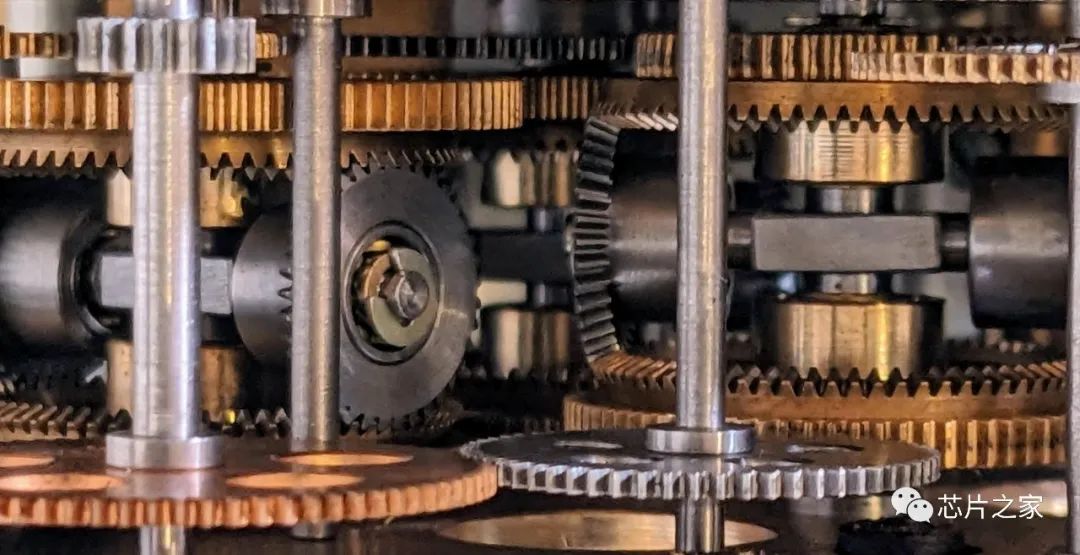
Globus 使用大量差动齿轮来增加或减少旋转,下图显示了两组并排的差速器。
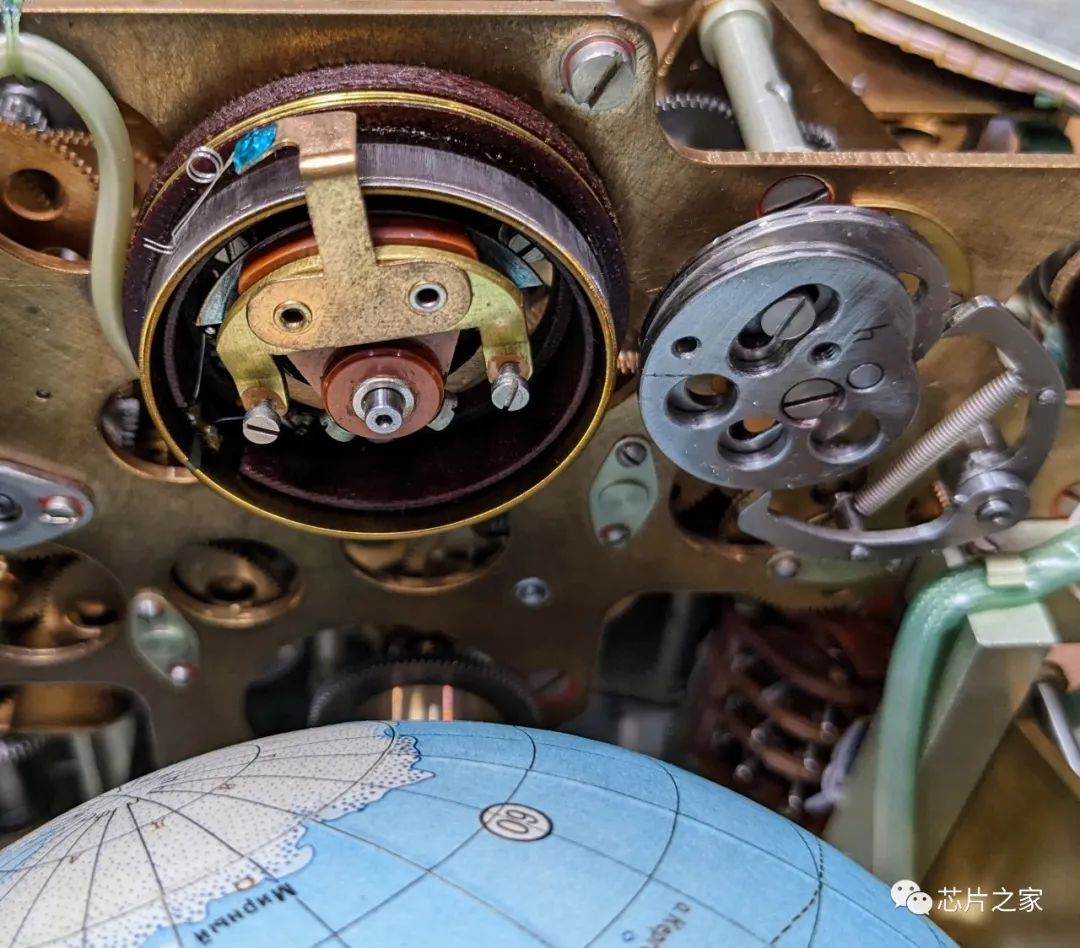
为了获得着陆位置,电机旋转地球仪直到旋转指定角度后停止。实现它的机制如下所示。面板上的调节旋钮转动调节轴,通过涡轮将限位开关移动到所需角度,电线缠绕在一个轮子上,因此在此移动过程中电线保持受控,当驱动电机启动时,它会同时旋转地球仪和摆臂。由于当摆臂碰到角度限位开关时电机停止,因此地球仪会旋转所需的角度。固定限位开关用于将地球仪的位置返回到其常规的轨道位置。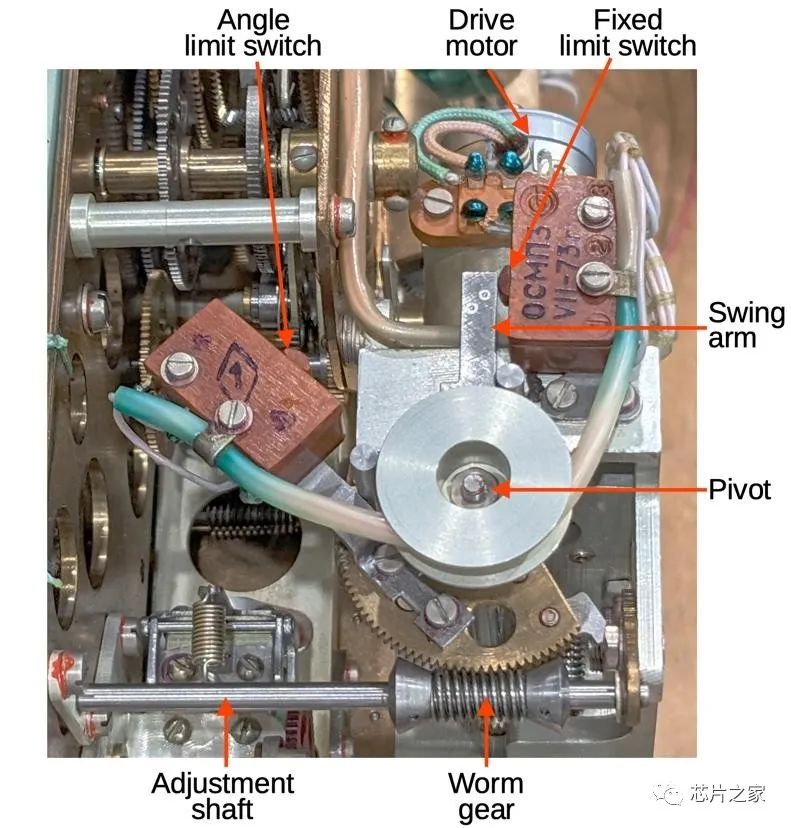
电子部分
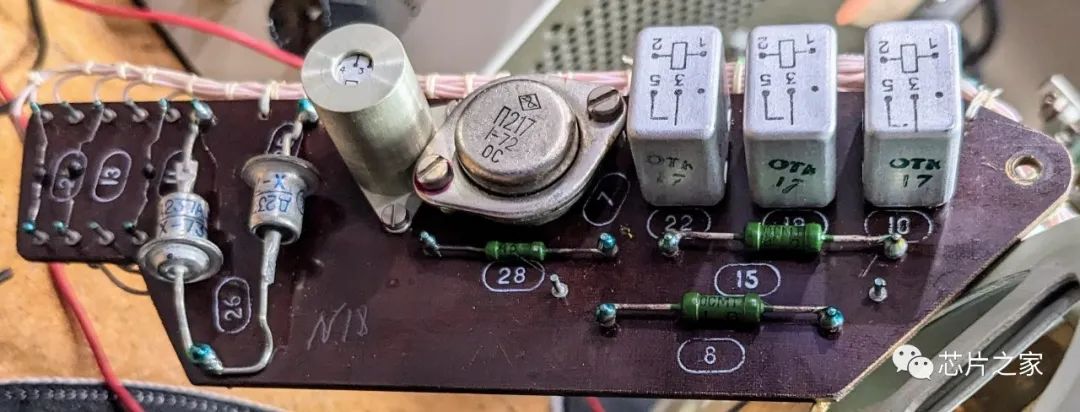
