






 本文详细阐述了超外差雷达接收机的构成、主要质量指标如灵敏度、工作频带宽度和动态范围,以及噪声处理、接收机噪声系数、接收机带宽选择等内容,强调了信号处理技术在抑制噪声和杂波中的关键作用。
本文详细阐述了超外差雷达接收机的构成、主要质量指标如灵敏度、工作频带宽度和动态范围,以及噪声处理、接收机噪声系数、接收机带宽选择等内容,强调了信号处理技术在抑制噪声和杂波中的关键作用。
一、组成和主要质量指标
任务:不失真地放大所需的微弱信号,抑制不需要的其他信号。
其他信号包括:
噪声(noise):无意的;
干扰(jamming):一般认为是有意的;
杂波(clutter):近地物,如山川、海浪的回波。
我们通常所说的信号,一般是指真正的目标回波。
1、超外差雷达接收机
(1)高频部分
主要包括:
T/R:收发转换开关,存在于收发天线共用的系统中;
接收机保护器:超过接收机最大功率,进行强制限流,以免对接收机造成损坏;
低噪声高频高增益放大器
混频器及本振:实现下变频,将信号频率变为中频。
(2)中频部分
主要包括:
中频放大器:主要通过匹配滤波器实现,提高输出SNR。
AGC:Automatc Gain Control, 自动增益控制。
(3)视频
主要包含:
包络检波
放大
视频处理不是每个雷达系统所必须的,这根雷达用途有关系。比如像检测目标速度,就不能在视频一级取信号,因为速度检测需要获得多普勒频率,视频层面已经丢失了频率信息,无法获得多普勒频率。
2、主要质量指标
(1)灵敏度
雷达接收机的灵敏度通常用最小可检测信号功率Simin来表示。当接收机的输入信号功率达到Simin时,雷达就能检测到目标。灵敏度越高,雷达的作用距离就越远。
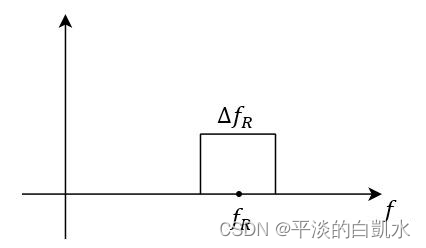
(2)工作频带宽度(接收机带宽)
即接收机带宽,表示接收机的瞬时工作频率范围。
两种表示方法:
fR表示雷达发射信号中心频率。
(3)动态范围
使接收机开始出现过载时的输入功率与最小可检测功率之比,叫做动态范围。
当输入信号太强时,接收机将发生饱和而失去放大作用,这种现象称为过载。
(4)中频选择和滤波特性
减少接收机噪声的关键参数是中频滤波特性。
如果中频滤波特性的带宽大于回波信号带宽,则过多的噪声进入接收机。 如果所选带宽比信号带宽窄,信号能量将会损失。
这两种情况都会使接收机输出信噪比减少。 所以,接收机中频滤波频率特性一般为匹配滤波器,输出信号噪声比最大。
(5)工作稳定性和频率稳定度
接收机的振幅特性、频率特性和相位特性等性能参数,受环境条件的影响越小约好。
大多数现代雷达系统需要对一串回波进行相参处理,因此,必须采用频率稳定度和相位稳定度极高的本机振荡器。
二、接收机噪声系数和灵敏度
1、接收机噪声
(1)噪声来源

