






Categorical Depth Distribution Network for Monocular 3D Object Detection
1. 论文信息
论文标题:Categorical Depth Distribution Network for Monocular 3D Object Detection
作者单位:University of Toronto Robotics Institute
代码:TRAILab/CaDDN
论文:https://arxiv.org/pdf/2103.01100.pdf
2. 摘要
单目3D目标检测是自动驾驶里面的关键问题,因为和典型的多源传感器系统相比它提供了一个简单的配置。单目3D检测的主要挑战在于准确地预测目标的深度,由于缺乏直接的距离测量,必须从目标和场景线索中推断出目标深度。许多方法尝试直接估计深度来辅助3D检测,但由于深度的不准确性能有限。我们提出的方法,分类深度分布网络(CaDDN)对每一个像素使用了一个预测分类深度分布来将丰富的上下文特征信息投影到三维空间中适当的深度间隔.。接着我们使用计算高效的BEV投影和单极探测器来产生最终输出检测结果。我们用我们的方法在KITTI 3D object detection benchmark数据集上进行交叉验证,在公开的单目方法中我们排行第一。我们也提供了第一个基于Waymo公开数据集的单目3D检测。CaDDN的源代码将会在出版前公开。
3. 创新点
-
Categorical Depth Distributions 分类深度分布
-
end to end 端到端的深度估计
-
BEV场景解释
4. 网络模型架构图
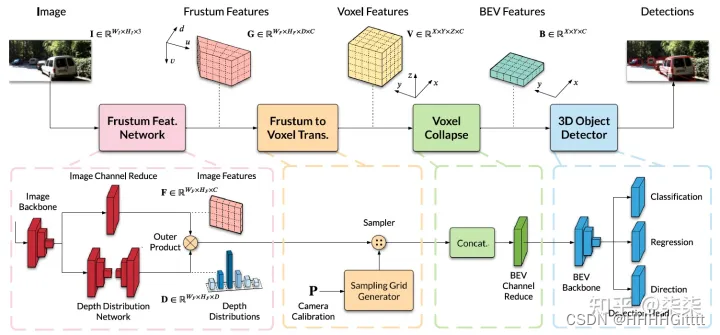
该网络由三个模块来生成三维特征表示,一个模块进行3D detection。将图像I生成的Frustum特征G,和估计的深度分布D结合。将其转换为体素特征v,将体素特征堆叠到bird s-eye-view特征B中,用于3D object detection。














 962
962











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