虽然 Globus 主要是机械式的,但它有一块电子板,上面有四个继电器和一个晶体管,以及电阻器和二极管。 我认为这些继电器中的大多数控制着陆位置机构,驱动电机前进或后退并在限位开关处停止,**二极管是反激式二极管,两个二极管串联在每个继电器线圈上,以消除线圈断开时的感应冲击。
60 年代的继电器的样子
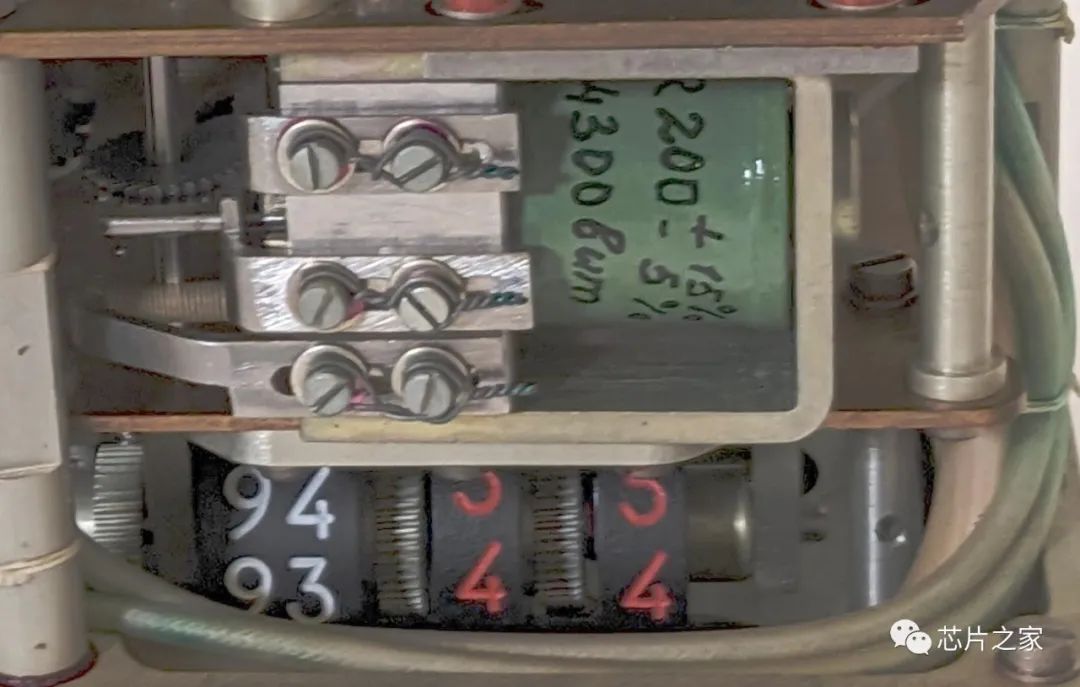
一个 360° 电位器(下图)将航天器的轨道位置转换为电压。消息来源表明,Globus 将此电压信号提供给航天器上的其他单元。我感觉是电子板上的晶体管放大了这个电压,但仍在确认中。
60 年代的电位器的样子
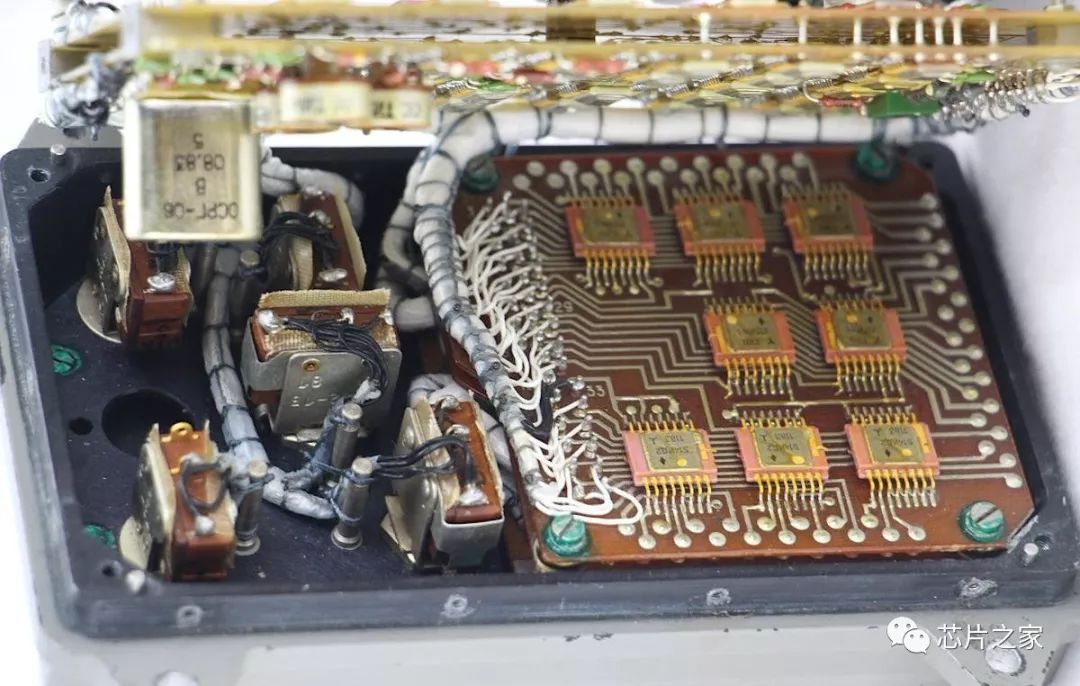
下图显示了 Globus 中的多个接线束,位于前面和左侧。电子板在右前方。Globus 包含惊人数量的接线,用于主要是机械的设备。不方便的是,盒子外部连接器(左上)的所有电线都被切断了,也许这是该装置退役的一部分。然而,表壳上的一个螺丝上覆盖着一个带有徽章的防篡改蜡封,这个蜡封完好无损。这表明该装置在切断电线后正式重新密封,这对于退役装置没有意义。
整齐美观的线束
驱动螺线管
该装置由两个棘轮螺线管驱动:一个用于轨道旋转,一个用于地球自转。这些螺线管接收 1 赫兹的 27 伏脉冲。3 每个脉冲使螺线管使齿轮前进一个齿;棘爪可防止齿轮滑回。这些小的旋转驱动整个 Globus 的齿轮,并导致地球仪发生微小的移动。
最后
Globus INK 是一台非凡的机器,一台模拟计算机,通过齿轮、凸轮和差速器的复杂系统计算轨道。**它为宇航员提供了航天器位置的高分辨率、全彩显示,远远超过了 1960 年代电子太空计算机所能提供的。
虽然 Globus 是一种令人惊叹的机械计算,但它的功能是有限的。它的参数必须手动配置:航天器的起始位置、轨道速度、光 / 影区域和着陆角度。它不接受任何外部引导输入,例如 IMU(惯性测量单元),因此它不是特别准确。最后,它只支持固定角度的圆形轨道。虽然更现代的数字显示器缺乏旋转地球仪的物理魅力,但数字解决方案提供了更多的功能。

