






电子手轮Ver1.1(位置跟随,X轴或Y轴)
1.200smart、威纶通触摸屏
2.手轮或编码器+PLC+伺服驱动器
3.手轮接入PLC,伺服接Q0.0或Q0.1,手轮转动,伺服电机准确跟随。
4.采用PLS指令编写
5.不带加减速
6.可选择X轴或Y轴跟随手轮。
YID:9145683917917476
sunny
手轮与伺服的位置跟随:一场无加减速的精确舞蹈
电子设备的世界中,每一份操作都与算法的微妙息息相关。今天,我们来讲一讲如何通过一个简练的架构来实现手轮对伺服的位置跟随。
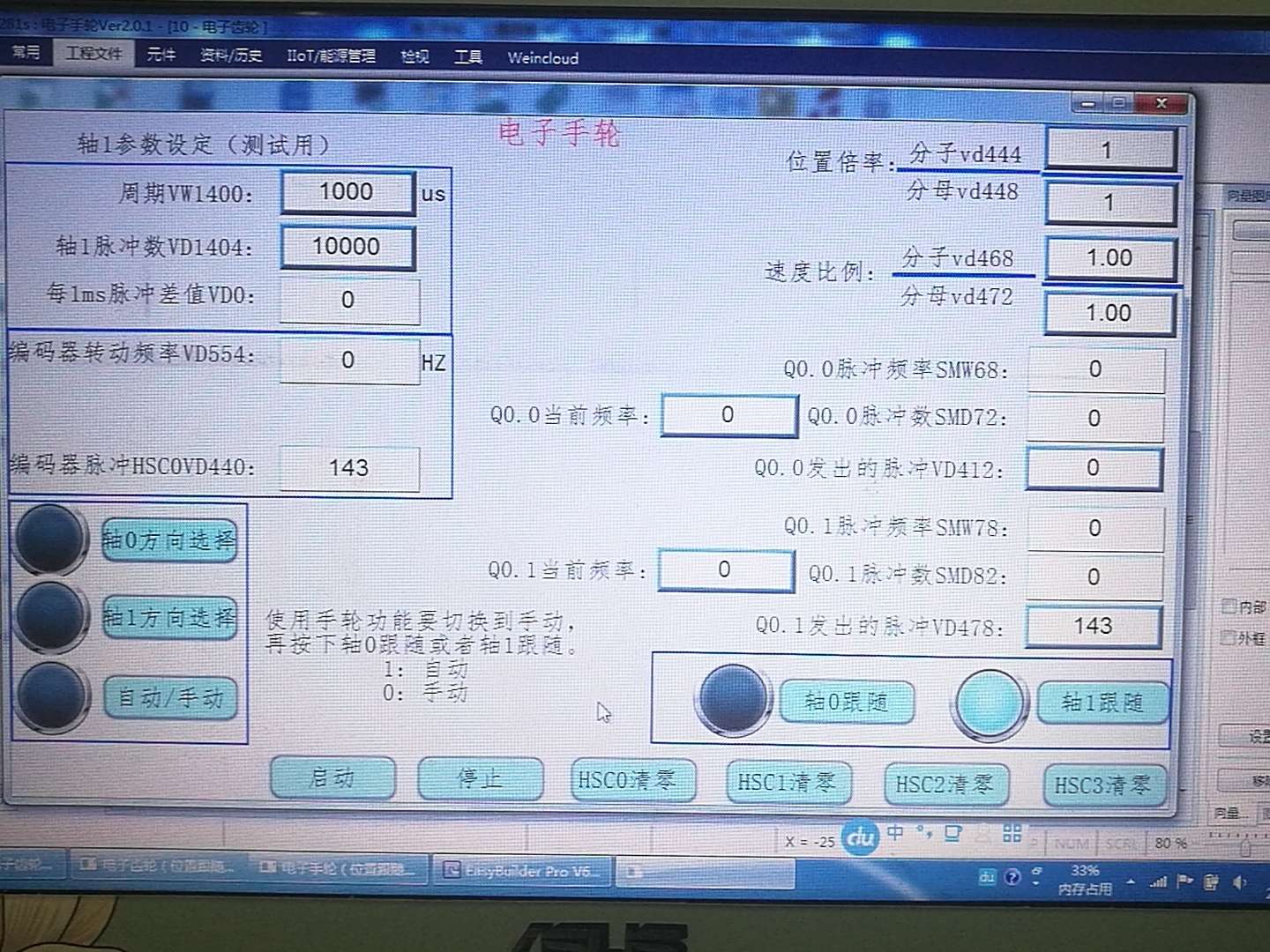
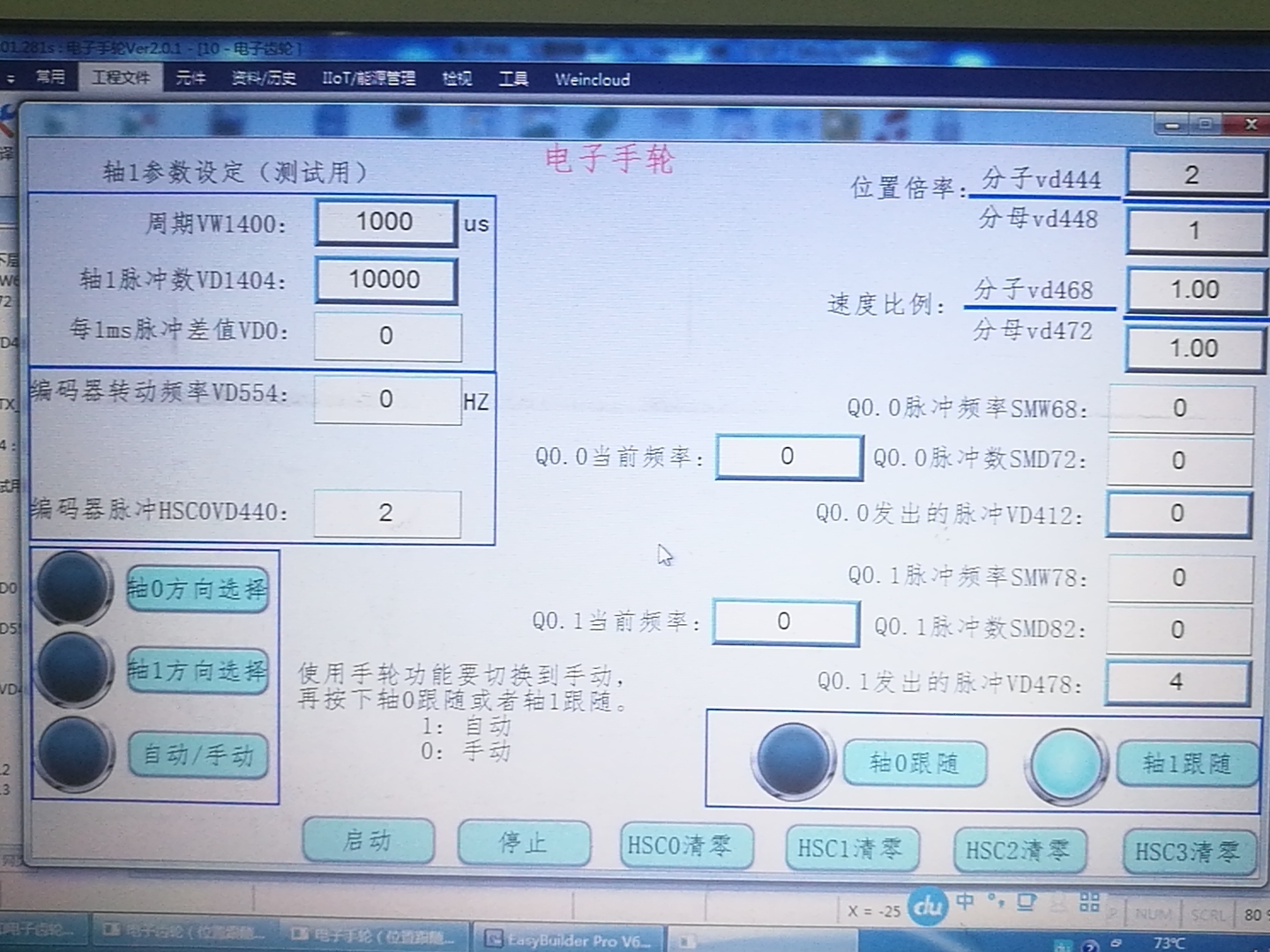
在Ver1.1的电子手轮中,我们面临了怎样的挑战呢?那就是如何让位置跟随更加精准,尤其是在X轴或Y轴上的操作。我们手头有的工具包括1.200smart和威纶通触摸屏,还有手轮或编码器、PLC以及伺服驱动器。接下来,让我们舞动代码的笔触,开始这场精准的舞蹈。
一、手轮与PLC的握手
首先,手轮接入PLC。在操作界面上,用户的每一次转动都会被手轮精准地捕捉并传递给PLC。想象一下,这就像是在邀请舞伴跳舞,手轮是舞者的手,而PLC则是舞伴的另一只手。每一次的转动和接收都是他们之间无声的交流。
二、伺服驱动器的舞步
伺服电机接收到Q0.0或Q0.1的信号后,就会开始它的舞步。当手轮被转动时,伺服电机就像是被指挥的舞者,根据接收到的信号准确地进行位置跟随。这其中的关键在于信号的准确传递和电机的快速响应。
三、PLS指令的编舞