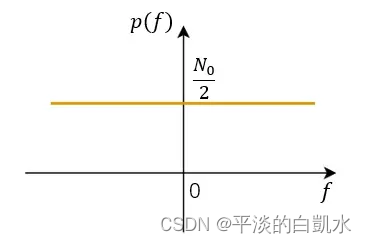
白噪声功率谱密度:
说明:
对于确定信号,通过傅立叶变化来反映信号的谱性质。
对于随机信号,一般通过功率谱密度函数来反映信号的谱性质。功率谱密度的积分就是信号功率。
这里的高斯,是指概率密度函数为指数函数形式。
(2)噪声带宽
又叫等效噪声功率谱带宽。
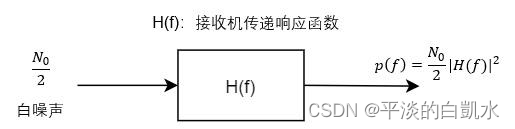
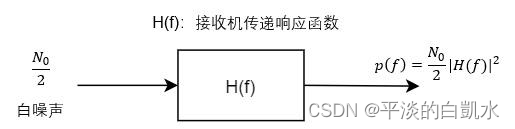
噪声通过接收机后,输出的噪声功率谱密度:
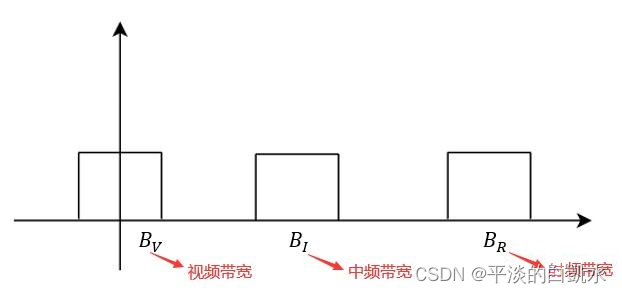
由公式可知,功率谱均匀的白噪声通过接收机之后,输出功率谱p(f)就不再是均匀的了,功率谱密度函数图形与 |H(f)|2 基本相同,如下图。
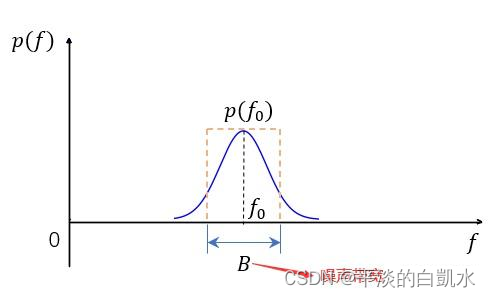
为了分析和计算方便,通常把这个不均匀的噪声功率谱等效为在一定带宽B内是均匀的功率谱。这个带宽B称为等效噪声功率谱宽度,一般简称噪声带宽。功率谱在频率轴上进行积分就得到噪声功率,假设其与噪声带宽内的功率相等,即可求得B。
需要说明的是,这里其实也可以用 3dB 带宽来衡量。
从上述公式可知,噪声带宽是受|H(f)|限制的,|H(f)|反映的是雷达接收机中频滤波器的传递响应函数。接收机中频滤波器又是根据![]() 来设计的,s表示雷达信号。也就是说信号本身的带宽就决定了中频滤波器怎么设计。因此,我们可以认为信号带宽、接收机带宽、噪声带宽是近似相等的。
来设计的,s表示雷达信号。也就是说信号本身的带宽就决定了中频滤波器怎么设计。因此,我们可以认为信号带宽、接收机带宽、噪声带宽是近似相等的。
2、噪声系数
定义:接收机输入端信号噪声比与输出端信号噪声比的比值。
噪声系数F的物理意义:表示由于接收机内部噪声的影响,使接收机输出端的信噪比相对于输入端的信噪比变差的倍数。
3、灵敏度
接收机灵敏度表示接收机接收微弱信号的能力。
灵敏度用接收机输入端的最小可检测信号功率Simin来表示。
其中,
M称为 “ 识别系数 ” 。