**反正也看不懂,大家欣赏下照片好了,真想不出这是上世纪 60 年代的产物,涉及到太多专业的领域,物理,化学,基础材料,电子,机械,航天等等的完美结合。只想说,搞这些的人是真正研究科技的人,当下,我们,最缺的也是这样的科技人才,真正沉下心来,不浮躁,真正做技术。
-
Globus INK 内部:欣赏下用于苏联航天的机械导航计算机 原创 Shirriff 芯片之家 2023年03月01日 12:15 广东
上世纪苏联联盟号宇宙飞船内部时钟电路
原创 晓宇 芯片之家(ID:chiphome-dy) 2020 年 01 月 20 日 17:31
作者:Ken Shirriff,排版整理:晓宇

最近获得了一个飞过联盟号太空任务的时钟,该时钟制造于 1984 年,在十个电路板上包含 100 多个集成电路,一个时钟怎么这么复杂,本文给大家简单解释下。同时窥见下鲜为人知的苏联航空电子世界,以及与当年美国技术的比较。

联盟号飞船系列是为苏联太空计划设计的,是月球竞赛的一部分。联盟号(Soyuz)于 1966 年首次飞行,并且在过去 50 年中进行了 140 多次飞行。航天器(下图)由三部分组成。左侧的圆形部分是轨道或居住舱,容纳货物,设备和起居空间。中间的下降模块是返回地球的唯一部分。在发射和重返期间,宇航员坐在下降模块中。右侧的服务模块具有主机,太阳能电池板和其他系统。

2006 年,NASA 拍摄
下降模块包含航天器的控制面板(如下图),注意左上方的数字时钟。早期的联盟号飞船使用了模拟时钟,但从 1996 年到 2002 年,飞船使用了数字时钟。和平号空间站也使用了数字时钟。后来的联盟号飞船取消了时钟,该飞船使用控制面板上的两个计算机屏幕代替了早期的控件。

数字时钟在左上方,中间屏幕是监视器

红色字母就是俄语翻译成的英文
看到这个,我辈肯定想知道这个时钟里面是什么,于是 Marc 拧开了盖子,将它从钟表上取下了,这表明内部有密集的电路板。时钟比预期的要复杂得多,十块电路板塞满了表面安装的 IC 和其他组件。组件安装在两层印刷电路板上,这是一种常见的构造技术。这些板使用了通孔元件和表面安装的元件,即,通过将电阻器和电容器的引线穿过板上的孔来安装它们。另一方面,将表面安装集成电路焊接到板顶部的焊盘上,这比 1984 年的美国消费电子产品要先进得多,后者通常使用较大的通孔集成电路,直到 1980 年代后期才开始使用表面贴装 IC。(相比之下,美国航空计算机从 1960 年代就开始使用表面贴装 IC)

去掉了盖子
一个有趣的特征是,电路板通过捆绑在线束中的独立电线连接(如下图)。这些板的侧面有成排的引脚,并将导线焊接到这些引脚上。这些电线被捆成一捆,用塑料包裹,然后小心地绑扎到与电路板相连的线束中。

