






效果图
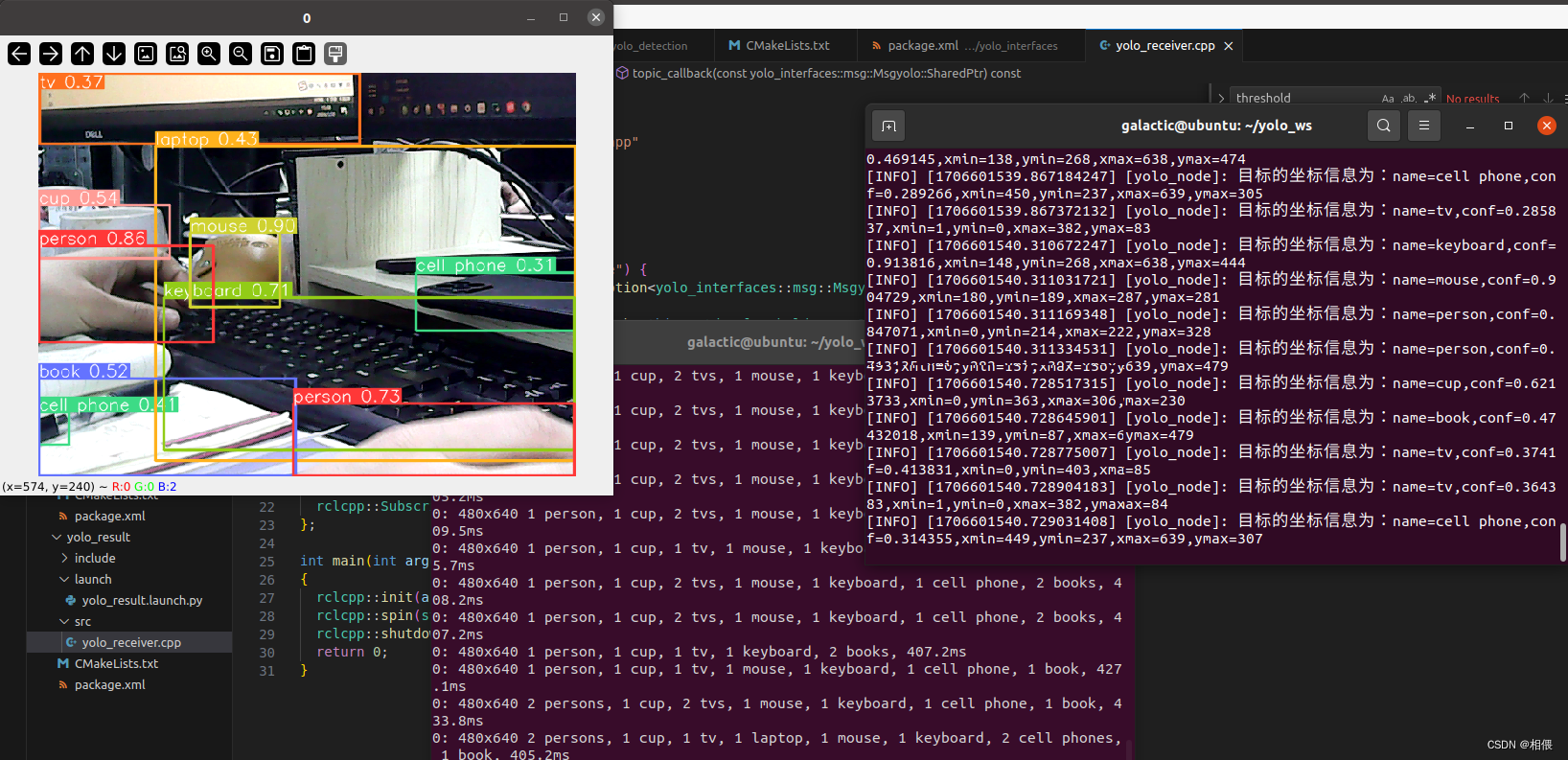
- 用yolov8实时检测物体,包括物体的类别,置信度和坐标
- 通过ros2发布出去
自定义消息
int64 xmin
int64 ymin
int64 xmax
int64 ymax
float32 conf
string name
发布端代码
from ultralytics import YOLO
import cv2
import rclpy
from yolo_interfaces.msg import Msgyolo
def main(args=None):
rclpy.init(args=args)
node = rclpy.create_node('yolo_pub')
pub = node.create_publisher(Msgyolo, 'msgyolo', 10)
model = YOLO("/home/galactic/yolo_ws/src/yolo_detection/resource/yolov8m.pt")
while rclpy.ok():
results = model.predict(source=0, show=True, stream=True)
for r in results:
preds = r.boxes.xyxy.cpu().numpy().astype('uint32')
for index, pred in enumerate(preds):
cl = int(r.boxes.cls[index].item())
# print('......', int(pred[0]), int(pred[1]), int(pred[2]), int(pred[3]))# 坐标位置
# print('name = ', r.names[cl])# 分类名称
# print('conf = ', r.boxes.conf[index])# 置信度
msg = Msgyolo()
msg.xmin = int(pred[0])
msg.ymin = int(pred[1])
msg.xmax = int(pred[2])
msg.ymax = int(pred[3])
msg.conf = float(r.boxes.conf[index])
msg.name = r.names[cl]
pub.publish(msg)
rclpy.spin_once(node)
rclpy.shutdown()
订阅端代码
#include <rclcpp/rclcpp.hpp>
#include "yolo_interfaces/msg/msgyolo.hpp"
using namespace std::chrono_literals;
class YoloNode : public rclcpp::Node
{
public:
explicit YoloNode() : Node("yolo_node") {
subscriber_ = this->create_subscription<yolo_interfaces::msg::Msgyolo>(
"msgyolo", 10,
std::bind(&YoloNode::topic_callback, this, std::placeholders::_1));
}
private:
void topic_callback(const yolo_interfaces::msg::Msgyolo::SharedPtr msg) const
{
RCLCPP_INFO(this->get_logger(), "目标的坐标信息为:name=%s,conf=%f,xmin=%d,ymin=%d,xmax=%d,ymax=%d",
msg->name.c_str(), msg->conf, msg->xmin, msg->ymin, msg->xmax, msg->ymax);
}
rclcpp::Subscription<yolo_interfaces::msg::Msgyolo>::SharedPtr subscriber_;
};
int main(int argc, char * argv[])
{
rclcpp::init(argc, argv);
rclcpp::spin(std::make_shared<YoloNode>());
rclcpp::shutdown();
return 0;
}
















 3934
3934











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