三、雷达接收机的高频部分
1、组成
(1)收发转换开关
(2)接收机保护器
(3)低噪声高频高增益放大器
(4)混频器
(5)本机振荡器
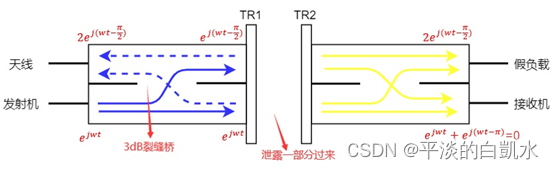
2、平衡式收发转换开关
对于收发共用的雷达系统,需要一个收发转换开关(简称TR)。在发射时,TR使天线与发射机接通,并与接收机断开,以免高功率发射信号进入接收机把高放或混频器烧毁。接收时,天线与接收机接通,并与发射机断开,以免因发射机旁路而使微弱的接收信号受损失。
主要的两种型式:分支线型收发开关和平衡式收发开关。
(1)发射状态时,保护放电管 TR1、TR2 放电,大部分能量被反射(图中蓝色虚线),只有一部分漏过放电管(图中黄线),在接收机处反向相消。如下图所示,图中标出了各个位置点的信号相位。
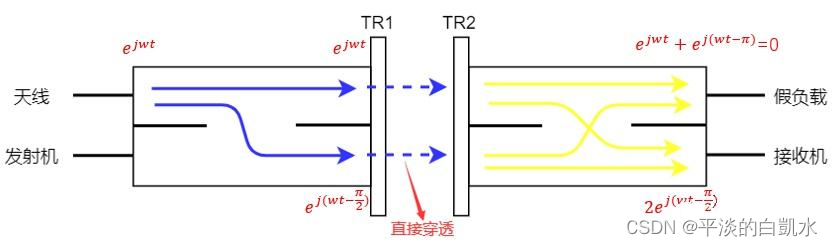
(2)接收状态时,保护放电管 TR1、TR2 不放电,天线接收到的信号在接收机处同相相加。
四、本机振荡器和自动频率控制
本机振荡器:LO,Local Oscillator
自动频率控制:AFC,Automatic Frequency Control
混频器原理:
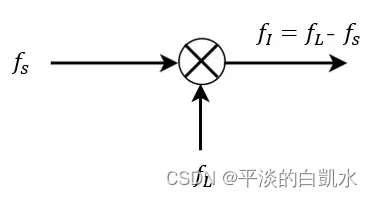
超外差式接收机利用本机振荡器和混频器把高频回波信号变换成便于滤波和处理的中频信号。
理想情况下,发射的高频信号fs和本振频率fL都是固定的,混频后二者之差也是固定不变的 “ 正确中频 ”fI。但在实际工作中,常规雷达发射机磁控管振荡器和接收机本机振荡器频率稳定度不高,容易受外界条件(温度、负载、电源等)的改变而变化,使混频后的实际中频偏离 “ 正确中频 ” fI 。可能超出中放通带,使接收机增益大大降低甚至不能正常工作。因此,必须采用 AFC,以保证混频器输出为 “ 正确中频 ” fI。
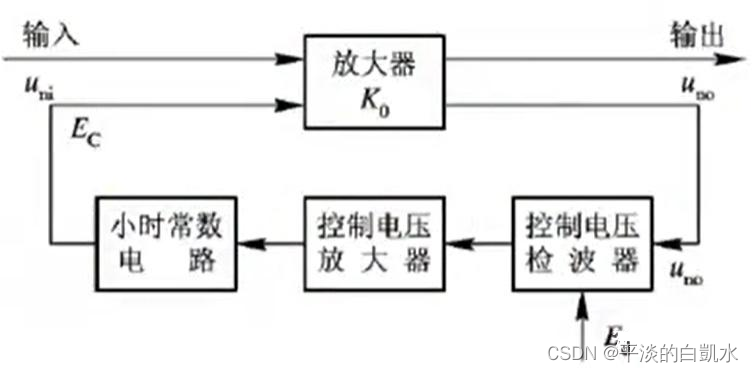
1、常规雷达本振与AFC
调谐本振跟踪发射。
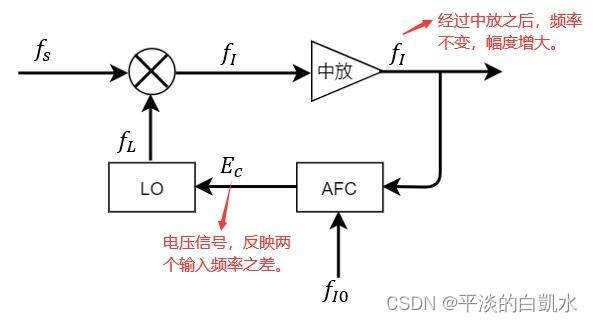