不同板之间的连线包裹在整齐的线束中

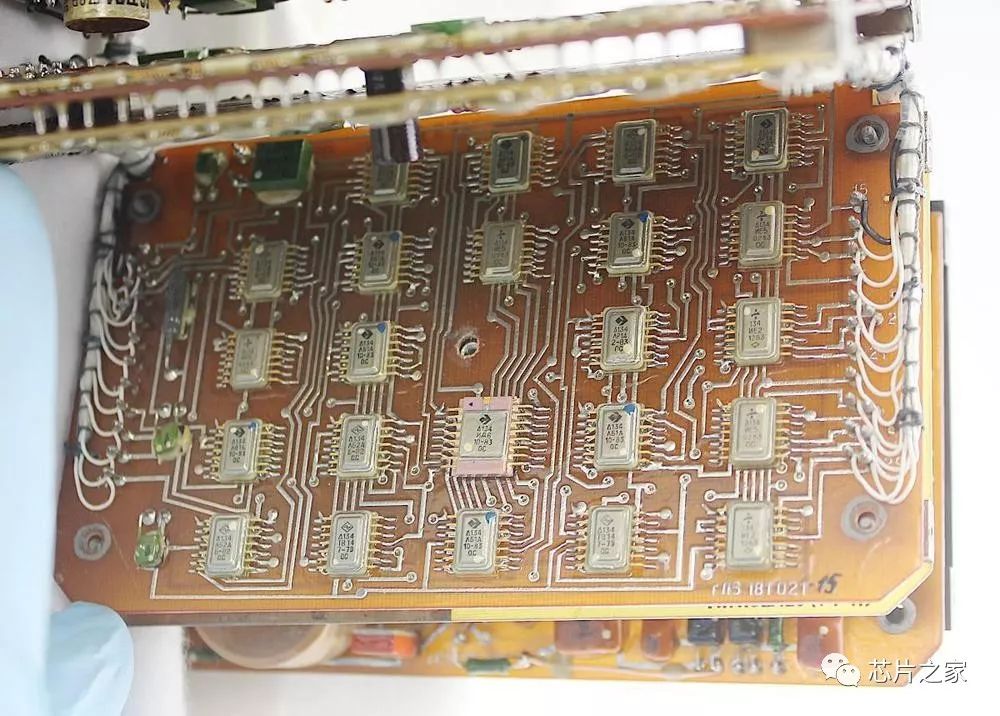
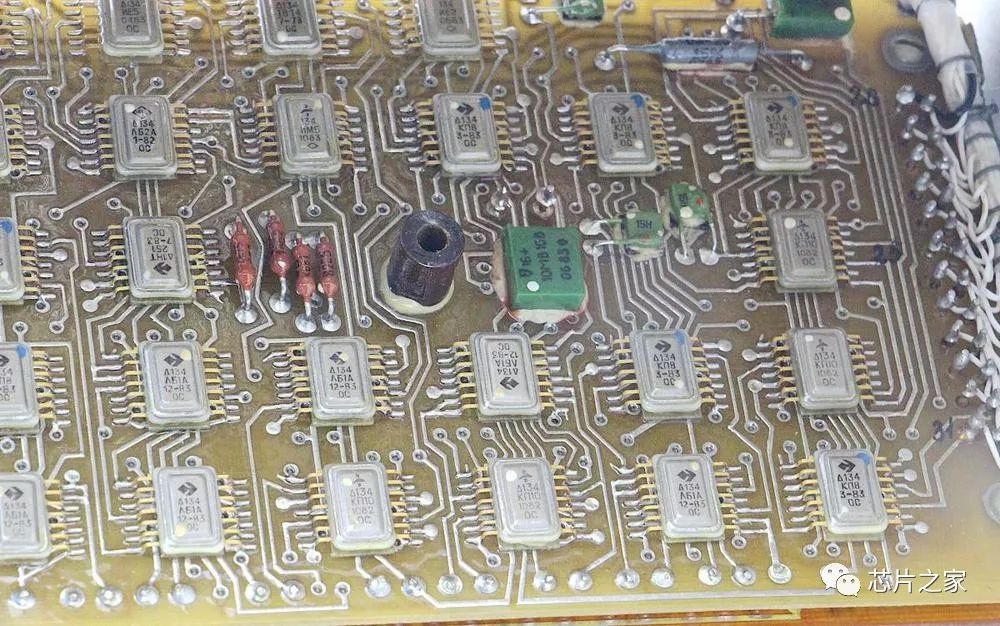
在上面的照片中,这些大多数是 14 引脚扁平封装的集成电路,采用金属封装,与当代美国集成电路通常采用黑色环氧树脂封装的情况不同。还有一些用粉红色陶瓷封装 16 引脚的集成电路。
航天器通过该接口为时钟提供 24 伏特电压,以及外部定时脉冲和秒表控制信号。当达到警报时间时,时钟可以通过继电器触点向航天器发出信号。

不同中 19 针连接器将时钟连接到主控
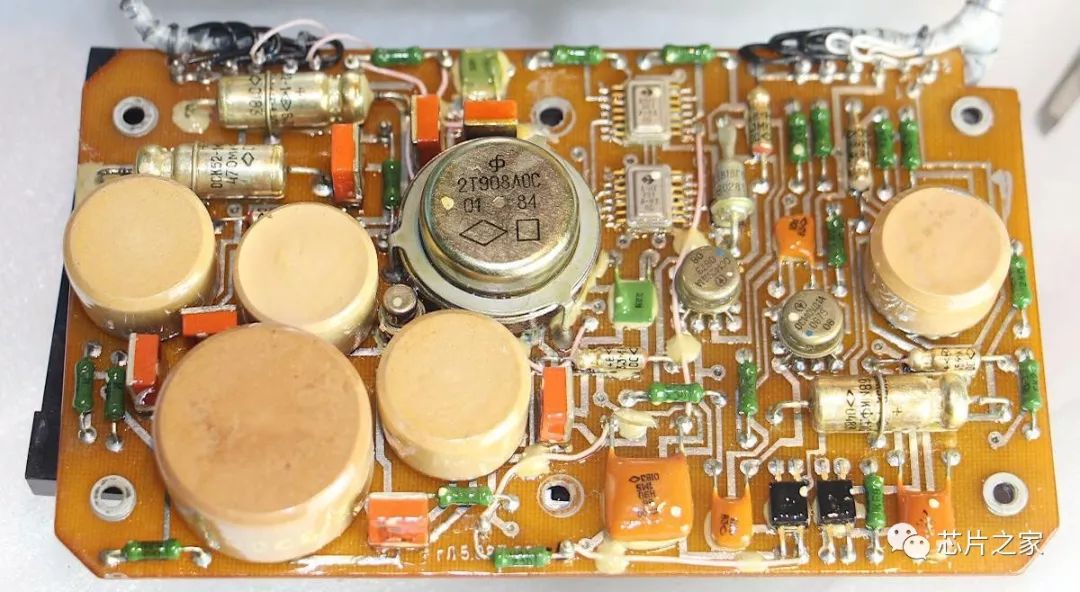
时钟后面的两个电路板是电源,第一块板下面是一个开关电源,它将航天器的 24 伏电源转换为集成电路所需的 5 伏电源。圆形陶瓷组件是电感器,范围从简单的线圈到复杂的 16 引脚电感器。控制电路包括两个金属罐封装的运算放大器。其他两个看起来像集成电路的封装,每个封装都包含四个晶体管。在它们旁边,有一个子弹形的齐纳二极管设置输出电压电平。大的圆形开关功率晶体管在板的中间可见。我们可能希望电源是一个简单的降压转换器。但是,电源使用更复杂的设计来提供航天器和时钟之间的电隔离。
不开关电源,为时钟产生 5V 电压
电源中的许多组件看起来与美国组件不同。美国电阻通常标有彩色带,而苏联电阻是绿色的圆柱体,上面印有其值。与通常的圆柱形美国二极管不同,苏联二极管具有橙色矩形包装(下图)。电路板中间的功率晶体管是圆形的,缺少采用 “ TO-3 ” 封装的美国功率晶体管。由此我们看到两国的构成如何不同。

