







1. 引言
在工业控制领域,**模型预测控制(MPC)**是一种先进的控制策略,因其在多变量和复杂系统中的卓越表现而备受关注。相比传统的控制方法,MPC通过预测未来系统行为并优化控制输入,能够实现目标跟踪、约束满足和性能最优。本文将深入探讨MPC的原理、实战应用及其缺点,并以一个详细示例阐释其控制循环,最后简要对比MPC与PID的差异。
2. MPC的核心概念
MPC是一种基于数学模型的优化控制方法,其核心在于利用系统模型预测未来状态,并通过滚动优化动态调整控制输入。以下是MPC的三大关键要素:
预测模型
MPC依赖于系统的数学模型,例如状态空间方程 x(k+1)=Ax(k)+Bu(k) x(k+1) = Ax(k) + Bu(k) x(k+1)=Ax(k)+Bu(k),预测未来多个时间步的状态和输出。这种预测能力使其能够提前规划控制策略。例如,在一个预测时域为10步的系统中,MPC可以预估未来10个时间步的位置和速度。
滚动优化
在每个控制周期内,MPC会求解一个有限时域的优化问题(如最小化误差和控制成本),但只执行优化结果中的第一个控制输入。随后,时间窗口向前滚动,重复该过程。这种方法确保了控制的实时性和适应性。例如,在机器人控制中,MPC每秒可能优化30次,确保路径跟踪的精度。
反馈校正
MPC通过实时测量系统的实际输出,与预测结果对比,修正模型误差。这种反馈机制增强了系统的鲁棒性,使其能够应对外部扰动或模型不准确性。例如,当传感器检测到温度偏差时,MPC会调整预测模型以保持控制精度。
MPC的优势
MPC的最大亮点在于其多变量优化能力和显式处理约束。例如,在一个化工反应釜中,MPC可以同时调节温度和压力,确保反应速率最大化的同时不超出安全限制(如压力不超过10 bar)。这种能力使其在复杂系统中远超传统方法。
3. MPC的实战应用
MPC在多个领域展现了卓越的性能,以下是几个典型案例:
- 机器人轨迹跟踪
在机器人运动控制中,MPC预测未来路径,优化控制输入(如电机扭矩),既能避开障碍物,又能满足物理约束(如最大扭矩限制)。例如,工业机械臂可通过MPC实现毫米级的精确定位。 - 自动驾驶
自动驾驶系统中,MPC预测未来20步的车辆轨迹,动态优化转向角和加速度,确保安全、舒适的行驶体验,同时满足道路和车辆约束(如速度限制在80 km/h以内)。 - 工业过程控制
在炼油厂中,MPC同时优化温度、压力和流量等多个变量,提高生产效率并确保安全性。其全局优化的特性显著提升了复杂过程的经济效益,例如减少5%的能耗。
4. MPC的缺点
尽管MPC功能强大,但其应用也面临一些挑战和局限性:
- 高计算复杂度
MPC需要在每个控制周期内在线求解优化问题(如二次规划),对计算资源要求较高。特别是在非线性系统或长预测时域(例如N > 50)的情况下,单次优化可能耗时数百毫秒。例如,在嵌入式设备上实现10步预测的MPC,可能难以满足实时性要求。 - 模型依赖性强
MPC的性能高度依赖于系统模型的准确性。如果模型与实际系统存在较大误差(例如温度模型误差超过2%),预测轨迹的偏差可能导致控制失效,甚至引发安全问题。 - 建模成本高
建立精确的系统模型需要大量时间和专业知识。复杂系统(如自动驾驶)可能需要融合机理模型与数据驱动模型,开发周期可能长达数月。 - 泛化性与适应性有限
MPC的代价函数和约束条件通常针对特定任务设计,难以直接复用到其他场景。例如,物流路径规划的MPC参数无法直接用于无人机控制。此外,面对突发干扰(如风速突变),MPC需要频繁更新模型,否则可能失效。
5. 详细的MPC控制循环示例
为了更好地理解MPC的工作原理,以下是一个详细的MPC控制循环示例,假设控制一个质量-弹簧-阻尼系统,目标是使质量的位置跟随参考轨迹。以下是Python伪代码:
import numpy as np
# 系统参数(离散时间模型,dt=1)
A = np.array([[1, 1], [0, 1]]) # 状态转移矩阵,x = [位置, 速度]
B = np.array([[0.5], [1]]) # 输入矩阵
x_init = np.array([[0], [0]]) # 初始状态
