






💥💥💥💞💞💞欢迎来到本博客❤️❤️❤️💥💥💥
🏆博主优势:🌞🌞🌞博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。
⛳️座右铭:行百里者,半于九十。
目录
1. 人工势场法 (Artificial Potential Field Method, APF)
3. 人工鱼群算法 (Artificial Fish Swarm Algorithm, AFSA)
4. 果蝇优化算法 (Fruit Fly Optimization Algorithm, FOA)
💥1 概述
近年来,智能机器人逐渐应用于医疗服务﹑航空等众多领域。路径规划作为机器人实现智能自主规划的关键技术,受到众多学者的广泛关注。其具体含义是指移动机器人在存在障碍物的真实空间环境中,自主规划出一条无碰撞的有效路径3。路径规划根据可支配的外界环境有效信息的程度可以分为静态路径规划和动态路径规划。实际案例中根据算法的表现来看,动态路径规划算法实时性较差﹑实现较为复杂,在现有的技术条件下难以保证搜索结果有较高的精度。
路径规划是机器人学、自动驾驶、无人机导航等领域中的一个重要问题,旨在寻找从起始点到目标点之间的一条最优或次优路径,同时考虑环境约束、动态障碍等因素。您提到的人工势场法、蝙蝠优化算法、人工鱼群算法、果蝇优化算法都是解决路径规划问题的有效方法,各有特点和适用场景。
1. 人工势场法 (Artificial Potential Field Method, APF)
- 原理:人工势场法通过构建一个虚拟的势场模型来引导机器人移动。该模型包括吸引势场(指向目标)和排斥势场(远离障碍物)。机器人在这些势场的共同作用下,沿着势能最低的方向移动,达到从起点到终点的路径规划目的。
- 优点:简单易实现,计算效率高。
- 缺点:可能遇到局部最小值问题,导致路径不是全局最优;对于复杂环境的适应性有限。
2. 蝙蝠优化算法 (Bat Algorithm, BA)
- 原理:灵感来源于蝙蝠的回声定位行为,通过模拟蝙蝠的飞行和发出、接收回声的过程来进行优化搜索。算法中每个解都代表一只蝙蝠,它们通过调整飞行速度和频率,在解空间中搜索最佳路径。
- 优点:具有较好的全局搜索能力和灵活性,适用于解决非线性、多模态优化问题。
- 缺点:参数选择敏感,过多的迭代次数可能增加计算负担。
