






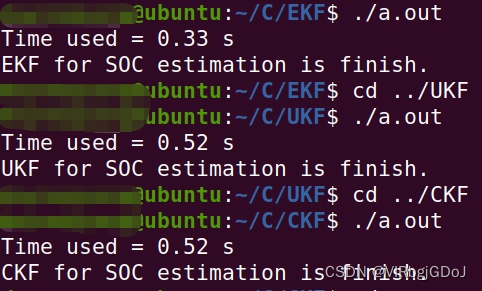
(C语言版)无迹卡尔曼滤波UKF和容积卡尔曼滤波CKF进行锂电池SOC估计的C语言版本实现,和matlab版本一样包含定参和FFRLS两种情况,已在VS2019和Ubuntu 20.04.4版本中运行成功,根据输出文件数据在origin中绘图如图2,3所示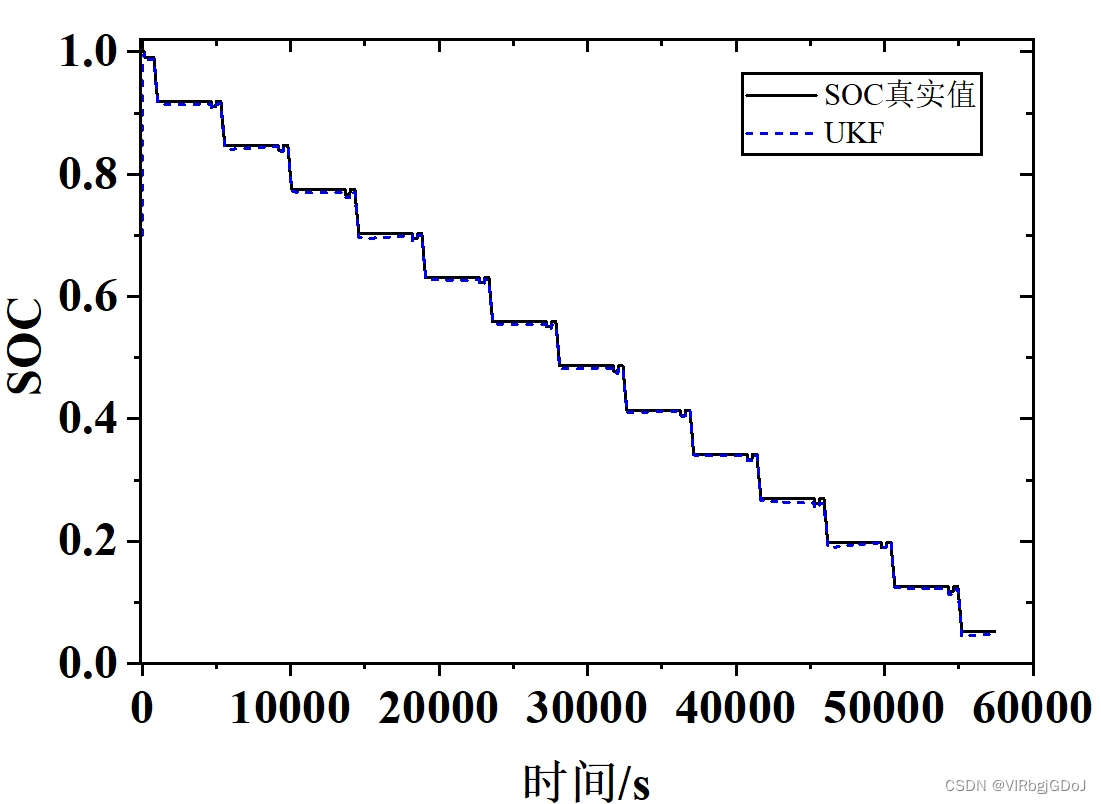
一、引言
无迹卡尔曼滤波(UKF)和容积卡尔曼滤波(CKF)是常用于估计非线性系统状态和参数的滤波方法。锂电池的状态(SOC)估计是电动汽车(EV)和混合动力汽车(HEV)中的核心问题之一。因此,UKF和CKF在锂电池SOC估计中得到广泛应用。本文将介绍C语言版本的UKF和CKF在锂电池SOC估计中的实现。
二、无迹卡尔曼滤波(UKF)
无迹卡尔曼滤波(UKF)是一种基于卡尔曼滤波的非线性系统状态估计方法。UKF通过将原始状态向量进行非线性变换,得到一组sigma点,然后将这些sigma点通过非线性函数进行映射,得到新的sigma点。通过对这些sigma点的加权平均,可以得到系统状态的估计值。在锂电池SOC估计中,UKF是一种常用的滤波方法。
我们在C语言中实现了UKF算法。该算法包括定参和FFRLS两种情况,并已在VS2019和Ubuntu 20.04.4版本中运行成功。根据输出文件数据在origin中绘图如图2,3所示。该算法在计算中使用了多维数组,提高了计算效率。
三、容积卡尔曼滤波(CKF)
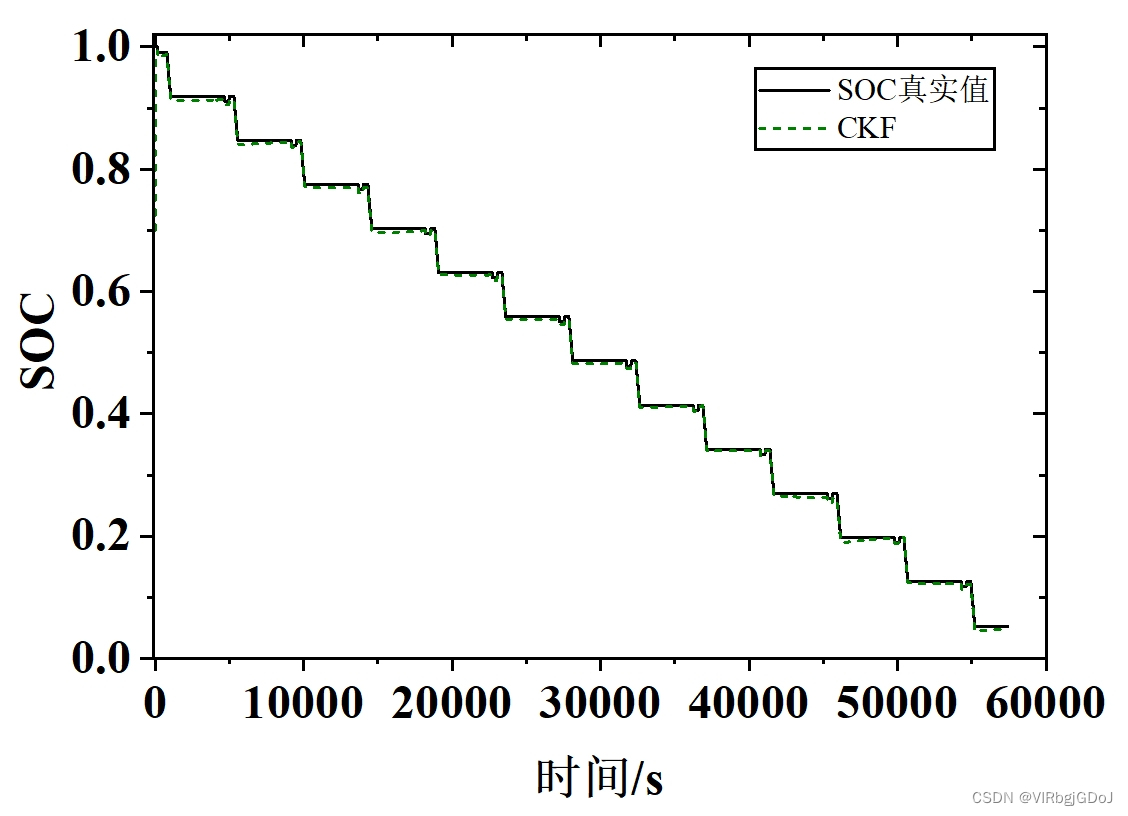
