






YOLOV5 网络结构
YoloV5 vs YoloV3
(1)输入端:Mosaic数据增强、自适应锚框计算
(2)Backbone:Focus结构,CSP结构
(3)Neck:FPN+PAN结构
(4)Prediction:GIOU_Loss
1、输出端:
(1)Mosaic数据增强
提出的作者也是来自Yolov5团队的成员,不过,随机缩放、随机裁剪、随机排布的方式进行拼接,对于小目标的检测效果还是很不错的
(2)自适应锚框计算
在Yolo算法中,针对不同的数据集,都会有初始设定长宽的锚框。
在网络训练中,网络在初始锚框的基础上输出预测框,进而和真实框groundtruth进行比对,计算两者差距,再反向更新,迭代网络参数。
因此初始锚框也是比较重要的一部分,比如Yolov5在Coco数据集上初始设定的锚框:
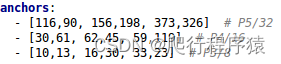
在Yolov3、Yolov4中,训练不同的数据集时,计算初始锚框的值是通过单独的程序运行的。
但Yolov5中将此功能嵌入到代码中,每次训练时,自适应的计算不同训练集中的最佳锚框值。
当然,如果觉得计算的锚框效果不是很好,也可以在代码中将自动计算锚框功能关闭。
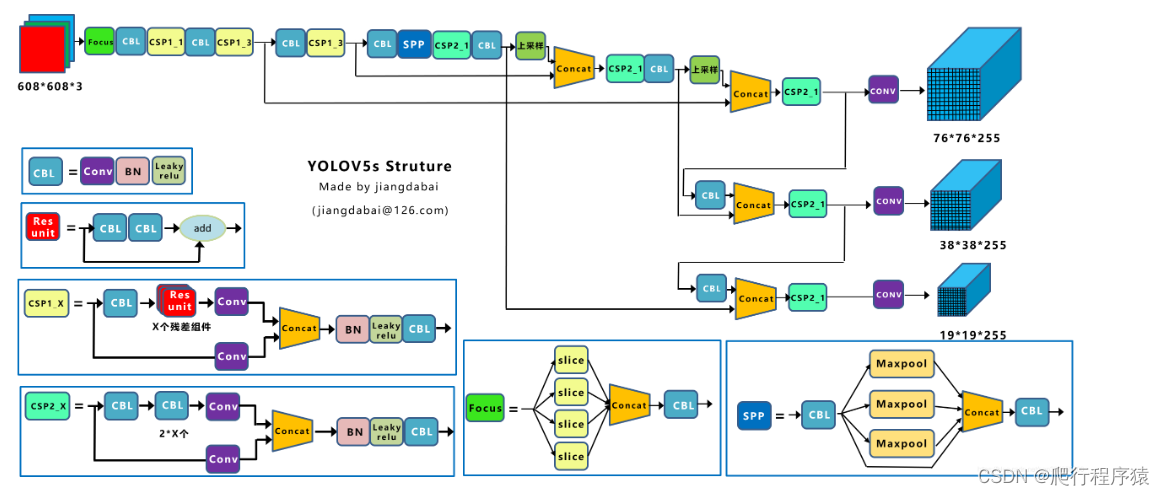
2、Backbone:
以Yolov5s的结构为例,原始608×608×3的图像输入Focus结构,采用切片操作,先变成304×304×12的特征图,再经过一次32个卷积核的卷积操作,最终变成304×304×32的特征图。
需要注意的是:Yolov5s的Focus结构最后使用了32个卷积核,而其他三种结构,使用的数量有所增加,先注意下,后面会讲解到四种结构的不同点。
