







注:本文作为学习笔记,内容取材并整理自日本神奈川工科大学名誉教授安部正人(あべ·まさと)的著作:《自動車の運動と制御——車両運動力学の理論形成と応用[第2版」》
汽车运行的工况很复杂,需要仿真的问题无穷无尽:操稳,平顺,NVH...无数种工况都需要进行处理。于是,轮胎动力学就成为了一门永远都不会有标准答案的学问——而这只有一个原因——轮胎是汽车与路面接触的唯一部件,汽车的动力来源就是取自轮胎。
所以,安部正人直接把轮胎力学作为车辆运动力学控制理论开篇的第一章,排在了车辆动力学基础之前,足见这门学问的分量。
如果你喜欢数学,觉得数学学不够,那就来研究轮胎力学吧!总有一天,你会体验到自己的学习极限并感到深深的绝望!
达芬奇说:力学是数学的天堂,有什么样的数学,就有什么样的力学。
牛顿说:几何学建立在力学实践之上,它无非是普通力学的一部分。
轮胎力学,这不是一门夕阳学问,MF,Unitire...目前全世界都没有一个非常完美的轮胎理论能够解决目前轮胎建模中遇到的所有问题,这里仍然充满了挑战,挑战永无止境。壹
综述地面上行驶的车辆,从其运动形式可以大致分为以下两种:
- 一种是完全被预先设置在地面上的轨道所束缚而行驶,以铁路车辆为代表。
- 另一种是不受轨道等限制,可以在地面上通过车轮的操舵(掌舵操作)自由行驶的车辆:飞机可以在大气中不受其他限制的情况下自由飞行,船舶在水面上同样可以通过舵的操作自由航行。
飞机、船舶,以及能够在地面上通过车轮的操舵自由行驶的车辆,都不必拘泥于预先规定的轨道等,可以在自己的意识下自由地在空间或平面内进行运动。
从运动力学的角度来看,飞机、船舶、汽车这三个运动体都可以说是具有相当本质的共性,即接受由自己的运动产生的力,利用这种力进行自己希望的运动。
更具体地说,飞机翅膀和大气的相对运动带来升力,船舶船体和水的相对运动产生升力,车辆根据车辆和地面的相对运动,车轮上工作受力,并自由运动,发挥其功能。
如上所述,上述三者的运动体的运动和控制是与运动体的本质功能有关的问题,关于飞机作为航空(运动)力学,关于船舶作为船体运动力学被体系化。我们今后也可以把运动和控制作为问题的车辆,看作和飞机和船舶一样,通过自己的运动自己制造力,在地上自由地进行独立运动的对象来处理。