# 预测与控制参数
N = 10 # 预测时域(10步)
M = 2 # 控制时域(优化2步)
Q = np.array([[1, 0], [0, 0]]) # 状态权重矩阵(仅惩罚位置误差)
R = 0.1 # 控制输入权重
# 预测未来状态
def predict_states(x, u_sequence):
states = [x] # 存储预测状态
current_x = x
for i in range(N):
if i < M:
u = u_sequence[i] # 使用优化控制输入
else:
u = u_sequence[-1] # 超出控制时域后保持最后输入
next_x = A @ current_x + B * u # 状态更新
states.append(next_x)
current_x = next_x
return states
# 计算成本函数
def calculate_cost(states, u_sequence, x_ref_sequence):
cost = 0
for i in range(1, N+1):
error = states[i] - x_ref_sequence[i-1] # 状态误差
cost += error.T @ Q @ error # 状态成本
for u in u_sequence:
cost += R * u**2 # 控制输入成本
return cost
# 优化控制输入(简化版,实际应使用二次规划求解器)
def optimize_u(x, x_ref_sequence):
u_sequence = np.zeros(M) # 初始控制序列
best_cost = float('inf')
# 网格搜索(简化替代优化求解器)
for u0 in np.linspace(-1, 1, 10):
for u1 in np.linspace(-1, 1, 10):
u_try = [u0, u1]
states = predict_states(x, u_try)
cost = calculate_cost(states, u_try, x_ref_sequence)
if cost < best_cost:
best_cost = cost
u_sequence = u_try
return u_sequence
# MPC控制循环
def mpc_controller():
x = x_init # 初始状态
MAX_STEPS = 20
for k in range(MAX_STEPS):
# 生成参考轨迹(假设目标位置为1)
x_ref_sequence = [np.array([[1], [0]]) for _ in range(N)]
# 优化控制输入
u_sequence = optimize_u(x, x_ref_sequence)
# 应用第一个控制输入
print(f"Step {k}: State = {x.flatten()}, Control = {u_sequence[0]}")
x = A @ x + B * u_sequence[0] # 更新状态
return x
# 运行控制器
if __name__ == "__main__":
final_state = mpc_controller()
print(f"Final state: {final_state.flatten()}")示例说明
- 系统模型:质量-弹簧-阻尼系统的离散状态空间模型,状态包括位置和速度。
- 预测与优化:在每个控制周期内,MPC预测未来10步状态,优化2步控制输入,最小化位置误差和控制成本。
- 简化处理:实际优化通常使用二次规划求解器(如CVXPY),此处用网格搜索简化演示。
- 输出:每步打印当前状态和控制输入,最终状态接近目标位置1。
6. MPC vs. PID
PID控制器因其简单性和低计算成本在工业中应用广泛,但其局限性在复杂场景下暴露无遗。PID是为单变量控制设计的,难以处理多变量间的强耦合,也无法显式应对约束条件(如最大压力限制)。在长时延或高精度要求的系统中,PID的表现往往不佳。
