一、Mat类的综述
1、Mat类存储图像
Mat类是OpenCV里使用广泛的一个类,其中我认为最重要的一个作用就是作为存储图像的数据结构。那么Mat类如何存储的图像呢?
我们都知道图像分为彩色图像和灰度图像,这里我有一个误区,一直认为彩色图像是一种三维矩阵,就是立方体的那种结构,一个图像分为三层。
但是这种理解是错误的,是错误的,是错误的!
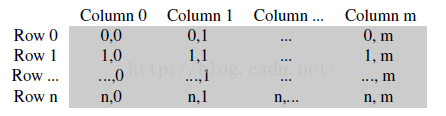
其实在存储的图像不管是彩色的还是灰度图像,都是二维的矩阵,具体的存储格式如下
(1)灰度图像的格式:
(2)彩色图像的格式:
看到了吗,虽然彩色图像由BGR三个通道,但是是存储在同一个平面内的,只不过OpenCV在这里把三列才当作一列,因此有img.cols等于图像的列数。
一般我们用Opencv读取的灰度图像的数据类型为uchar类型的,而彩色图像的一个像素的数据类型为<Vec3b>类型的,灰度图一个像素占用1个字节,而彩色图像一个像素3个字节。
接下来就引出了我们如何按像素读取图像呢?
2、Mat按像素读取图像内容
这里主要介绍两种方法,一种非常简单,易于编程,但是效率会比较低;另外一种效率高,但是不太好记。下面依次看代码:
(1)易于编程的
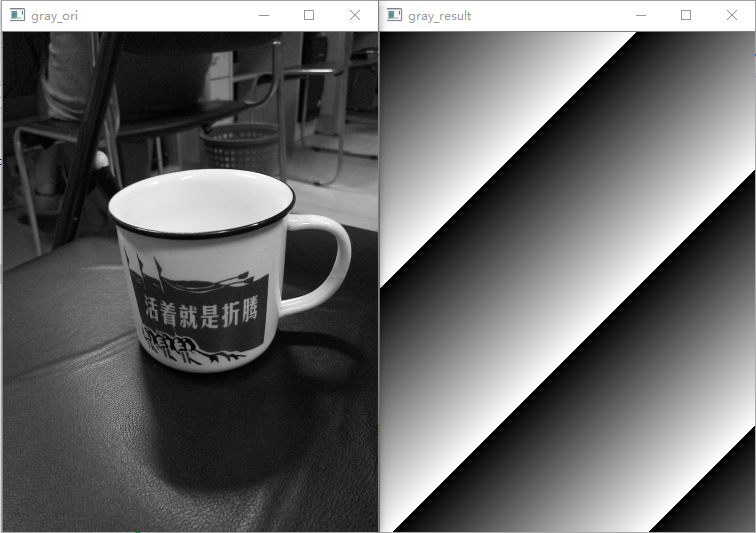
对于灰度图像进行操作:
- #include <opencv2\core\core.hpp>
- #include <opencv2\imgproc\imgproc.hpp>
- #include <opencv2\highgui\highgui.hpp>
- #include <iostream>
-
- using namespace std;
- using namespace cv;
-
- int main()
- {
- Mat img = imread("1.jpg");
- resize(img, img, Size(375, 500));
- cvtColor(img, img, CV_RGB2GRAY);
- imshow("gray_ori", img);
- for (int i = 0; i < img.rows; i++)
- {
- for (int j = 0; j < img.cols; j++)
- {
-
- img.at<uchar>(i, j) = i+j;
- }
- }
- imshow("gray_result", img);
- waitKey(0);
- return 0;
- }
结果图如下:
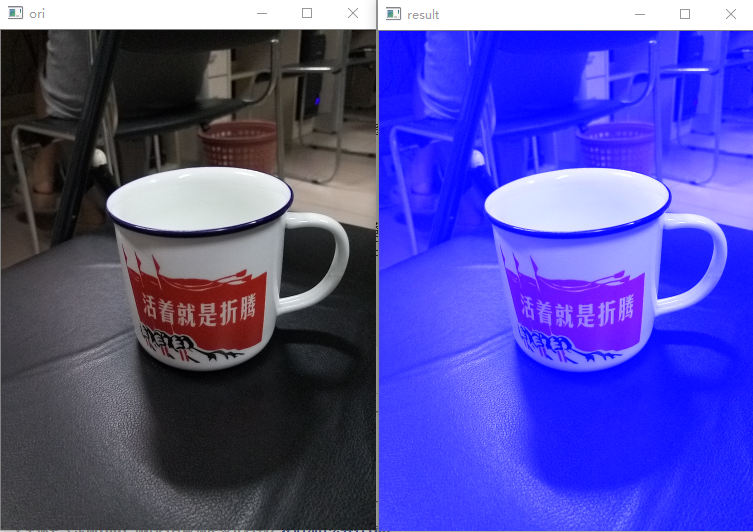
可以看出,使用at的操作很容易定位,就跟操作一个普通的二维数组一样,那么对于彩色图像呢,方法很简单,只需要把at<类型>中的类型改变为Vec3b即可,代码如下:
- #include <opencv2\core\core.hpp>
- #include <opencv2\imgproc\imgproc.hpp>
- #include <opencv2\highgui\highgui.hpp>
- #include <iostream>
-
- using namespace std;
- using namespace cv;
-
- int main()
- {
- Mat img = imread("1.jpg");
- resize(img, img, Size(375, 500));
- imshow("ori", img);
- for (int i = 0; i < img.rows; i++)
- {
- for (int j = 0; j < img.cols; j++)
- {
-
- img.at<Vec3b>(i, j)[0] = 255;
-
-
- }
- }
- imshow("result", img);
- waitKey(0);
- return 0;
- }
效果图如下:
(2)采用指针对图像进行访问
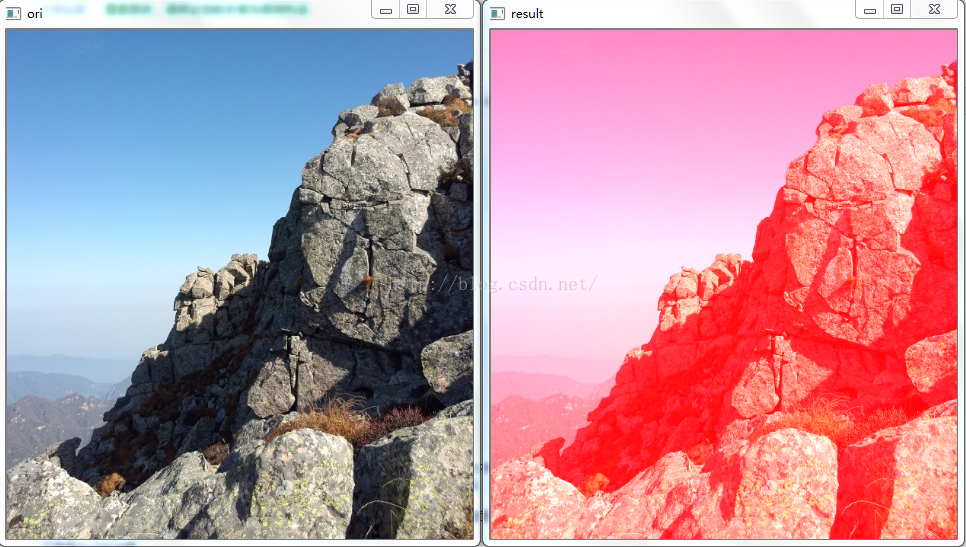
这里直接写对于彩色图像的操作:
- #include <opencv2\highgui\highgui.hpp>
- #include <opencv2\imgproc\imgproc.hpp>
