







一、测量原理
通过芯片中集成的横向霍尔传感器,测量Z方向的磁通密度Bz
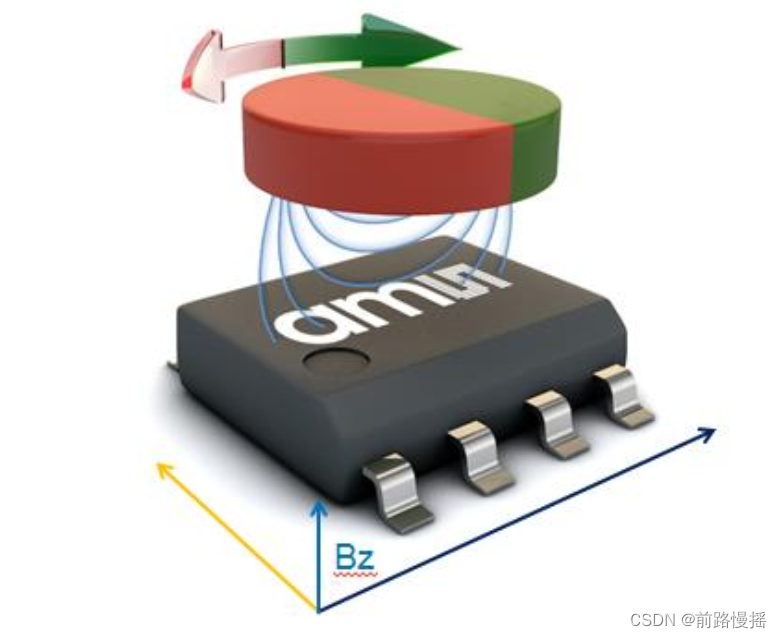 旋转角度测量的原理要求当磁体旋转时,芯片上的霍尔元件可以感应到一个完整的磁周期,这需要径向磁化的磁铁才能实现
旋转角度测量的原理要求当磁体旋转时,芯片上的霍尔元件可以感应到一个完整的磁周期,这需要径向磁化的磁铁才能实现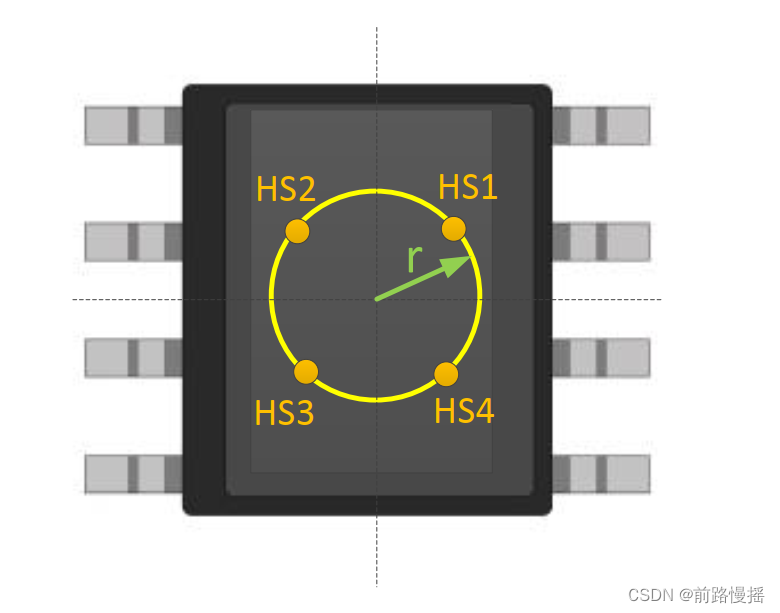
上图展示霍尔传感器的位置和测量半径,旋转位置传感器模型可以用数学方法描述如下
𝑆𝑖𝑔𝑛𝑎𝑙1 = +𝑉𝐻𝑆1 + 𝑉𝐻𝑆2 - 𝑉𝐻𝑆3 - 𝑉𝐻𝑆4
𝑆𝑖𝑔𝑛𝑎𝑙2 = +𝑉𝐻𝑆1 - 𝑉𝐻𝑆2 - 𝑉𝐻𝑆3 + 𝑉𝐻𝑆4
∝ = 𝐴𝑇𝐴𝑁2(𝑆𝑖𝑔𝑛𝑎𝑙1, 𝑆𝑖𝑔𝑛ᵄ
一、测量原理
通过芯片中集成的横向霍尔传感器,测量Z方向的磁通密度Bz
旋转角度测量的原理要求当磁体旋转时,芯片上的霍尔元件可以感应到一个完整的磁周期,这需要径向磁化的磁铁才能实现
上图展示霍尔传感器的位置和测量半径,旋转位置传感器模型可以用数学方法描述如下
𝑆𝑖𝑔𝑛𝑎𝑙1 = +𝑉𝐻𝑆1 + 𝑉𝐻𝑆2 - 𝑉𝐻𝑆3 - 𝑉𝐻𝑆4
𝑆𝑖𝑔𝑛𝑎𝑙2 = +𝑉𝐻𝑆1 - 𝑉𝐻𝑆2 - 𝑉𝐻𝑆3 + 𝑉𝐻𝑆4
∝ = 𝐴𝑇𝐴𝑁2(𝑆𝑖𝑔𝑛𝑎𝑙1, 𝑆𝑖𝑔𝑛ᵄ

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言




 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章