采用PLS指令来编写程序,就如同一位熟练的编舞家在编排这场精确的舞蹈。PLS指令确保了信号的稳定传递,没有加减速的过程,让整个更加简洁而高效。
四、选择X轴或Y轴的决定
在实际操作中,我们可以根据需要选择X轴或Y轴跟随手轮。这样的设计给予了操作更大的灵活性,使得设备可以适应不同的工作场景和需求。
五、实战中的代码片段
让我们看看一段简化的代码示例:
// 手轮信号读取
signal = read_handwheel_signal(); // 读取手轮信号
// 根据信号控制伺服驱动器
if (signal_valid) { // 判断信号是否有效
if (choose_axis == 'X') { // 选择X轴跟随
// 发送信号到X轴伺服驱动器Q0.0
send_to_servo(Q0.0, signal);
} else if (choose_axis == 'Y') { // 选择Y轴跟随
// 发送信号到Y轴伺服驱动器Q0.1
send_to_servo(Q0.1, signal);
}
}
这段代码简洁而有力,完美地诠释了整个的工作流程。通过与实际硬件设备的交流和反馈,确保了手轮的位置跟随操作精确而稳定。
电子手轮与伺服的这场“舞蹈”不仅是技术的展示,更是人类智慧与机器的完美结合。在每一次的转动中,我们都能感受到技术的力量和无限的可能性。让我们继续探索,在技术的海洋中留下更多的足迹吧!
深度剖析有见地: https://pan.baidu.com/s/1LESXWGd3jXZlCWB8VZAhCw?pwd=e7uy
















 910
910

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