- #include <opencv2\core\core.hpp>
- #include <iostream>
-
- using namespace cv;
- using namespace std;
- int main()
- {
- Mat img = imread("1.jpg");
- int rows = img.rows;
- int cols = img.cols * img.channels();
- if(img.isContinuous())
- {
- cols = cols * rows;
- rows = 1;
- }
- imshow("ori",img);
- for(int i = 0;i<rows;i++)
- {
-
- uchar *pointer = img.ptr<uchar>(i);
-
- for(int j = 0;j<cols;j += 3)
- {
-
-
- pointer[j+2] = 255;
- }
- }
- imshow("result",img);
- waitKey();
- return 0;
- }
从上面个的代码中可以很明显的看出我们是如何操作图像的数据以及图像在Mat中的存放格式的,就是我们上面那个彩色图像的存放示意图中的格式,这里把彩色图像中的一个像素点分成三份,每一份都是uchar类型,因此我们这里不需要使用Vec3b数据类型。把彩色图像看成一个rows * (cols * channels)的二维数组进行操作,其中的每个元素的类型都是uchar类型。
这里需要注意的是j += 3是因为我们按照一个像素点进行操作,而一个像素点在这里面又被分成三份,因此需要j += 3,如果是灰度图像则直接j++即可
这种操作方式虽然复杂一些,但是执行效率会比上面的算法高很多。
下面是执行的结果:
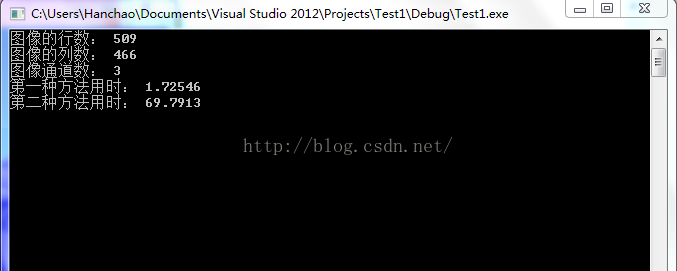
下面我们给出这两种方式进行同一操作的时间对比图():
测试代码如下:
- #include <opencv2\highgui\highgui.hpp>
- #include <opencv2\imgproc\imgproc.hpp>
- #include <opencv2\core\core.hpp>
- #include <iostream>
- #include <time.h>
-
- using namespace cv;
- using namespace std;
- int main()
- {
- Mat img = imread("1.jpg");
- Mat img2;
- img.copyTo(img2);
-
- cout<<"图像的行数: "<<img.rows<<endl;
- cout<<"图像的列数: "<<img.cols<<endl;
- cout<<"图像通道数: "<<img.channels()<<endl;
-
- double time1;
- time1 = (double)getTickCount();
-
- int rows = img.rows;
- int cols = img.cols * img.channels();
- if(img.isContinuous())
- {
- cols = cols * rows;
- rows = 1;
- }
-
- for(int i = 0;i<rows;i++)
- {
-
- uchar *pointer = img.ptr<uchar>(i);
-
- for(int j = 0;j<cols;j += 3)
- {
-
-
- pointer[j+2] = 255;
- }
- }
- time1 = 1000 * ((double)getTickCount() - time1) / getTickFrequency();
-
- cout<<"第一种方法用时: "<<time1<<endl;
-
- double time2 = (double)getTickCount();
- for (int i = 0; i < img2.rows; i++)
- {
- for (int j = 0; j < img2.cols; j++)
- {
-
- img2.at<Vec3b>(i, j)[0] = 255;
-
-
- }
- }
