






mpc模型预测控制从原理到代码实现
mpc模型预测控制详细原理推导
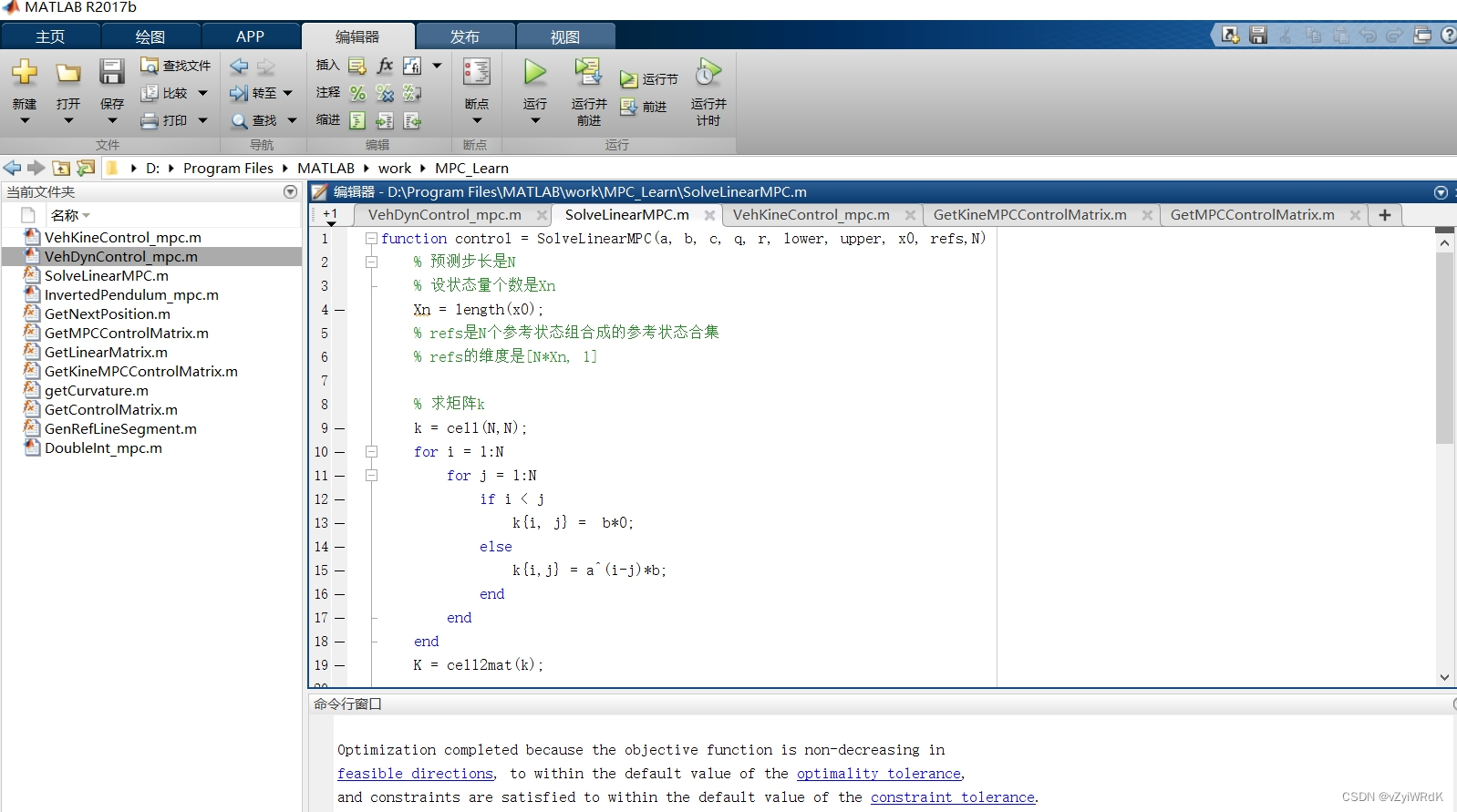
matlab和c++两种编程实现
四个实际控制工程案例:
双积分控制系统
倒立摆控制系统
车辆运动学跟踪控制系统
车辆动力学跟踪控制系统
包含上述所有的文档和代码。
MPC模型预测控制从原理到代码实现
MPC模型预测控制是一种高级控制技术,它能够通过对系统未来行为的预测来实现对系统的控制,因此被广泛应用于各种需要高精度控制的场景,比如机器人控制、飞行器控制、汽车控制等。在本篇文章中,我们将会详细地介绍MPC模型预测控制的原理以及如何使用Matlab和C++两种编程语言来实现MPC控制器。同时,我们还将提供四个实际控制工程案例,分别是双积分控制系统、倒立摆控制系统、车辆运动学跟踪控制系统和车辆动力学跟踪控制系统。在这些案例中,我们将会根据实际应用需求来演示MPC模型预测控制的实现方法,并提供相应的文档和代码。
一、MPC模型预测控制详细原理推导
MPC模型预测控制的核心思想是通过对系统未来的一系列状态预测,来确定当前时刻的最优控制策略。具体来说,MPC将控制问题转化为优化问题,通过求解最优化问题得到当前时刻的最优控制指令。MPC的控制策略可以被描述为以下三个步骤:
- 预测模型建立
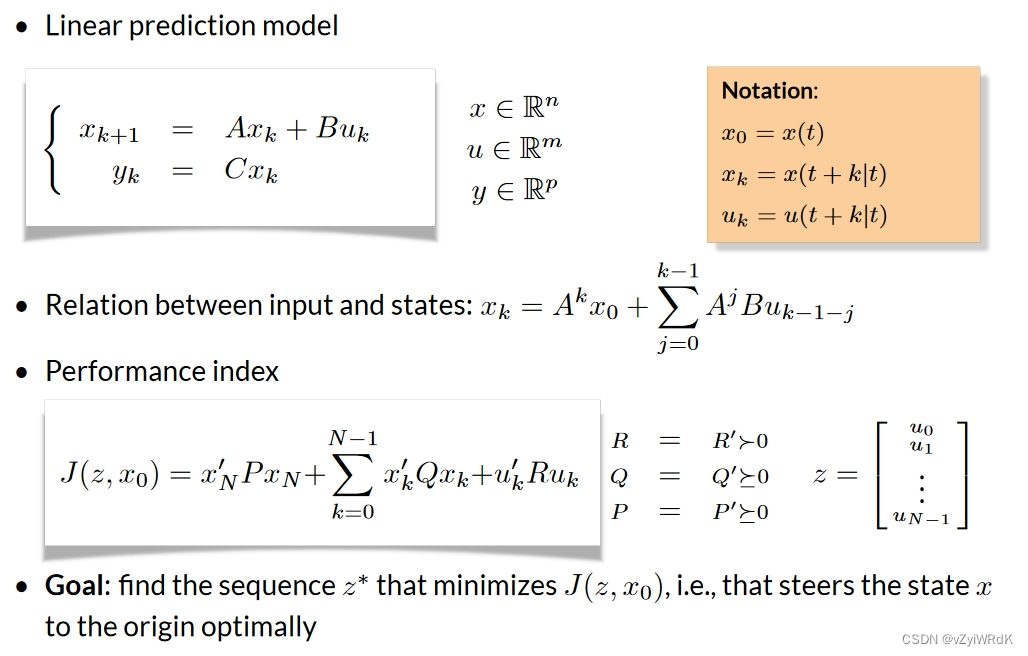
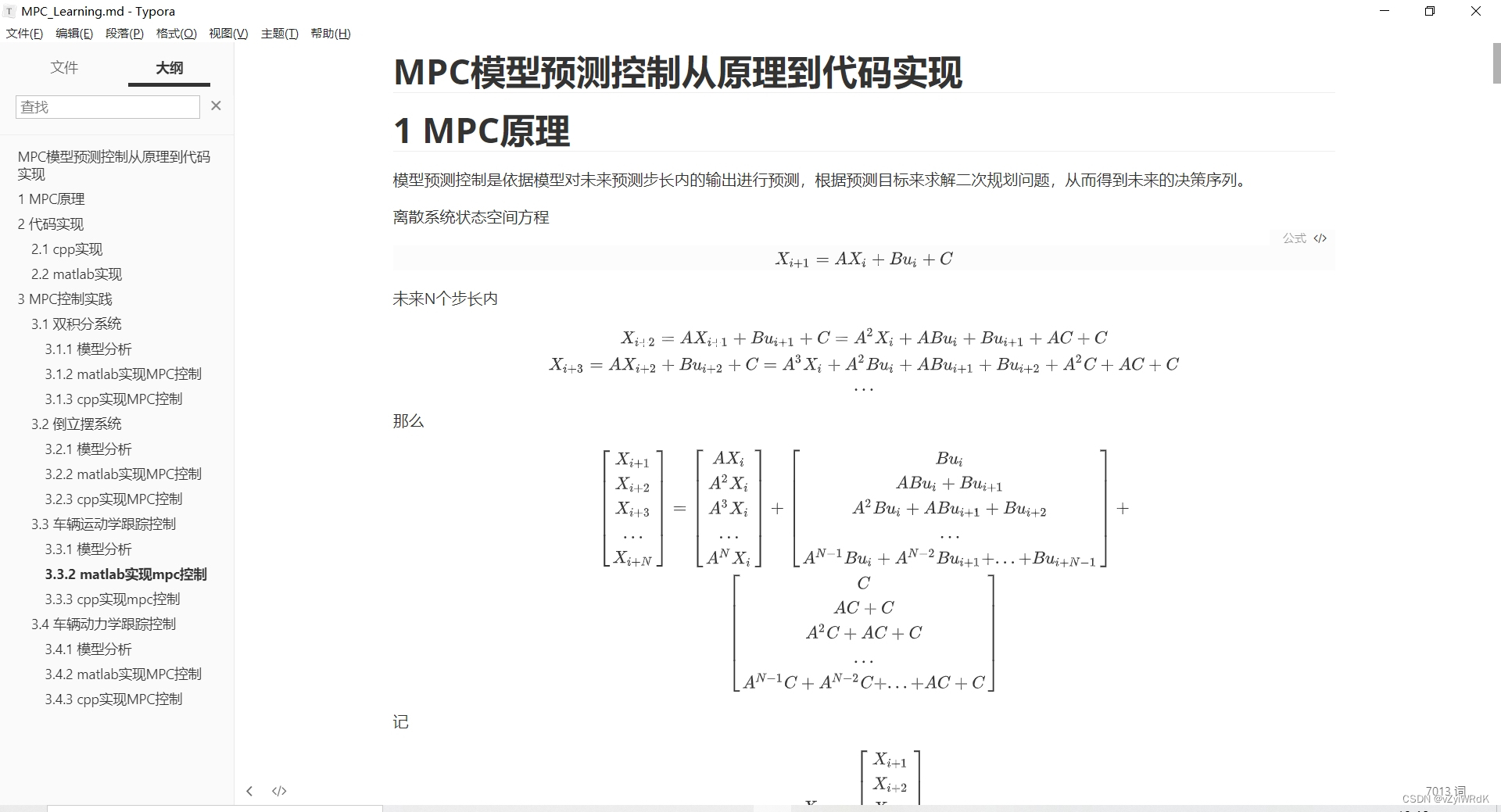
MPC将系统建模为一个多变量动态系统,可以使用常见的状态空间法来建立模型。在建立模型时,需要考虑系统的变量、输入、输出、约束条件等因素,并确定系统的状态向量和输入向量,以及它们之间的关系。模型建立完成后,需要在系统的当前状态下进行预测,并得到一个未来一段时间内的状态序列和输入序列。
- 优化问题建立
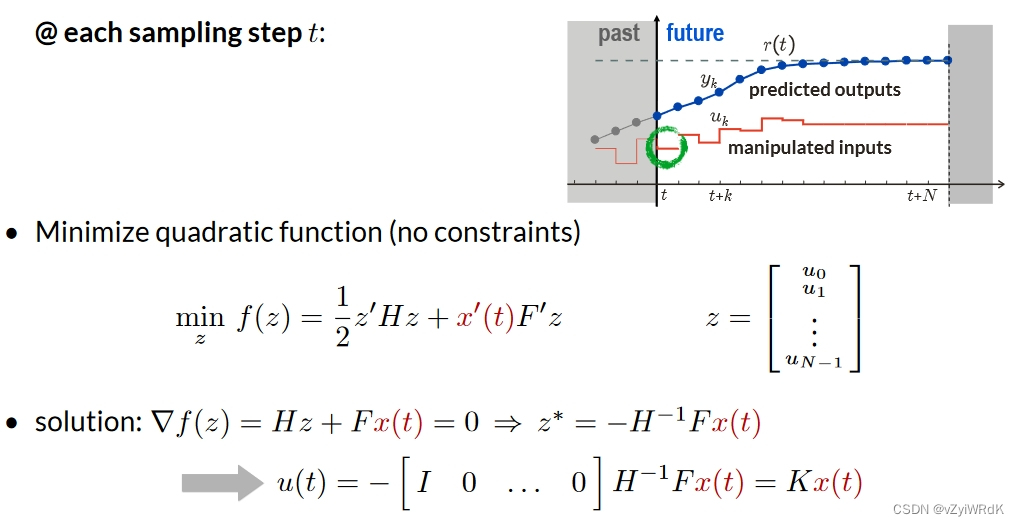
在得到未来一段时间内的状态序列和输入序列之后,MPC将控制问题转化为一个优化问题。该问题的目标是寻找符合系统约束条件的最优控制输入序列,使得预测时间内的系统状态能够尽量接近于期望的轨迹。优化问题通常可以表示为如下的数学形式:
minimize J = Ψ(x(N)) + ∑i=0~N-1 L(x(i),u(i)) subject to x(0) = x(t) x(i+1) = f(x(i),u(i)) i=0,1,...,N-1 u(i) ∈ U(i)