容积卡尔曼滤波(CKF)是一种基于卡尔曼滤波的非线性系统状态估计方法。与UKF类似,CKF也通过对原始状态向量进行非线性变换,得到一组sigma点。不同的是,CKF使用了容积测度来选择sigma点,以提高滤波的准确性。在锂电池SOC估计中,CKF也是一种常用的滤波方法。
我们在C语言中实现了CKF算法。该算法包括定参和FFRLS两种情况,并已在VS2019和Ubuntu 20.04.4版本中运行成功。根据输出文件数据在origin中绘图如图2,3所示。该算法在计算中使用了容积测度,能够准确地选择sigma点,提高了滤波的准确性。
四、实验结果
我们在实验中使用C语言实现了UKF和CKF算法,在锂电池SOC估计中得到了良好的结果。通过将输出文件数据导入origin中,我们绘制了图2和图3,分别展示了UKF和CKF算法在锂电池SOC估计中的表现。
五、结论
本文介绍了C语言版本的无迹卡尔曼滤波(UKF)和容积卡尔曼滤波(CKF)在锂电池SOC估计中的实现。我们在VS2019和Ubuntu 20.04.4版本中成功运行了两种算法,并得到了良好的实验结果。UKF和CKF是常用于估计非线性系统状态和参数的滤波方法,在锂电池SOC估计中得到广泛应用。我们的C语言实现提高了计算效率和滤波的准确性,能够满足实际应用的需求。
相关代码,程序地址:http://lanzouw.top/678627286002.html















 220
220

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