(1) CSP结构
Yolov4网络结构中,借鉴了CSPNet的设计思路,在主干网络中设计了CSP结构。
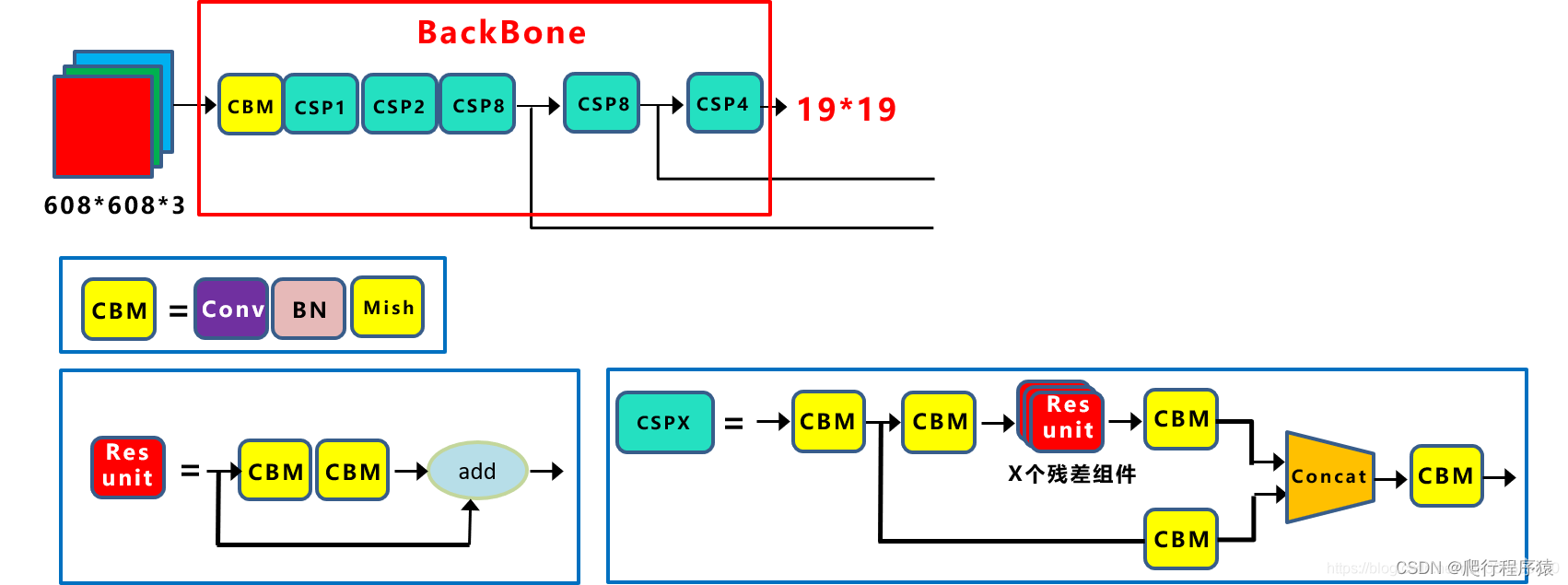
Yolov5与Yolov4不同点在于,Yolov4中只有主干网络使用了CSP结构,而Yolov5中设计了两种CSP结构,以Yolov5s网络为例,以CSP1_X结构应用于Backbone主干网络,另一种CSP2_X结构则应用于Neck中。
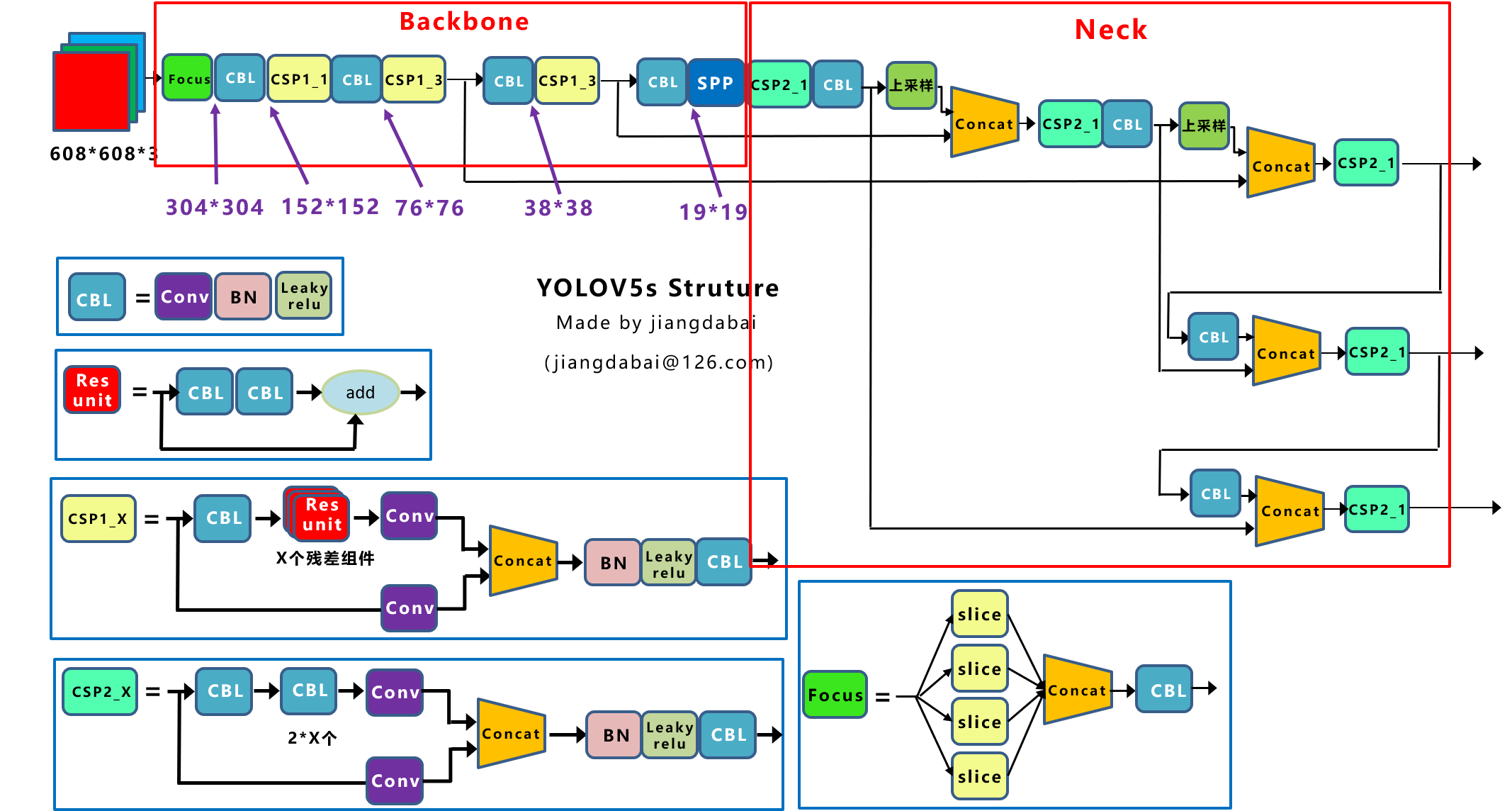
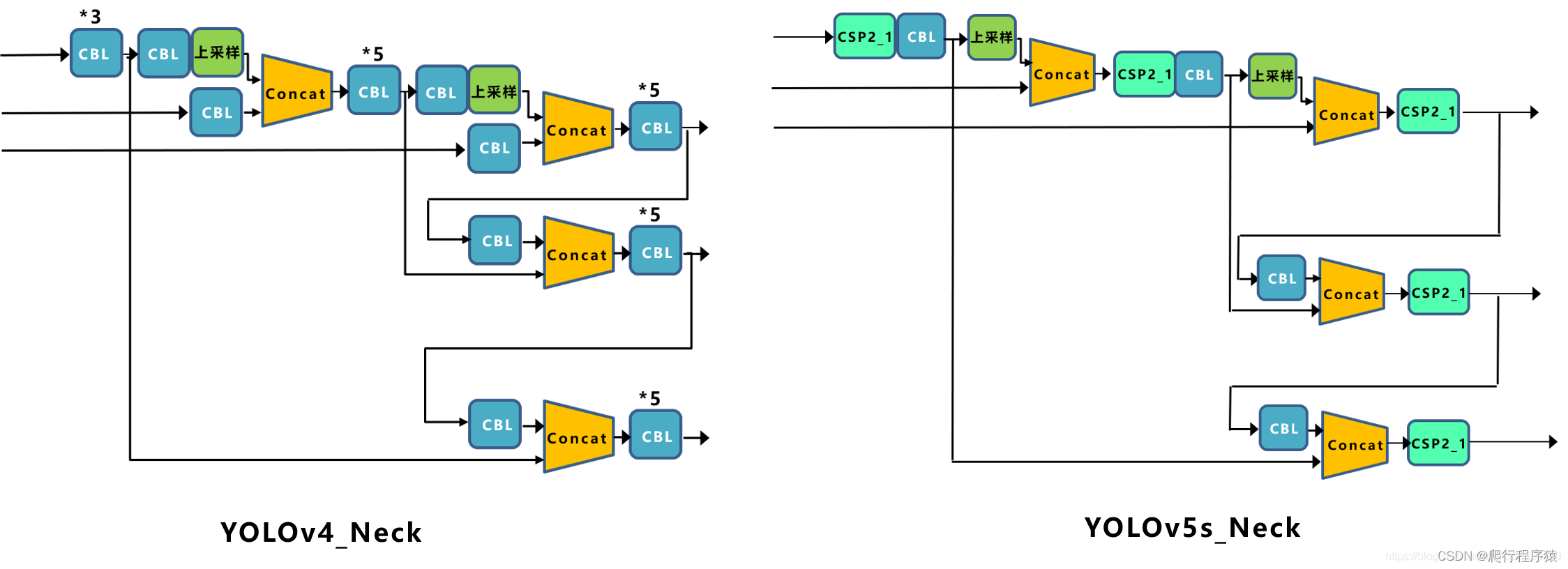
3、Neck端
(1)FPN + PAN
Yolov5和Yolov4的不同点在于,Yolov4的Neck中,采用的都是普通的卷积操作。