电压电源使用长方形橙色的二极管,OC 表示军工级别的
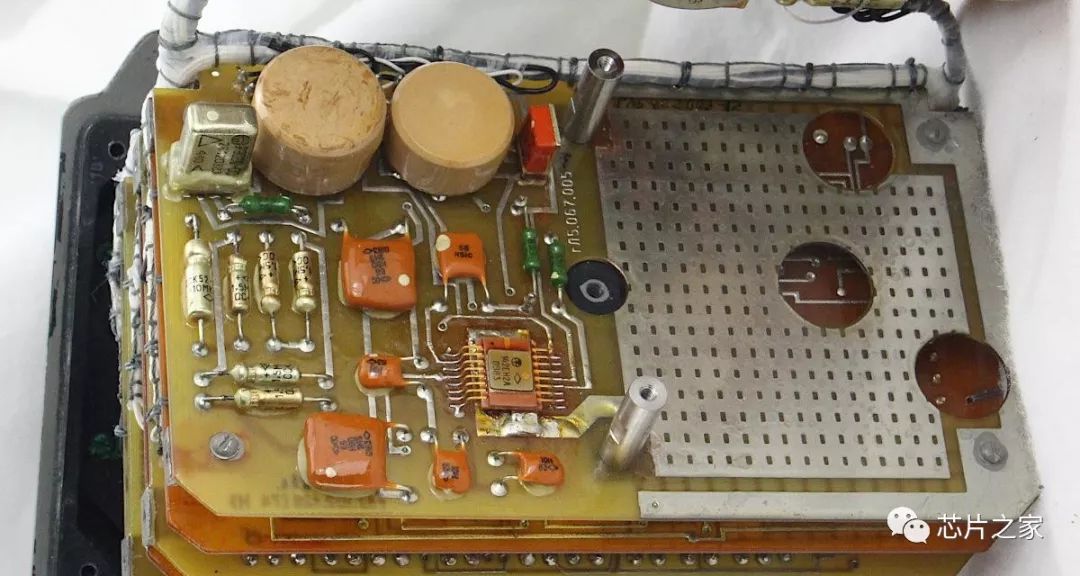
第二块板也是电源的一部分,但是要简单得多。有用于对电源进行滤波的电感器和电容器,以及用于为第一块板上的运算放大器 IC 产生 15 伏电压的线性稳压器芯片(粉红色)。稳压器芯片的底部有两个大的金属凸耳,这些凸耳被焊接到电路板上以散热。奇怪的是,该板的右侧有三个大孔。一种解释是,这些孔为较高的组件提供了空间,这种情况在另一块板上会出现。但是,没有适合该板上孔的组件。因此,感觉该板最初是为其他设备设计的,并且可以在时钟中重复使用。
右半部分是用于散热的
其余板上装有数字逻辑集成电路。板 3(下面)和板 5(类似)实现当前时间和警报时间功能。每个板包含六个 BCD 计数器芯片,用于表示六个数字(小时,分钟和秒)。此外,每个数字计数器都需要一个逻辑芯片来控制其递增的时间,并需要另一个芯片来控制何时对其进行复位,这取决于是设置时钟还是运行时钟。(这是需要这么多芯片的原因之一。)板上的粉红色芯片控制在设置时钟时修改哪个数字。
第 4 板(以下)具有两个功能。首先,它控制时钟是显示当前时间还是显示闹钟时间。这通过每个数字的选择芯片来实现。其次,当当前时间到达警报时间时,该板会向航天器发出信号。这是由多个芯片实现的,以逐步遍历每个数字,比较时间并确定它们是否匹配。因此,即使该板的功能看起来很简单,它们也需要一整块芯片。电路板的底部连接板 4 到板 5。板子通过线束连接到板 3。
当前时间和警报时间之间选择,比较报警
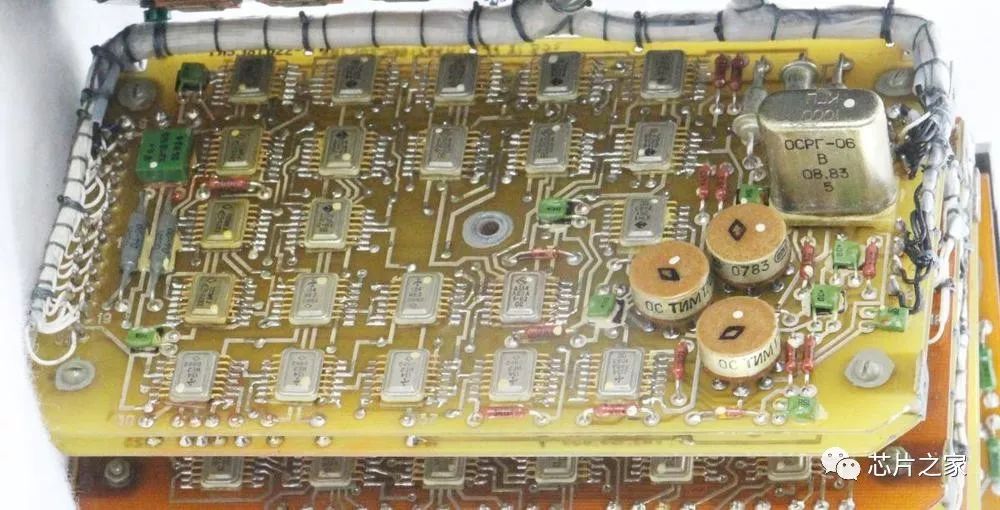
一些板上的电路不仅仅是数字逻辑。例如,板 6 和 7 具有脉冲变压器,通过 19 针连接器将输入时钟的控制信号电隔离。(在我们现在的电路中,此作用将由光隔离器来完成。)这些变压器看上去有点像蘑菇或微型水塔,可以在下面的照片中看到。板 7 还具有石英晶体,即下面的金属矩形。

