






无迹卡尔曼滤波估算SOC模型 UKF估算SOC
ID:2929689640649747
粉巷知足的主任
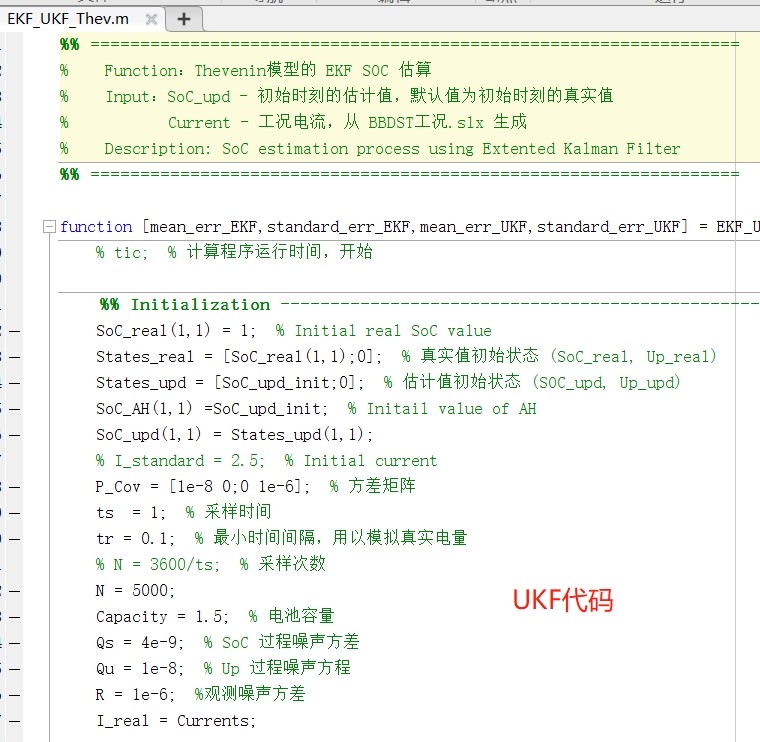

无迹卡尔曼滤波(Unscented Kalman Filter,简称UKF)是一种非线性滤波算法,它通过将非线性系统的高斯分布逼近为一组离散的采样点,然后通过这些采样点来估计真实状态的概率分布。在电池管理系统中,UKF被广泛应用于估算电池的状态,其中特别重要的一个变量是电池的剩余容量(State of Charge,简称SOC)。
SOC是电池管理系统中的核心参数之一,它代表了电池当前的可用能量与总能量的比例。准确地估计SOC对于电池的安全运行和性能优化至关重要。然而,由于电池的非线性特性以及外部环境的影响,准确地估计SOC一直是一个具有挑战性的问题。
在过去的研究中,常见的SOC估算方法包括卡尔曼滤波(Kalman Filter,KF)和扩展卡尔曼滤波(Extended Kalman Filter,EKF)。然而,KF和EKF都是基于线性系统和高斯分布假设的,对于非线性系统的SOC估算并不准确。为了解决这个问题,研究人员提出了UKF算法,它通过引入无迹变换(Unscented Transformation)将非线性系统的概率分布进行逼近。
UKF算法的核心思想是通过一系列称为Sigma点的特定采样点来逼近非线性系统的概率分布。这些Sigma点是通过对系统状态进行选取和变换得到的,进而通过相应的权重对这些Sigma点进行加权求和,从而得到对状态概率分布的估计。通过这种方法,UKF能够在保持非线性特性的同时,更准确地估计SOC。
在SOC模型的UKF估算中,关键的一步是选择合适的Sigma点。常见的选择方法包括Merwe的方法、Julier的方法和Wan的方法等。这些方法有不同的特点和性能,可以根据具体的应用场景选择合适的方法。
此外,UKF还可以通过改进模型的观测方程来进一步提高SOC估算的精度。一种常见的改进方法是使用扩展状态向量,将电池内阻等其他参数考虑在内,从而提高SOC的估算精度。
值得注意的是,UKF算法虽然相对于KF和EKF算法具有更好的非线性逼近能力,但由于引入了更多的计算和采样点,算法的计算复杂度也相应增加。因此,在实际应用中需要权衡算法的精度和计算成本。
总而言之,无迹卡尔曼滤波估算SOC模型的UKF算法是一种有效的非线性滤波方法,它通过引入Sigma点来逼近非线性系统的概率分布,从而更准确地估算SOC。该算法在电池管理系统中具有广泛的应用前景,可以提高电池的安全性和性能。
相关的代码,程序地址如下:http://fansik.cn/689640649747.html
















 406
406











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