为了处理这样的车辆运动和控制问题,这里就要试设想一下典型的车辆的运动动力学模型:
这个模型是操纵前方2轮和后方2轮的车轮被安装在看做是刚体的车身上的车辆——可以安装车轮,从而不直接沿着轨道而能自由行驶的车辆。除了一般最熟悉的乘用车、大型卡车、公共汽车等之外,还有建设用车辆、产业用车辆等特殊车辆。
乍一看来,似乎不能直接讨论这些运动。但是。如果以这些车辆的基本运行为主题的话。通过将车辆抽象化到最一般、最简单的四轮车当中来思考,可以获得很多基本的车辆运动知识。
在上述的车辆动力学模型中,车轮不具有重量,被认为是刚性的车身代表车辆的重量。现在,假设以该车辆的重心点为原点,为车辆建立坐标系,车辆的前后方向是x轴,上下方向z轴,左右方向为y轴。
有了这个坐标为基准,就可以将车辆运动的自由度作为三维空间内刚体的运动分类为以下6种。
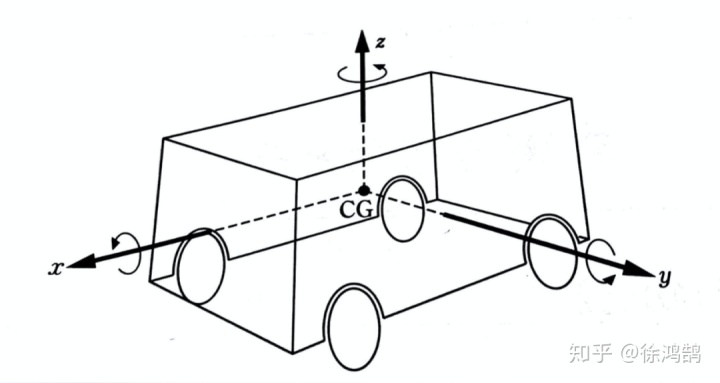
① z方向的平移,上下运动(Up & Down)
② y方向的平移,左右运动(Lateral)
③ x方向的平移,前后运动(longitudinal)
④ x轴的旋转运动(Rolling)
⑤ y轴的旋转运动(Pitching)
⑥ z轴的旋转运动(Yawing)
再进一步,把六项运动分为两部分加以考虑:一种是.①、③、⑤的运动,这些是与操舵没有任何直接关系的。
- ①的运动具体来说是由于路面不平而产生的上下方向运动,与行驶中车辆的乘坐感觉有关。
- ③的运动是前后方向的直线运动,包括油门和刹车的车辆驱动和制动。
- ⑤是伴随着上下方向的路面不齐和③的运动而产生的运动,这也与车辆的乘坐舒适度有关。
与此相对,②、④、⑥是另外一类与操舵相关的:
- ②的运动是通过操舵来进行的车辆横向运动
- ⑥的运动是通过操舵来改变车辆方向的运动
- ④的运动伴随着②和⑥的运动而产生的车辆滚动。
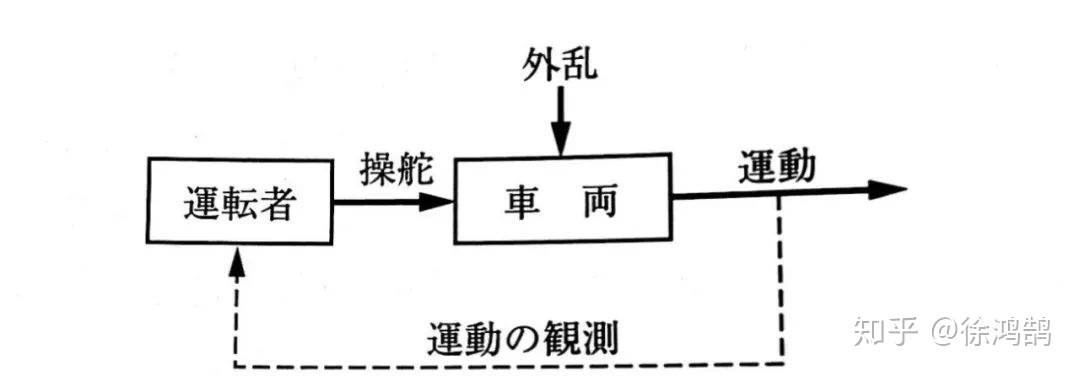
通常的车辆由车上的驾驶员控制其运动。根据驾驶员的操舵,车辆按照自己的运动力学的固有特性,横向运动,围绕垂直z轴的Yawing运动,并伴随着这个,车身进行滚动运动。