三个圆形脉冲变压器,可将控制信号与航天器隔离
板 7(如下)的两个功能是生成时钟的定时脉冲并实现秒表。石英晶体产生精确的 1 兆赫兹脉冲。六个 BCD 计数器将这些脉冲减小为一秒的脉冲。每个计数器芯片将频率除以 10。这些定时脉冲由其余的时钟使用。为了实现秒表,板上有四个 BCD 计数器,用于显示四个数字。它还具有启动,停止和重置秒表的控制逻辑。当发生某些事件时,三个脉冲变压器使航天器能够控制秒表。其他芯片可处理这些模式更改。
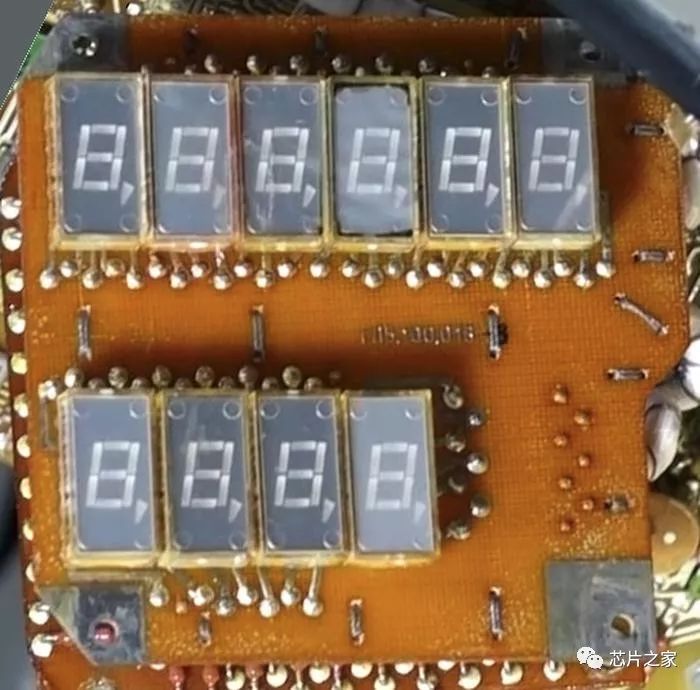
八号和九号板驱动 LED 显示屏。每个 LED 位数都需要一个芯片,以根据 BCD(二进制编码的十进制)值来点亮 7 段 LED 的适当段。这些 BCD 至 7 段驱动器芯片是板上的粉红色 16 引脚芯片。由于时钟总共显示 10 位,因此使用了 10 个驱动器芯片。板 8 上有八个驱动器芯片,而板 9 上有两个芯片以及多个 LED 限流电阻。下图也显示了控制时钟的开关。
最后,第 10 个板(如下)包含十个 LED 数字。每个数字都由一个七段 LED 以及一个逗号组成。我认为其中一个逗号表示某事,我们会发现时钟上电时会发生什么。
苏联集成电路
接下来,我将讨论时钟中使用的集成电路。时钟主要由 TTL 集成电路(一种在 1970 年代至 1990 年代很流行的数字逻辑)制成。(如果您做过业余数字电子产品,您可能知道 7400 系列 TTL 芯片。)TTL 芯片快速,便宜且可靠。但是,它们的主要缺点是 TTL 芯片没有太多功能。一个基本的 TTL 芯片仅包含几个逻辑门,例如 4 个 NAND 门或 6 个反相器,而更复杂的 TTL 芯片实现了一个功能单元,例如 4 位计数器。最终,TTL 输给了 CMOS 芯片(现代计算机中的芯片),而 CMOS 芯片功耗更低,密度更高。
由于联盟号时钟中的每个芯片执行得并不多,因此该时钟需要许多芯片板才能执行其功能。例如,时钟的每个数字都需要一个计数器芯片,以及几个逻辑芯片以根据需要递增和清除该数字,还需要一个芯片来驱动相关的 7 段 LED 显示器。由于时钟显示 10 位数字,因此已经有 40 个芯片。其他芯片可处理按钮和开关,实现警报,跟踪秒表状态,运行振荡器等,从而使总数超过 100 个芯片。
关于苏联集成电路的一件好的点是,零件号是根据一种合理的系统分配的,这与美国集成电路的本质上随机编号不同。零件号中的两个字母表示芯片的功能,例如逻辑门,计数器,触发器或解码器。例如,下面的 IC 被标记为 “Δ134ΛБ2A”。序列号 134 表示该芯片是低功耗 TTL 芯片。“Л”(L)表示逻辑芯片(Логические),“ЛБ” 表示 NAND / NOR 逻辑门。最后,“ 2” 表示ЛБ类别中的特定芯片。(134ЛБ2 芯片的功能是两个 4 输入与非门和一个反相器,该芯片没有美国同类产品。)
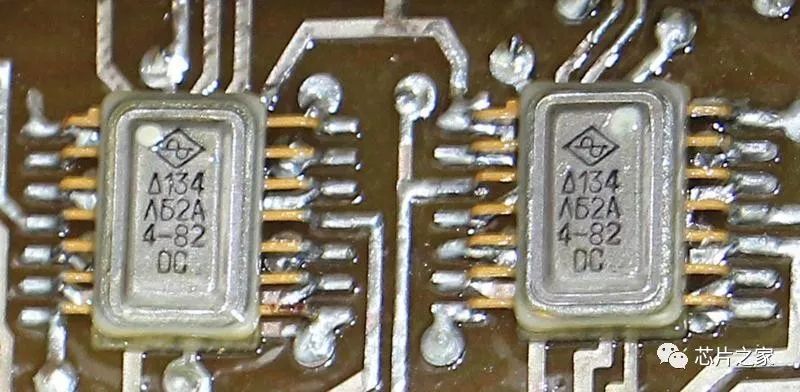
时钟内部有两个集成电路
集成电路上的徽标表明它们是由多家公司生产的。下面显示了时钟中的某些芯片,以及制造商的名称及其英文翻译。