其中,N表示预测的时间步数,x表示系统状态,u表示控制输入,Ψ(x(N))表示终端状态的代价函数,L(x(i),u(i))表示中间状态的代价函数,f(x(i),u(i))表示系统的动力学模型,U(i)表示输入约束。
- 控制指令计算
通过求解上述的优化问题,即可得到未来一段时间内的最优控制输入序列。对于当前时刻,MPC将该最优控制输入序列的第一个元素作为当前时刻的控制指令。
二、Matlab和C++两种编程实现
MPC控制器的实现通常可以使用Matlab或C++来进行编程。这里我们将针对这两种编程语言,分别介绍MPC的实现方法。
- Matlab实现
Matlab是一种常用的科学计算软件,它可以方便地进行矩阵运算和优化求解。因此,在MPC控制器的实现中,Matlab通常被用来进行控制器的建模、仿真和优化求解。
具体来说,在Matlab中实现MPC控制器可以遵循以下步骤:
-
建立系统动态模型,包括状态空间方程和成本函数。
-
设定MPC的参数,包括预测时间步数、控制器权重矩阵、控制输入限制等。
-
进行优化求解,并得到当前时刻的最优控制指令。
-
将最优控制指令作为输入引入系统,计算系统的下一个状态。
-
重复执行2)~4)步骤,直至控制任务完成。
- C++实现
C++是一种高效的编程语言,具有快速执行和优秀的内存管理能力。因此,在需要实时控制的场景下,通常会使用C++来实现MPC控制器。
具体来说,在C++中实现MPC控制器可以遵循以下步骤:
-
建立系统动态模型和成本函数,可以采用离散化方法来将连续时间动态方程转化为离散时间方程。
-
设定MPC的参数,包括预测时间步数、控制器权重矩阵、控制输入限制等。
-
利用优化库(如qpOASES)求解优化问题,并得到当前时刻的最优控制指令。
-
将最优控制指令作为输入引入系统,计算系统的下一个状态。
-
重复执行2)~4)步骤,直至控制任务完成。
三、四个实际控制工程案例
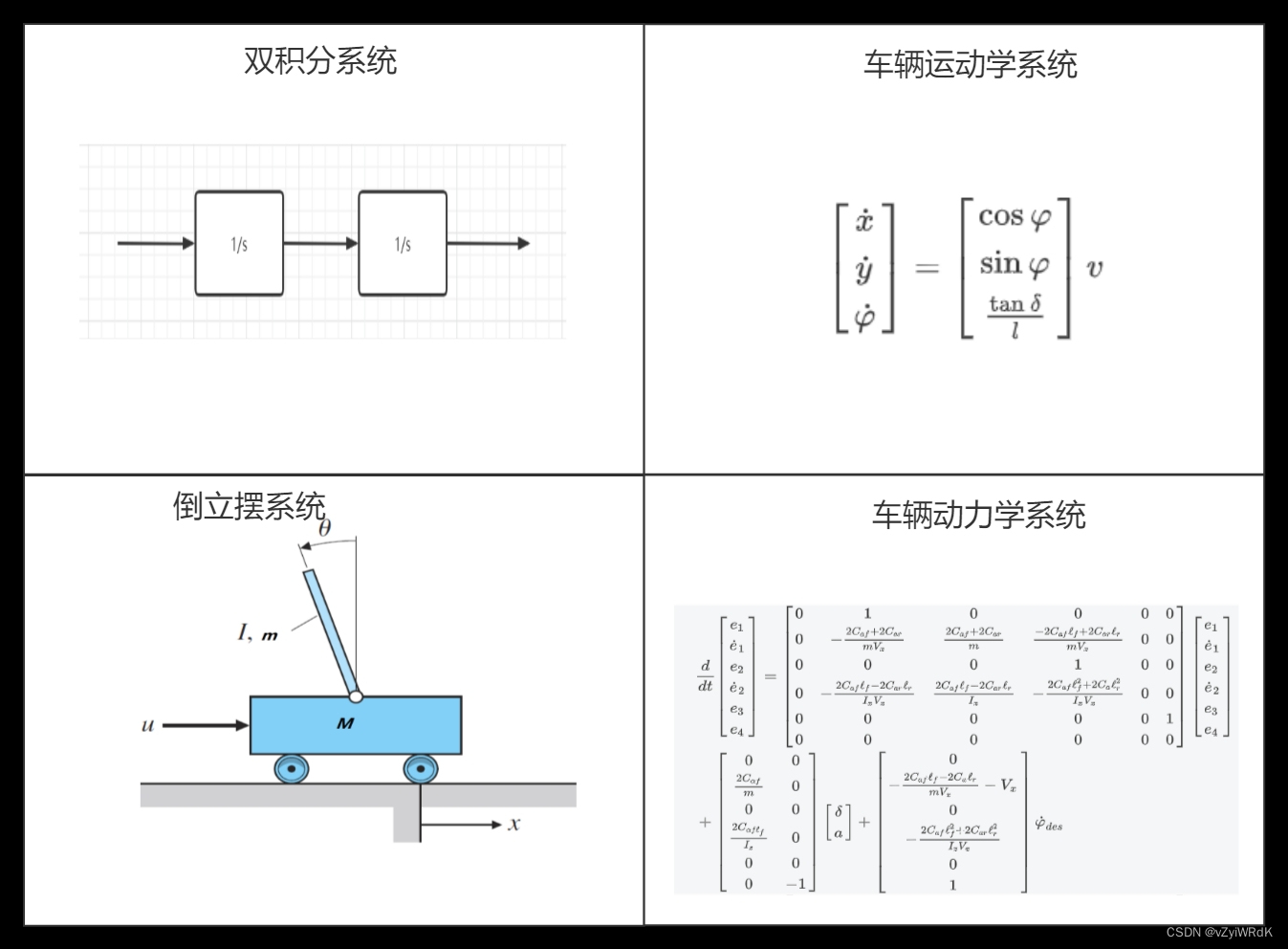
为了演示MPC模型预测控制的应用,我们提供了四个实际控制工程案例,分别是双积分控制系统、倒立摆控制系统、车辆运动学跟踪控制系统和车辆动力学跟踪控制系统。在这些案例中,我们将会根据实际应用需求来演示MPC模型预测控制的实现方法,并提供相应的文档和代码。
- 双积分控制系统
双积分控制系统是一种常见的高精度控制系统,可以用于控制机器人的位置和速度等。在该案例中,我们将使用MPC模型预测控制来实现对双积分控制系统的控制。具体来说,我们将建立系统的动态模型和成本函数,并使用Matlab和C++两种编程语言来实现MPC控制器。最终,我们将会演示如何使用MPC控制器来控制双积分系统的位置和速度。
- 倒立摆控制系统
倒立摆控制系统是一种典型的非线性系统,在控制领域中被广泛应用。在该案例中,我们将使用MPC模型预测控制来实现对倒立摆控制系统的控制。具体来说,我们将建立系统的动态模型和成本函数,并使用Matlab和C++两种编程语言来实现MPC控制器。最终,我们将会演示如何使用MPC控制器来控制倒立摆系统的倾斜角度。
- 车辆运动学跟踪控制系统
车辆运动学跟踪控制系统是一种常见的车辆控制系统,可以用于控制车辆的位置和速度等。在该案例中,我们将使用MPC模型预
相关代码,程序地址:http://lanzouw.top/655344134433.html


















 5060
5060

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









