







感受
介绍
K近邻法是一种基本分类与回归的方法,K近邻法假设给定一个训练数据集,其中的实力类别已定,分类时,对新的实例,根据其k个最近邻的训练实例的类别,通过多数表决等方式进行预测。K近邻法不具有显式的学习过程。K近邻法实际上利用训练数据集对特征向量空间进行划分,并作为其分类的“模型”。K值的选择,距离度量及分类决策规则是k近邻法的三个基本要素。
1.1 k近邻算法

K近邻算法的特殊情况是k=1的情形,称为近邻算法。对于输入的实例点x,最近邻法将训练数据集中与x最近邻点的类作为x的类。
K近邻法没有显式的学习过程。
1.2 k近邻模型
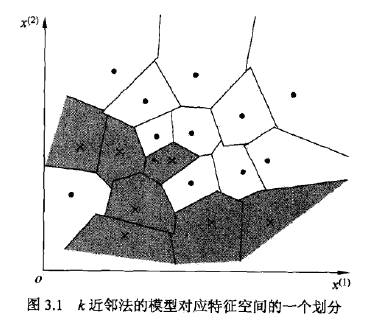
k近邻法中,当训练集、距离度量(欧式距离),k值及分类决策规则(多数表决)确定后,对于任何一个新的输入实例,它所属的类唯一地确定。这相当于根据上述要素将特征空间划分为一些子空间,确定子空间里的每个点所属的类。
特征空间中,对每个训练实例点xi,距离该点比其他点更近的所有点组成一个区域,叫做单元(cell)。每个训练实例点拥有一个单元,所有训练实例点的单元构成对特征空间的一个划分。最近邻法将实例xi的类yi作为其单元中所有点的类标记(classlabel)。这样,每个单元的实例点的类别是确定的。
1.2.1距离度量
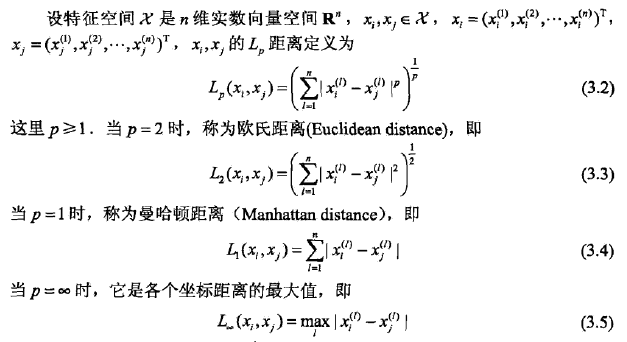
特征空间中两个实例点的距离是两个实例点相似程度的反映。K近邻模型的特征空间一般是n维实数向量Rn.使用的距离是欧式距离,但也可以是其他距离,如更一般的Lp距离或minkowski距离。
1.2.2 K值的选择
K值的选择会对k邻近算法的结果产生重大影响。
如果选择较小的k值,就相当于用较小的邻域中的训练实例进行预测,“学习”的近似误差会减小,只有与输入实例较近的训练实例才会对预测结果起作用。但缺点是“学习”估计的误差会增大,预测结果会对近邻的实例点非常敏感。如果邻近的实例点恰巧是噪声,预测就会出错。K值的减小就意味着整体模型变得复杂,容易发生过拟合。
如果选择较大的k值,就相当于用较大领域中的训练实例进行预测。其优点是可以减少学习的估计误差。但缺点是学习的近似误差会增大,这时与输入实例较远的训练实例也会对预测起作用,使预测发生错误。K值的增大就意味着模型变得简单。
在应用中,k值一般取一个较小的数值。通过交叉验证法来选取最优的k值。
1.2.3分类决策规则
K近邻法中的分类决策往往是多数表决,即由输入实例的k个邻近的训练实例中的多数类决定输入实例的类。
多数表决规则(majority voting rule)有如下解释:如果分类的损失函数为0-1损失函数,分类函数为:
误分类的概率是:

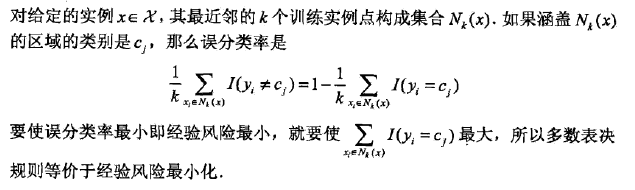
比如k=6,其中有4个分错了,那么错误率就是4/6,正确率就是2/6.
1.3 k近邻法的实现:kd树
实现k近邻法时,主要考虑的问题是如何对训练数据进行快速k近邻搜索。这点在特征空间的维数大及训练数据容量大时尤其重要。
最简单的实现方法是线性扫描(linear scan)。这时要计算输入实例与每一个训练实例的距离。当训练集很大时,计算非常耗时,这种方法是不可行的。
为提高k近邻搜索的效率,可以考虑使用特殊的结构存储训练数据,以减少计算距离的次数。
1.3.1 构造kd树
Kd树是一种对k维空间中的实例点进行存储以便对其进行快速检索的树形数据结构。Kd树是二叉树,表示对k维空间的一个划分(partition)。构造kd树相当于不断地用垂直于坐标轴的超平面将k维空间切分,构成一些列的k维超矩形区域,kd树的每个结点对应对应于一个k维超矩形区域。
构造kd树的方法如下:构造根节点,使根节点对应于k维空间中包含所有实例点的超矩形区域;通过下面的递归方法,不断地对k维空间进行切分,生成子结点。在超矩形区域(结点)上选择一个坐标轴和在此坐标轴上的一个切分点,确定一个超平面,这个超平面通过选定的切分点并垂直于选定的坐标轴,将当前超矩形区域切分为左右两个子区域(子结点);这时,实例被分到两个子区域。这个过程直到子区域内没有实例时终止(终止时的结点为叶子结点)。在此过程中,将实例保存在相应的结点上。
构造平衡kd树算法:
输入:k维空间数据集T={x1,x2,…,xN}
其中xi=(xi(1),xi(2),…,xi(k))T, i=1,2,..,N;
输出:kd树
(1) 开始:构造根节点,根节点对应于包含T的k维空间的超矩形区域。
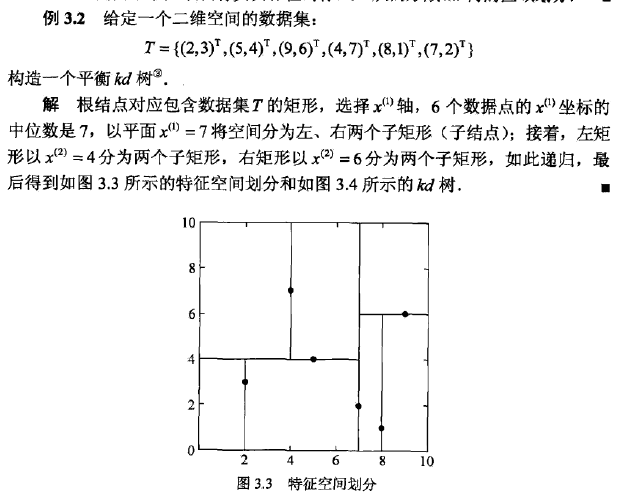
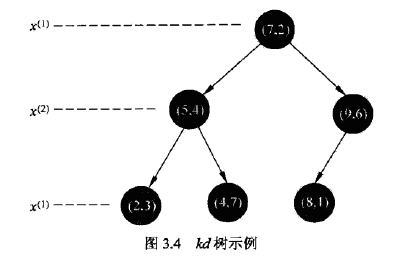
选择x(1)为坐标轴,以T中所有实例的x(1)坐标的中位数为切分点,将根结点对应的超矩形区域切分为两个子区域。切分由通过切分点并与坐标轴x(1)垂直的超平面实现。
由根结点生成深度为1的左、右子结点:左子结点对应坐标x(1)小于切分点的子区域,右子节点对应于坐标x(1)大于切分点的子区域。
(2) 重复:对深度为j的结点,选择x(l)为切分的坐标轴,l=j(mod k)+1,以该结点的区域中所有实例的x(l)坐标的中位数为切分点,将该结点对应的超矩形区域切分为两个子区域。切分由通过切分点并与坐标轴x(l)垂直的超平面实现。
由该结点生成深度为j+1的左、右子结点:左子结点对应坐标x(l)小于切分点的子区域,右子结点对应坐标x(l)大于切分点的子区域。
将落在切分超平面上的实例点保存在该结点。