与美国技术的比较
联盟号时钟与美国技术相比如何?当我第一次看时钟时,我会猜想它是在 1969 年而不是 1984 年制造的,这是基于其构造和大量简单的扁平包装芯片而定的。相比之下,1984 年的美国技术生产了 IBM PC / AT 和 Apple Macintosh。在美国生产单芯片数字手表十年后,时钟使用装满 TTL 芯片的电路板似乎是荒谬的。然而,结果却并非如此简单。
为了将联盟号时钟与 1980 年代的当代美国太空电子产品进行比较,我查看了航天飞机 AP-101S 计算机的一块板子。下图显示了联盟号时钟(左)和航天飞机计算机(右)的电路。尽管 Shuttle 计算机在技术上更先进,但差距比我预期的要小。两种系统都是由 TTL 芯片构建的,尽管 Shuttle 计算机使用的芯片速度更快,许多 Shuttle 芯片稍微复杂一些。注意板子顶部较大的 20 针芯片。大白芯片要复杂得多。这是 AMD Am2960 内存纠错芯片。Shuttle 的印刷电路板更先进,具有多层而不是两层,从而使芯片的封装密度提高了 50%。当时,苏联的集成电路技术估计比西方落后大约 8 至 9 年。 这与我在两块板之间看到的差异是一致的。
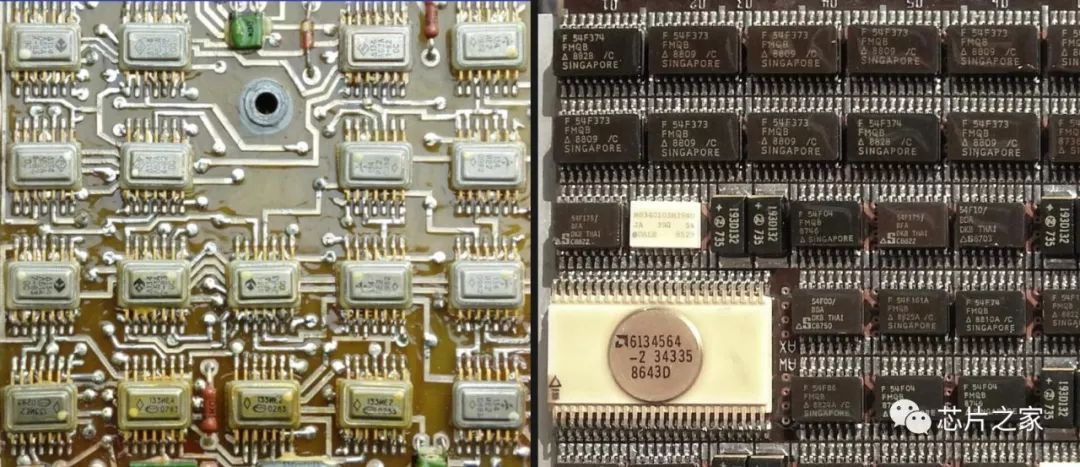
相同比例下联盟号时钟版与航天飞机计算机版
但是,令人惊讶的是,航天飞机计算机和苏联时钟之间的相似之处。我期望 Shuttle 计算机使用 1980 年代的微处理器,并且比 Soyuz 时钟领先一代,但是相反,两个系统都使用 TTL 技术,并且在许多情况下使用的芯片具有几乎相同的功能。例如,两个板均使用实现四个 NAND 门的芯片。(看看是否可以在左侧找到 134ΛБ1A 芯片,在右侧找到 54F00。)
为什么联盟号时钟包含 100 多个芯片而不是用单个时钟芯片实现?苏联集成电路技术比美国技术落后大约 8 年,而 TTL 芯片在当时是一个合理的选择,即使在美国也是如此。由于每个 TTL 芯片的工作量都不大,因此需要一块装满芯片的电路板来实现如此简单的时钟。
排版:晓宇
via:
-
上世纪苏联联盟号宇宙飞船内部时钟电路原创 晓宇 芯片之家 2020年01月20日 17:31

















 3369
3369

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