3. 人工鱼群算法 (Artificial Fish Swarm Algorithm, AFSA)
- 原理:模仿鱼类群体的觅食、聚群、追尾和回避行为。在这个算法中,每条“鱼”代表一个可能的解决方案,通过鱼之间的相互作用和对环境的适应来寻找最优路径。
- 优点:能够处理复杂的多约束优化问题,具有较好的全局收敛性和多样性保持能力。
- 缺点:算法性能对初始参数设置敏感,过度聚群可能导致早熟收敛。
4. 果蝇优化算法 (Fruit Fly Optimization Algorithm, FOA)
- 原理:模拟果蝇寻找食物的过程,利用果蝇的嗅觉、视觉以及跟随机制来搜索最优解。该算法通过调节搜索步长和方向,引导种群向更优解区域集中。
- 优点:简单、灵活,适用于连续和离散优化问题,具有较快的收敛速度。
- 缺点:易受参数配置影响,对于高度复杂的优化问题可能需要较多的调整才能获得满意结果。
综合应用
在实际路径规划问题中,研究者可能会根据具体应用场景和要求,结合以上一种或多种算法的优点,设计混合或改进算法,以提升路径规划的效率、鲁棒性和精确度。例如,可以先用人工势场法快速生成初步路径,然后应用蝙蝠优化算法或人工鱼群算法进一步优化路径,提高路径的全局最优性或解决局部最小值陷阱问题。同时,实际应用中还需考虑实时性、环境动态变化等因素,进行适当的算法调整和优化。
📚2 运行结果
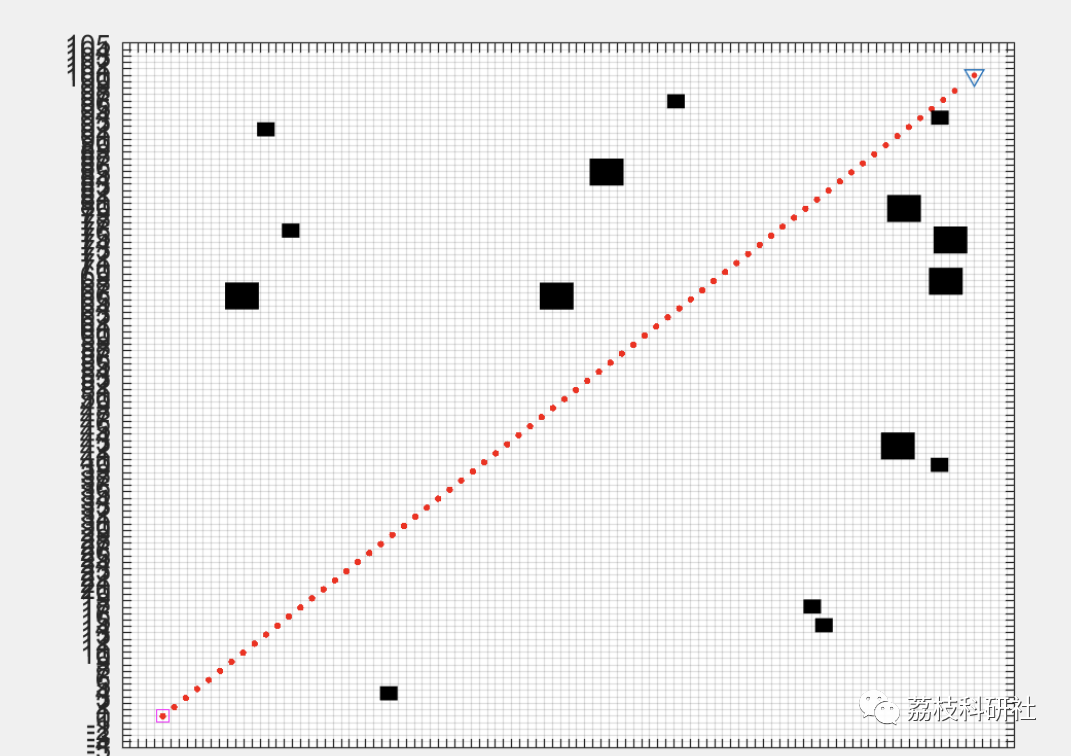
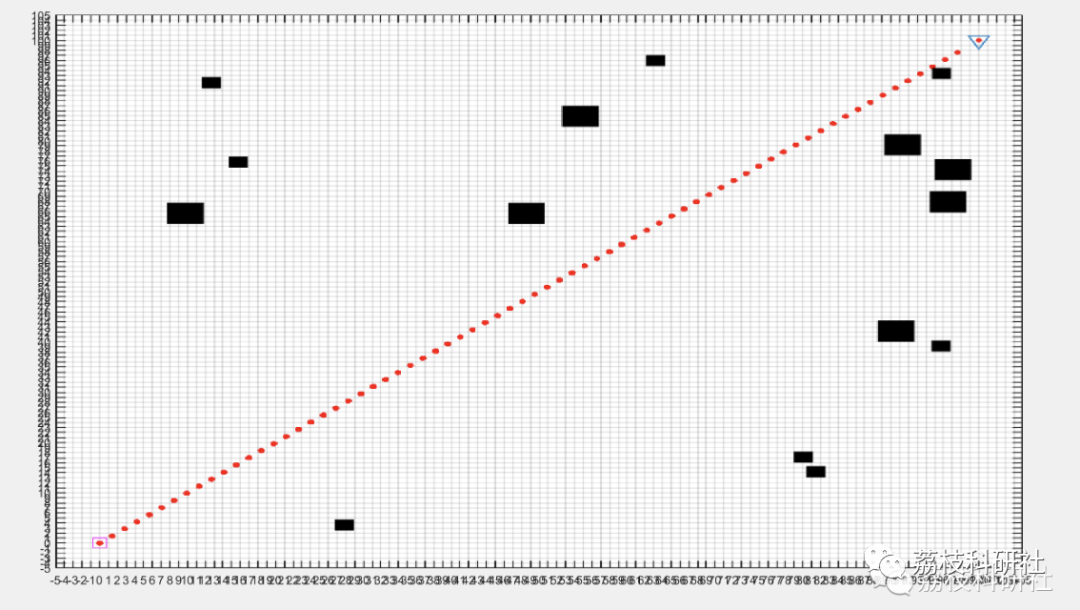
📃2.1 算例1
基于人工势场法的机器人路径规划:随机生成12-15个障碍物,每个障碍物随机占据6-23个栅格,利用该人工势场法编程实现机器人从左下到右上的路径规划。同时在代码中已实现动态展示的效果。
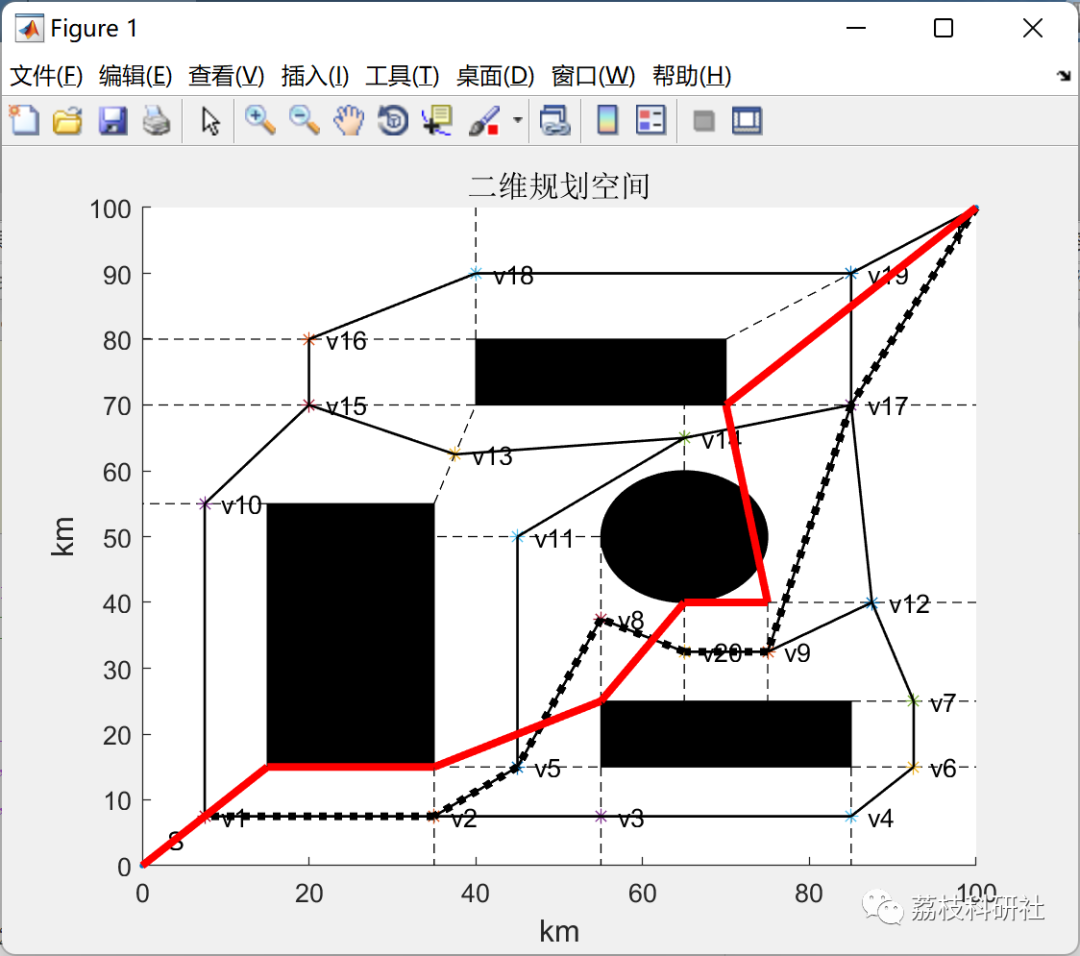
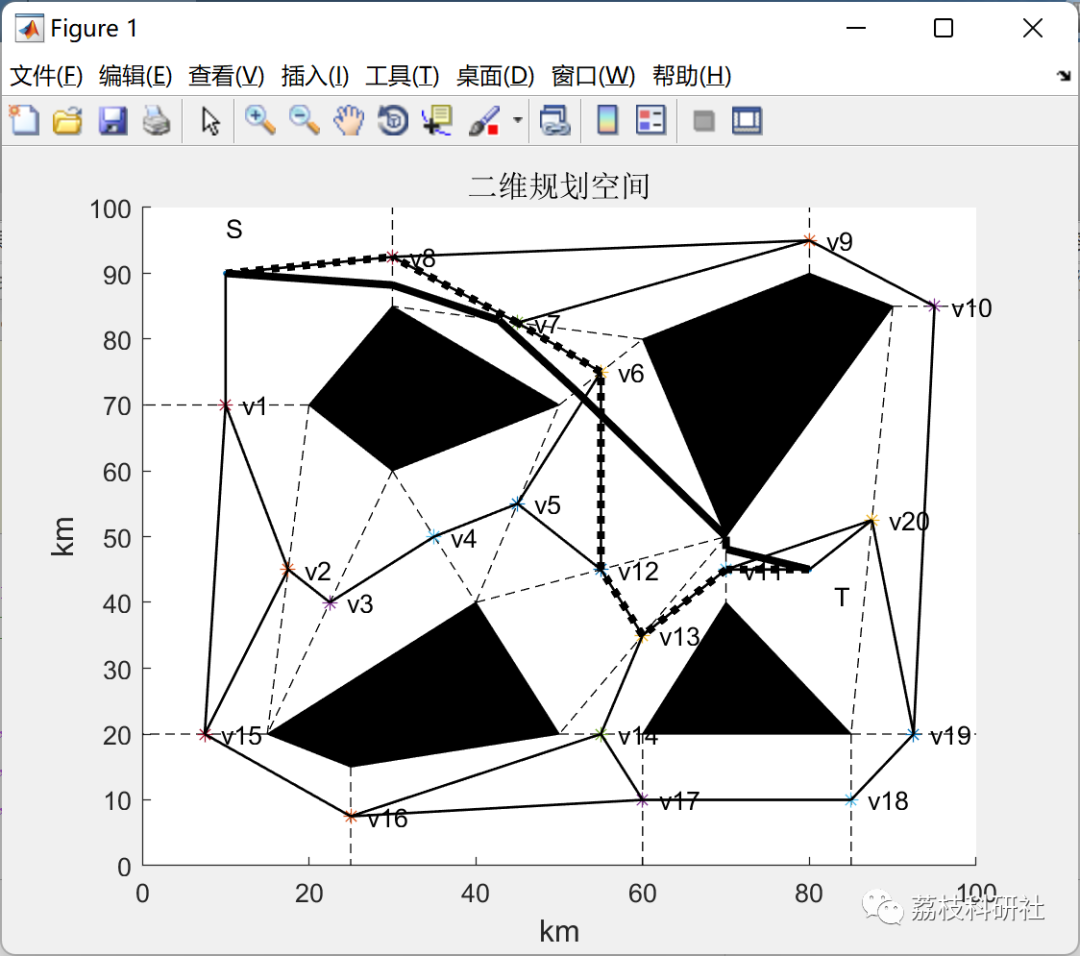
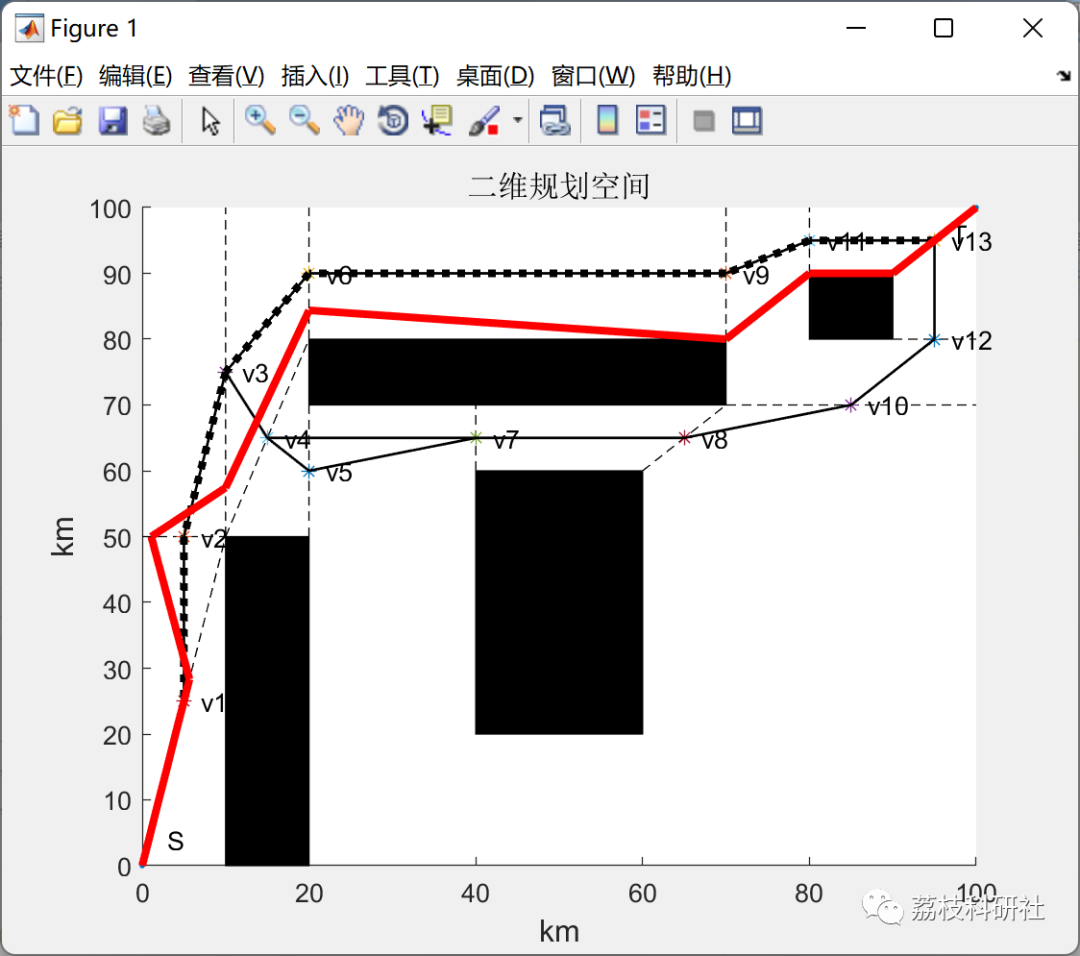
📃2.2 算例2
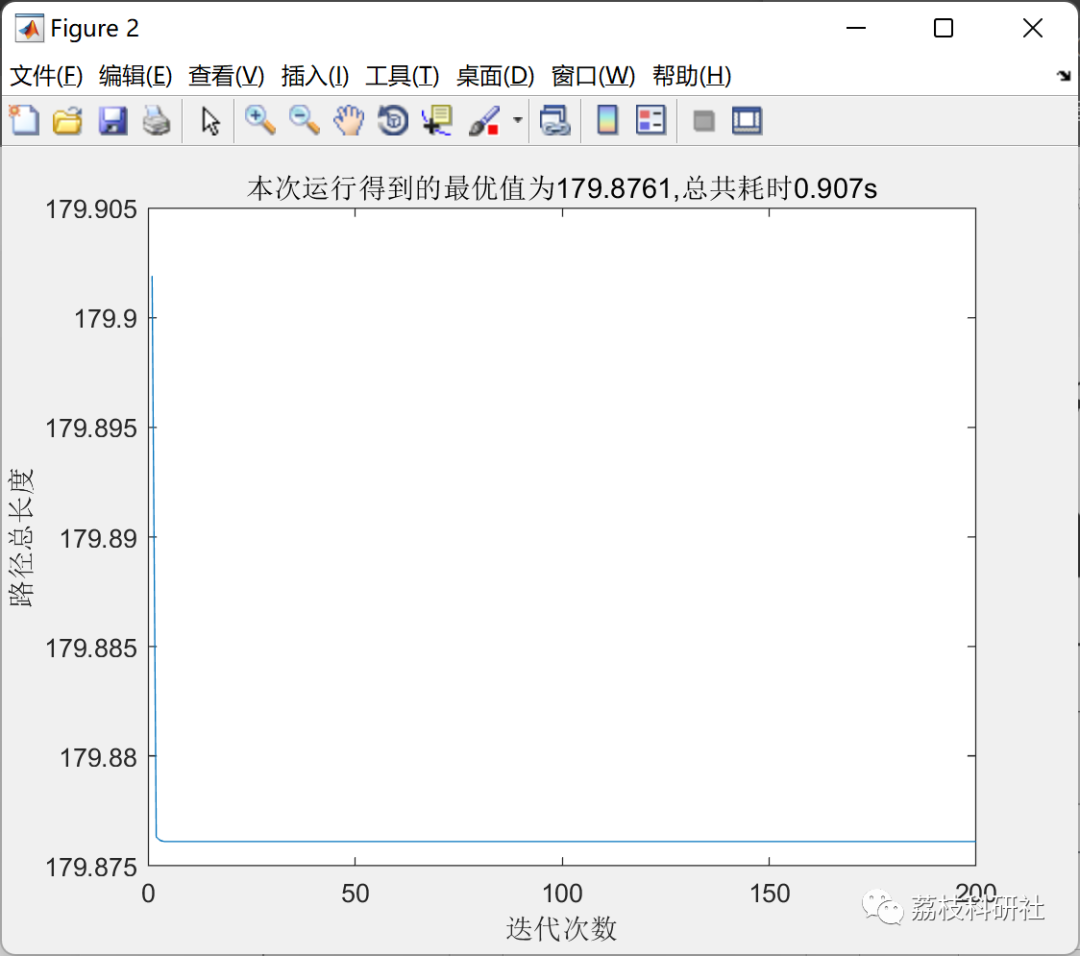
基于果蝇优化算法的路径规划:根据提供的地图,实现单机器人的全局路径规划。以及拓展部份的双机器人路径规划,两个机器人分别从左下到右上,和从右下到左上。