(3) 直到两个子区域没有实例存在时停止,从而形成kd树区域划分。
可能有人不明白上述过程是怎么做的,下面有一个实例,但是里面有一个小小的疑问,x(1)中位数的计算过程是:总共有6个数,从小到大排列为[2.4.5.7.8.9],是偶数个,6/2=3,因此中位数在第三个和第四个之间,(5+7)/2=6,命名计算的中位数是6,而本题却说中位数是7,所以说得不够准确。
1.3.2 搜索kd树
给定一个目标点,搜索其最近邻。首先找到包含目标点的叶结点;然后从该叶结点出发,依次回退到父结点;不断查找与目标点最邻近的结点,当确定不可能存在更近的结点时终止。这样搜索就被限制在空间的局部区域上,效率大为提高。
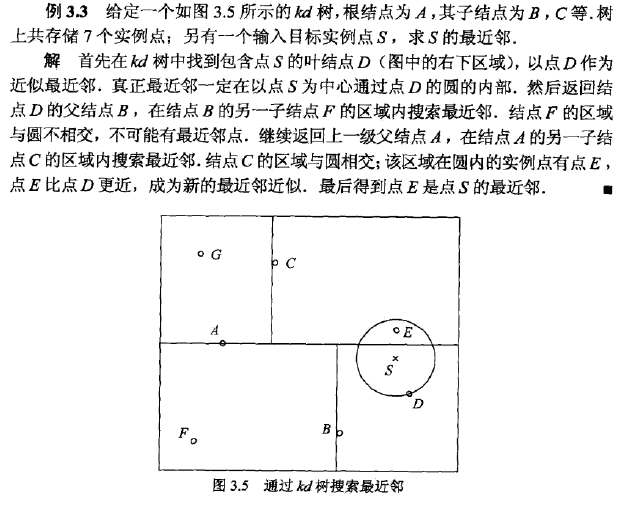
包含目标点的叶结点对应包含目标点的最小超矩形区域。依次叶结点的实例点作为当前最近点。目标点的最近邻一定在以目标点为中心并通过当前最近点的超球体的内部。然后返回当前节点的父结点,如果父结点的另一子结点的超矩形区域与超球体相交,那么在相交的区域内寻找与目标点更近的实例点。如果存在这样的点,将此点作为新的当前最近点。算法转到更上一级的父结点,继续上述过程。如果父结点的另一结点的超矩形区域与超球体不相交,或不存在比当前最近点更近的点,则停止搜索。
用kd树的最近邻搜索的算法
输入:已构造的kd树;目标点x;
输出:x的最近邻。
(1) 在kd树中找出包含目标点x的叶结点:从根结点出发,递归地向下访问kd树。若目标点x当前维的坐标小于切分点的坐标,则移动到左子结点,否则移动到右子结点。直到子结点为叶结点为止。
(2) 以此叶结点为“当前最近点”。
(3) 递归地向上回退,在每个结点进行一下操作:
a) 如果该结点保存的实例点比当前最近点距离目标点更近,则以该实例点为“当前最近点”。
b) 当前最近点一定存在于该结点一个子结点对应的区域。检查该子结点的父结点的另一结点对应的区域是否有更近的点。具体地,检查另一子结点对应的区域是否与以目标点为球心、以目标点与“当前最近点”间的距离为半径的超球体相交。
如果相交,可能在另一子结点对应的区域内存在距目标点更近的点,移动到另一个子结点。接着,递归地进行最近邻搜索;
如果不相交,向上回退。
(4) 当退回到根结点时,搜索结束。最后的“当前最近点”即为x的最近邻点。
如果实例点是随机分布的,kd树搜索的平均计算复杂度是O(logN),这里N是训练实例数。Kd树更适用于训练实例数远大于空间维数时的k近邻搜索。当空间维数接近训练实例数时,它的效率会迅速下降,几乎接近线性扫描。
















 797
797

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