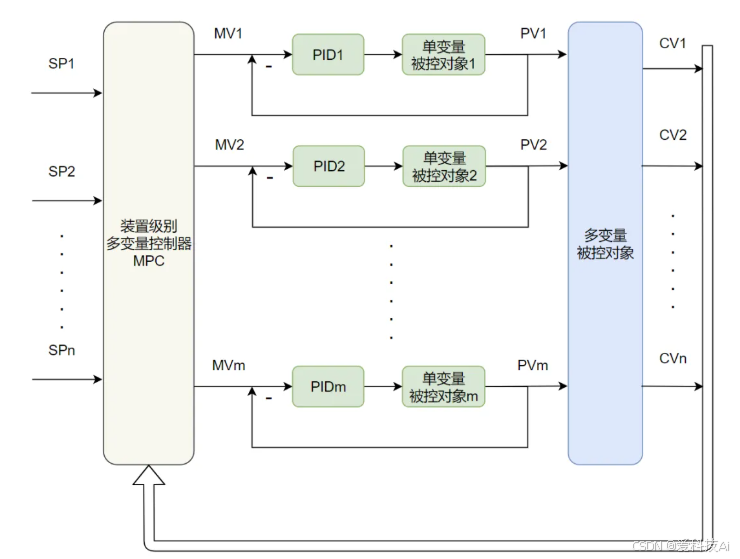
相比之下,MPC天生支持多变量控制,能够显式处理约束,并优化整体性能。然而,MPC需要精确的系统模型和在线优化,计算复杂度较高,因此在简单场景下不如PID经济实用。在实际工业中,两者常以串级控制形式配合:MPC负责多变量解耦和全局优化,PID执行单变量的底层控制,优势互补。
MPC vs. PID:核心对比与场景选择指南
1) 核心特性对比
| 维度 | PID | MPC |
|---|---|---|
| 控制类型 | 单变量反馈控制(单输入单输出,SISO) | 多变量优化控制(多输入多输出,MIMO) |
| 多变量处理 | 需拆解为多个独立回路,强耦合场景下难以稳定 | 原生支持多变量耦合,显式处理交互影响 |
| 约束处理 | 无法直接处理约束,依赖限幅或人工干预 | 显式集成输入/输出约束(如压力限制、温度安全范围) |
| 计算复杂度 | 极低(仅比例、积分、微分运算) | 高(需在线求解优化问题,尤其非线性系统耗时显著) |
| 模型依赖 | 无需模型,仅依赖误差反馈 | 需精确数学模型(机理模型或数据驱动模型) |
| 动态适应性 | 适用于简单线性系统,对时延、非线性敏感 | 支持复杂动态(时变、非线性、长时延),滚动优化提升鲁棒性 |
| 调试成本 | 低(参数少,规则明确) | 高(需建模、调整权重矩阵和时域参数) |
| 典型应用场景 | 电机转速控制、液位调节、温度恒控等单变量场景 | 无人机轨迹跟踪、化工过程多变量优化、自动驾驶路径规划 |
2) 优劣势深度解析
PID的核心优势与短板
-
优势:
- 简单可靠:三参数(Kp, Ki, Kd)即可覆盖80%工业场景,调试门槛低。
- 实时性强:微秒级响应速度,适合高频率控制需求(如伺服电机)。
- 维护便捷:故障排查直观,备件替换成本低。
-
短板:
- 多变量局限:强耦合系统需手动解耦(如锅炉燃烧控制中燃料-空气比调节),易引发振荡。
- 约束无力:超调或约束冲突时,依赖外部逻辑干预(如紧急停机)。
- 长时延失效:积分饱和问题导致响应滞后(如炼油厂蒸馏塔液位控制)。
MPC的核心优势与挑战
-
优势:
- 多变量协同:天然处理非方系统(输入≠输出),如化工反应中3个阀门控制5个温度监测点。
- 约束内化:直接将安全限值写入优化问题(如机器人关节扭矩限制)。
- 前瞻控制:利用预测时域规避未来风险(如自动驾驶预判行人轨迹)。
-
挑战:
- 建模门槛:复杂系统(如风力发电机)需融合机理模型与数据驱动,开发周期长。
- 算力需求:非线性MPC单次求解需10-100ms,依赖GPU/FPGA加速。
- 参数敏感:权重矩阵(Q, R)调整不当易导致优化目标偏离实际需求。
3) 协作模式:MPC与PID的工业级融合
典型架构:分层控制
-
MPC主层:负责全局优化与解耦
- 输入:多变量设定值、干扰预测(如天气变化对能源需求的影响)
- 输出:各子回路的设定值(如化工反应器中温度、压力、流量的协同目标)
-
PID从层:执行单变量精准跟踪
- 输入:MPC下发的设定值
- 输出:阀门开度、电机转速等直接控制量
案例:精馏塔控制
- MPC任务:平衡塔顶纯度(95%)、塔底残留率(<2%)、能耗(蒸汽用量)
- PID分工:
- PID-1:调节再沸器蒸汽阀(控制塔底温度)
- PID-2:调节回流阀(控制塔顶组分)
- PID-3:调节进料预热器(控制进料焓值)
7. 结语
**模型预测控制(MPC)**凭借其多变量优化、约束处理和高精度控制能力,已成为复杂系统中的首选控制策略。尽管其计算复杂性和模型依赖性带来一定挑战,但随着计算能力提升和工具(如MATLAB、Python)的普及,MPC的应用前景愈发广阔。建议您尝试使用MATLAB的MPC工具箱或Python的CVXPY库实现一个简单案例,深入探索其潜力。

















 2062
2062

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