而Yolov5的Neck结构中,采用借鉴CSPNet设计的CSP2结构,加强网络特征融合的能力。
4、Prediction 端
Bounding box损失函数
在《深入浅出Yolo系列之Yolov3&Yolov4核心基础完整讲解》中,大白详细的讲解了IOU_Loss,以及进化版的GIOU_Loss,DIOU_Loss,以及CIOU_Loss。
Yolov5中采用其中的CIOU_Loss做Bounding box的损失函数。
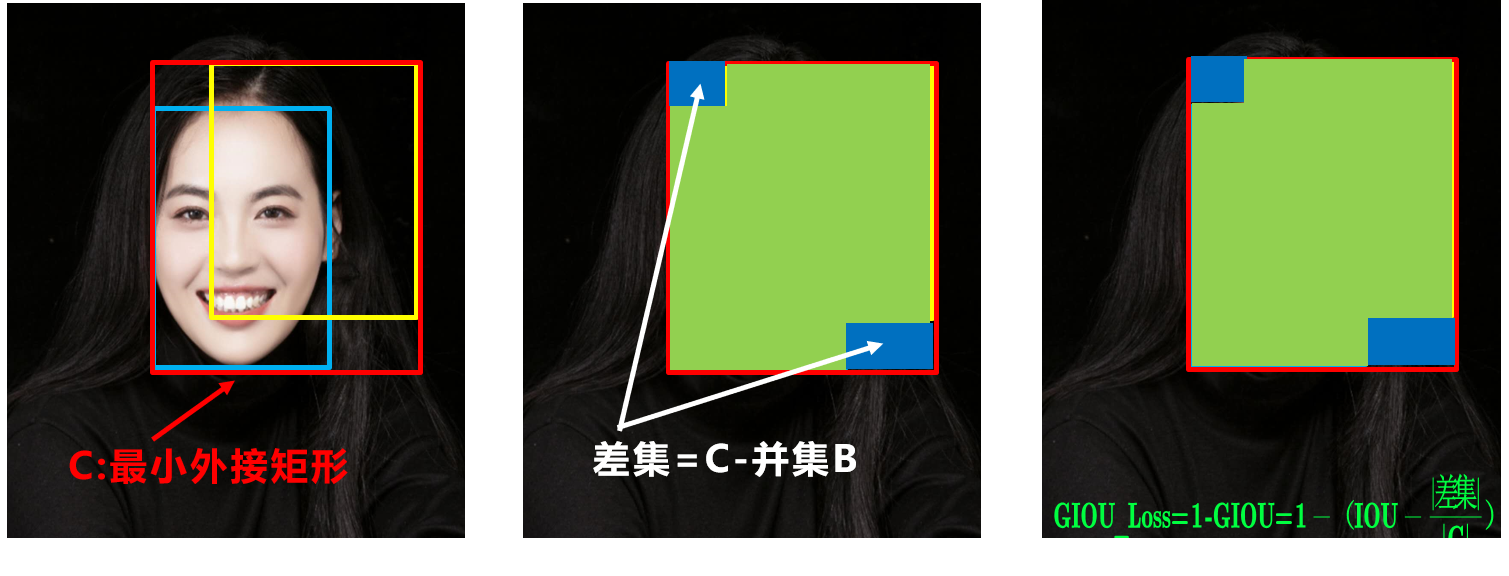
Yolov4中也采用CIOU_Loss作为目标Bounding box的损失函数。
















 1万+
1万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