部分代码:
function path = DijkstraPlan(position,sign)
%% 基于Dijkstra算法的路径规划算法
%position input %节点位置
%sign input %节点间是否可达
%path output %规划路径
%% 计算路径距离
cost = ones(size(sign))*10000;
[n,m] = size(sign);
for i = 1:n
for j = 1:m
if sign(i,j) == 1
cost(i,j) = sqrt(sum((position(i,:)-position(j,:)).^2));
end
end
end
%% 路径开始点
dist = cost(1,:); %节点间路径长度
s = zeros(size(dist)); %节点经过标志
s(1) = 1;dist(1) = 0;
path = zeros(size(dist)); %依次经过的节点
path(1,:) = 1;
%% 循环寻找路径点
for num = 2:n
% 选择路径长度最小点
mindist = 10000;
for i = 1:length(dist)
if s(i) == 0
if dist(i)< mindist
mindist = dist(i);
u = i;
end
end
end
% 更新点点间路径
s(u) = 1;
for w = 1:length(dist)
if s(w) == 0
if dist(u)+cost(u,w) < dist(w)
dist(w) = dist(u)+cost(u,w);
path(w) = u;
end
end
end
end
🎉3 参考文献
[1]鲍久圣,张牧野,葛世荣,刘琴,袁晓明,王茂森,阴妍,赵亮.基于改进A*和人工势场算法的无轨胶轮车井下无人驾驶路径规划[J].煤炭学报,2022,47(3):1347-1360
[2]温淑慧,问泽藤,刘鑫,温淑焕.基于ROS的移动机器人自主建图与路径规划[J].沈阳工业大学学报,2022,44(1):90-94















 854
854

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