- time2 = 1000 * ((double)getTickCount() - time2)/getTickFrequency();
- cout<<"第二种方法用时: "<<time2<<endl;
- imshow("img",img);
- imshow("img2",img2);
- waitKey(0);
- return 0;
- }
2、Mat类中的变量参数
Mat类中包含了很多的变量,比如用的比较多的rows,cols等,这些我在这里就不总结了。
这里总结的是Mat类中用的比较少的几个变量和函数,step1(),step[],size,elemSize和elemSize1。
step1(i)表示的是Mat中的每一维的通道数;
step[i]表示的是Mat中的每一维的大小,以字节为单位;
size[i]表示的是Mat中元素的个数;
elemSize()表示的是每个元素的大小
,以字节为单位;
elemSize1()表示的一个元素中每个通道的大小,以字节为单位。
这么说恐怕不好理解,我们用代码进行测试:
- #include <opencv2\highgui\highgui.hpp>
- #include <opencv2\imgproc\imgproc.hpp>
- #include <opencv2\core\core.hpp>
- #include <iostream>
- #include <time.h>
-
- using namespace cv;
- using namespace std;
- int main()
- {
- Mat img = imread("1.jpg");
- cout<<"img.rows: "<<img.rows<<" img.cols: "<<img.cols<<" img.channels(): "<<img.channels()<<endl;
- cout<<"###############################################"<<endl;
- cout<<"img.step1(0): "<<img.step1(0)<<endl;
- cout<<"img.step1(1): "<<img.step1(1)<<endl;
- cout<<"img.step[0]: "<<img.step[0]<<endl;
- cout<<"img.step[1]: "<<img.step[1]<<endl;
- cout<<"img.size[0]: "<<img.size[0]<<endl;
- cout<<"img.size[1]: "<<img.size[1]<<endl;
- cout<<"img.elemSize(): "<<img.elemSize()<<endl;
- cout<<"img.elemSize1(): "<<img.elemSize1()<<endl;
- return 0;
- }
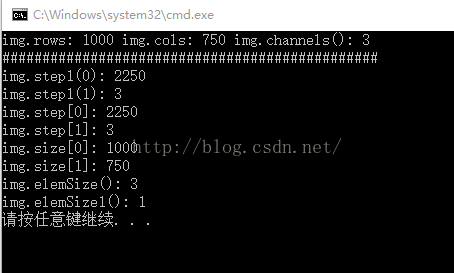
看一下结果:
可以看出这是一张1000*750的彩色图像。以上面所说,step1(i)表示的每一维的通道数,我们知道彩色图像存储方式是一种二维矩阵,因此只有两维,其中最后一维表示的是一个点,前面一维表示的是线,如果有第三维,那么再前面一维表示的是面。这里有一个规律,就是最后一维一定是点,其他的依次往前推就可以了。
接着分析结果,img.step1(1)表示的是一个点的通道数,我们知道彩色图像的一个像素,通道数为3(BGR),因此img.step1(1) = 3,而img.step1(0)是一行的像素的通道数,因此为750*3 = 2250
而step[i]表示的是每一维中的大小,以字节计数,在彩色图像中一个像素分为三块,每一块为一个字节,因此step[0] = 2250 ,step[1] = 3
size表示的是每一维元素的大小,注意这里是元素,即像素,size[0]表示rows,size[1]表示cols
elemSize表示的是每个元素的大小,以字节计,一个元素分为三块,一块是1字节,因此为3(彩色图像)
elemSize1表示的是一个元素的每个通道的大小,因此为1
























 1709
1709

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