这里的 AFC 实际上是一个鉴频器,反映的是两个输入信号频率的差。
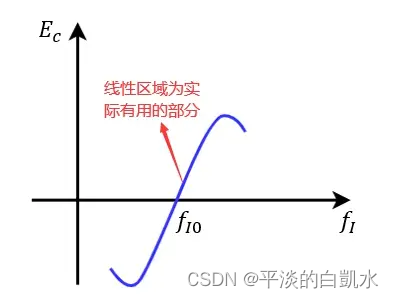
我们希望fI能稳定在一个值fI0 上面。鉴频曲线Ec随fI0 变化的曲线如下图所示。
数学模型:
![]()
其中,SA为鉴频曲线线性区域的斜率。
SL为一个常数。设计的时候要求,SA和SL符号相反。
2、现代雷达本振与AFC
调谐发射跟踪本振。
与调谐本振跟踪发射原理类似,目的都是为了使本振与发射信号的频率动态稳定在中频fI上。
五、接收机的动态范围和增益控制
1、动态范围
接收机的动态范围表示接收机能够正常工作所容许的输入信号强度范围。信号太弱,它不能检测出来;信号太强,接收机会发生饱和过载。
(1)定义
D表示接收机的动态范围,单位dB;
Pimax最大接收信号功率;
Pimin最小接收信号功率,即灵敏度。
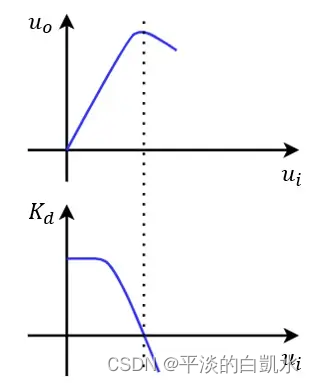
(2)饱和过载
ui:接收机输入信号;uo:接收机输出信号。
Kd:增量增益
若Kd≤0 ,饱和过载。
2、增益控制
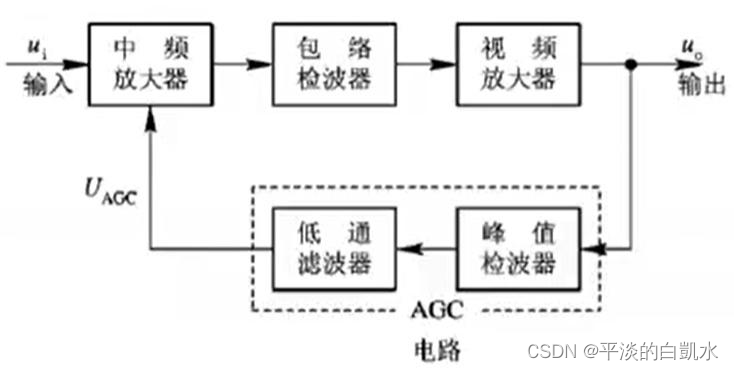
(1)自动增益控制 AGC
目的是为了使接收机的输出不要受接收机输入影响太大,引起剧烈变化。
从视频取反馈控制信号,最终控制中频放大器的增益。
(2)瞬时自动增益控制 IAGC
目的是使大功率干扰受到衰减,而维持目标信号的增益尽量不变。
直接从中频放大器的输出端取反馈控制信号。因此,IAGC 比 AGC 反应更快。
(3)时间与灵敏度控制电路 STC
又称为进程增益控制。
实际上是一个使接收机灵敏度随时间而变化的控制电路,可以用来防止进程杂波(海浪杂波、近地物杂波等)干扰所引起的中频放大器过载。
六、滤波和接收机带宽
1、中频放大器
匹配滤波器如下图所示。
满足公式:
冲击响应函数:
![]()
也就是说,匹配滤波器实际上是根据雷达发射信号s(t)设计的。
传递响应函数:
匹配滤波器是在白噪声背景中检测信号的最佳线性滤波器。t0是使滤波器实际上能够实现所必须的延迟时间,输出信噪比在t0 时刻达到最大。
匹配滤波器的最大输出信噪比:

其中, N0/2 为白噪声功率谱密度。E为输入信号能量,根据帕塞瓦尔定理:

2、单个脉冲信号的匹配滤波
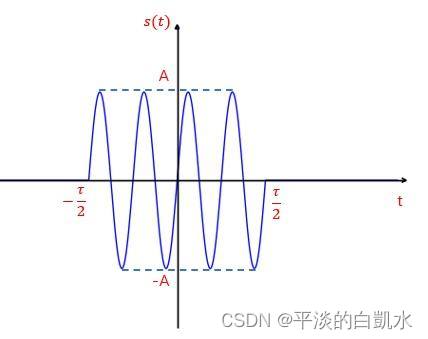
假设矩形脉冲幅度为A,脉宽为τ,信号波形为:
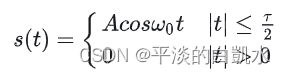
经傅里叶变换,可得信号频谱:

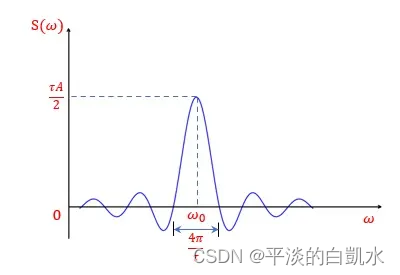
匹配滤波器的传递响应函数:


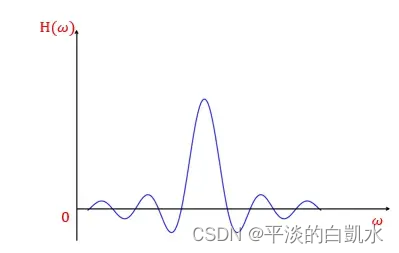
需要补充的是,传递响应函数可以写成如下形式:
![]()
|H(ω)| 表示幅频特性,Φ(ω) 表示相频特性。我们说某个信号能否通过滤波器,是由滤波器的幅频特性决定的。相频特性反映输出信号相位的变换。具体可以参考《信号与系统》。
3、准匹配滤波
理想匹配滤波器的特性一般比较难以实现,因此,需要考虑它的近似实现,即采用准匹配滤波器。
准匹配滤波器是指实际上容易实现的几种典型频率特性。通常可以用矩形、高斯型或其他形状的频率特性来作近似。
失配损失ρ:准匹配滤波器的最大信噪比与理想匹配滤波器输出的最大信噪比的比值。

各种准匹配滤波器:
|
|

其中,带宽是指 3dB 带宽。
4、接收机带宽选择
通过匹配滤波得到了最佳接收机带宽Bopt,那么真正的接收机带宽跟Bopt有什么关系呢?
接收机带宽会影响接收机输出信噪比和波形失真。选用最佳带宽时,灵敏度可以最高,但波形失真较大,会影响测距精度。因此,接收机带宽的选择应该根据雷达的不同用途而定。
(1)警戒雷达
以发现目标为主要任务,这类雷达的主要要求是接收机灵敏度尽可能高。雷达要想发现目标就要求接收机的输出信噪比大于等于最小可检测信噪比,即要求满足下列不等式:
警戒雷达以尽可能检测到目标为前提,这就要求接收机灵敏度要高,而对波形失真要求不严格,因此要求接收机输出信噪比最大,即尽可能增大不等式左边的值。所以,![]() 应取为最佳带宽Bopt,但考虑到发射信号和本振频率的漂移,需要加宽一个数值
应取为最佳带宽Bopt,但考虑到发射信号和本振频率的漂移,需要加宽一个数值![]() ,应取为:
,应取为:
![]()
![]() : 剩余失谐。
: 剩余失谐。
射频到中频带宽是不变的,再到视频,在零频处,正负都有。但我们在设计基带滤波器的时候,都是说从零频到某个值。
另外,接收机视频噪声的影响很小。因此,视频带宽B只要满足:
 即可。
即可。
(2)跟踪雷达
这类雷达是根据目标回波前沿位置来进行精确测距,主要要求是波形失真小,其次才是要求接收机灵敏度高。如果接收机带宽比信号带宽窄,信号能量就会损失,不能检测到准确的回波前沿。因此,要求接收机带宽大于最佳带宽,一般取为:
τ为发射信号脉冲宽度。
转自https://www.zhihu.com/column/c_1249842810234593280

















 4万+
4万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









