







1. 单目相机
1.1 摄像头原理
视频网址:【全网最详细】摄像头原理分析(约25分钟课程)
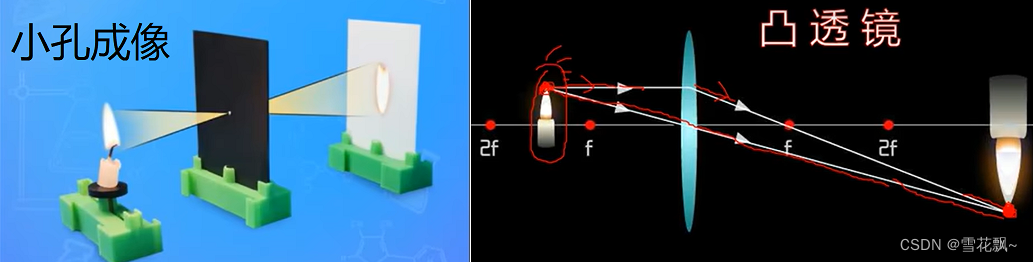
要点: 小孔成像、凸透镜和焦距(相机清晰度及调焦)
1.2 单目相机的标定
视频网址:【单目相机如何标定】(约4分钟简约介绍)
其实就是用棋盘格纸求相机的内、外参矩阵,具体方法可自学张正友标定法。
博文网址:相机标定之张正友标定法数学原理详解(含python源码) - 知乎
要点: 最好有数字图像处理专业课基础,这样博文读起来才比较容易理解。我是有相关基础,又接触了多年机器学习,现在回归头来再次阅读,便醍醐灌顶、茅塞顿开、认识有了新的提升。注意,第一次求出来的内、外参和畸变参数仅作为初始参数,还要像梯度下降法一样进行多次迭代优化才能得到近似最优解。
博文网址:SLAM入门之视觉里程计(6):相机标定 张正友经典标定法详解 - Brook_icv - 博客园
要点: 这部分基础非常重要,对后面学习RGB-D相机原理有巨大作用。
2 双目相机
2.1 双目相机定位原理
视频网址:【全网最详细】双目摄像头原理分析】(约5分钟课程)
博文网址:深度相机之双目成像
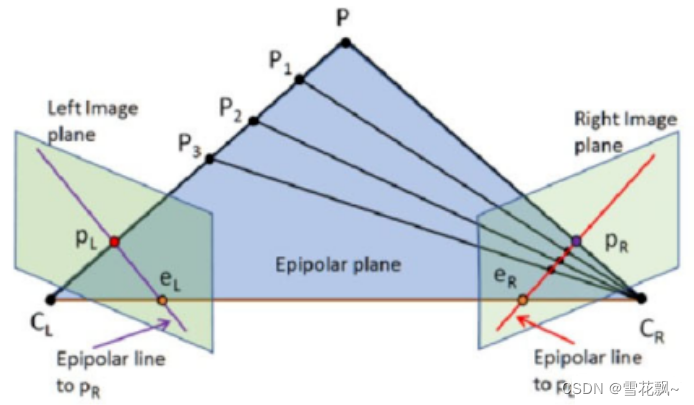
要点: 简单理解一下即可。以下图为例, P P P点在左边相机 C L C_L CL的成像点为 P L P_L PL,只要在右边相机上找到 P P P的对应匹配特征点,画一条线过去找交叉点即可确定 P P P点的3D位置。在 C R C_R CR上全图两两匹配比较耗时。注意,射线 C L P C_L P CLP上的点 P 3 P_3 P3、 P 2 P_2 P2、 P 1 P_1 P1和 P P P在右边相机 C R C_R CR的成像点分别为红线上的4个点,利用该约束关系,不用全局两两匹配,可以直接在红线上进行两两匹配,大幅度减少了匹配范围。
2.2 双目相机的缺陷
双目相机进行定位需要先实现特征点匹配,这个过程比较困难。以上图为例,假如 P R P_R PR和红线上的点长得很相似,那么 P L P_L PL有可能与红线上的其他点进行误匹配,从而造成定位误差。RGB-D相机通过结构光的空间调制或时间调制解决上述问题。
3 RGB-D相机
3.1 深度相机结构光原理
视频网址:【全网最详细】RGB-D相机原理分析(约21分钟课程)
要点: 这个视频讲的比较清楚,要反复来回看几遍进行理解。视频里有些用词不是很准确,例如“密码”。看完视频,要思考一个问题,如何对齐RGB图像和深度图像? 注意,先学好线性代数和数字图像处理基础知识 (^ _ ^)
博文地址:Kinect学习(6)——深度图与彩色图配准(学习版2) - 简书
3.2 RGB-D相机的应用
应用有很多,例如:在RGB图像上用YOLOv4定位出目标物,然后对齐至深度图像上,实现3D定位。















 1603
1603











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