司机并不是完全没有意义的操舵。司机可以看到前方道路,了解行驶目标路线的情况,或者在道路前方设定自己应该走的目标路线。与此同时,司机需要判断自己对照目标路线处于怎样的位置,基于这些信息,驾驶员自行判断是否进行适当的操舵,从而让车辆按照指定的目标路线或驾驶员自己设定的目标路线运动。
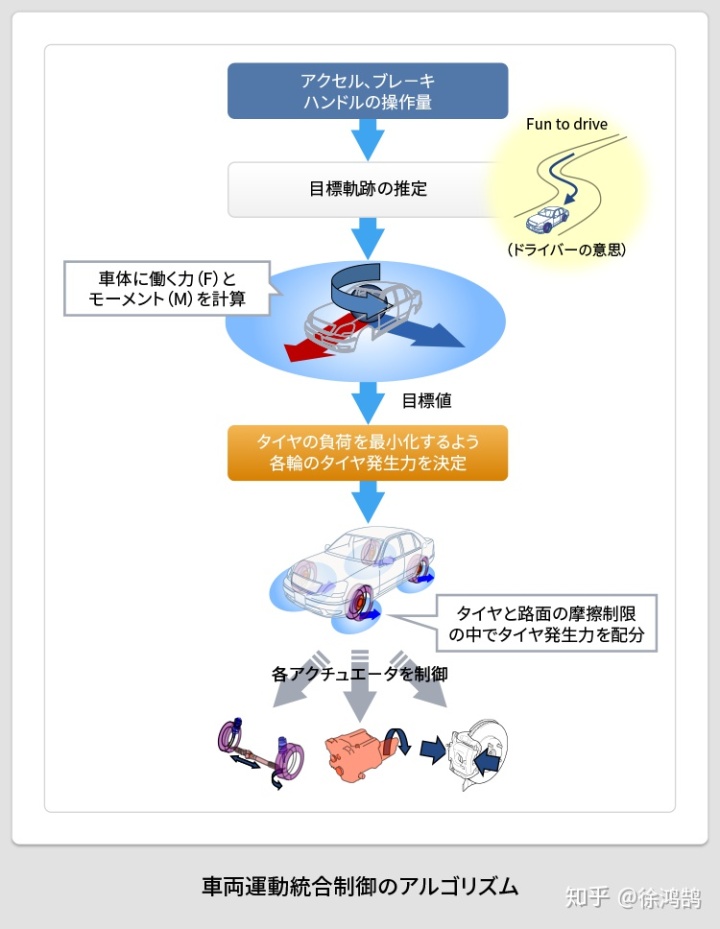
下图展示了这样的车辆运动与控制之间的关系。
这样,不受地面上设定的轨道等直接的约束的影响,通过操舵在平面内自由运动的车辆,通过人或其他方法受到适当的控制,得以进行有意义的运动。我们的兴趣的中心和研究对象就更加明确了:
- 通过观察车辆对某一特定的操舵的运动的反应,而明确的车辆本身就具有的独特的运动力学性质。
- 具有某种运动力学性质的车辆,在通过人或其他方法得到控制的情况下,会达成怎样的运动。
- 如果是受人控制的车辆,怎样的具有运动力学性的车辆对控制者来说容易控制。
这些问题将是本书所研究的重点。壹
轮胎研究对象在前一节中我们谈到,车辆运动不直接拘泥于预先放置在地上的轨道,可以在自己的意志下,自由独立于水平面内运动。并且,车辆运动的力是由车辆对地面相对运动产生的。车辆和地面的接触点是车轮。车轮如果在与旋转面成直角的方向上具有速度分量,则会受到垂直于其行驶方向的作用力。也就是说,上述使车辆运动成为可能的力量是指,通过车辆和地面的相对运动,车轮从地面受到的力——这正好对应于在飞机运动中垂直于机翼行进方向工作的升力和在船体转向时,垂直传锑运动方向的浮力(对船体来说是侧向的力)。
这样,作为对象处理的车辆所安装的车轮,不仅承担着支撑着车身一边转动,对地面前后方向产生驱动和制动力的作用,还承担着使这种车辆的本质功能即自立运动成为可能的作用。
因此,要处理车辆的运动和控制问题,就必须事先掌握使其运动和控制成为可能的、关于在车轮上工作的能力的知识。由此,本章主要阐明了车轮和地面相对运动产生的力的产生机制及其力的性质——这便是轮胎力学。
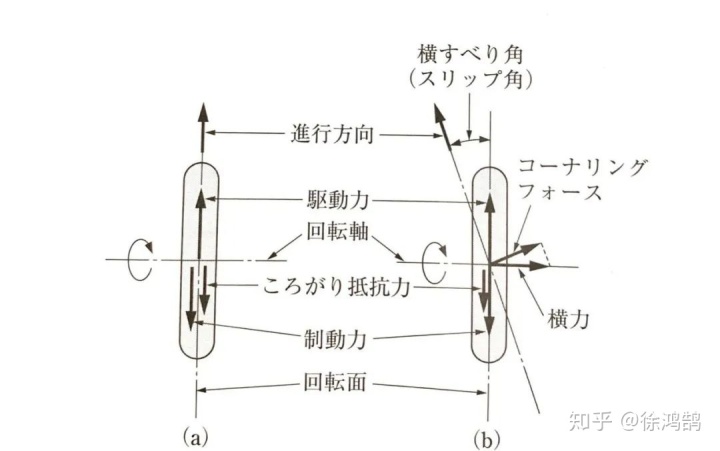
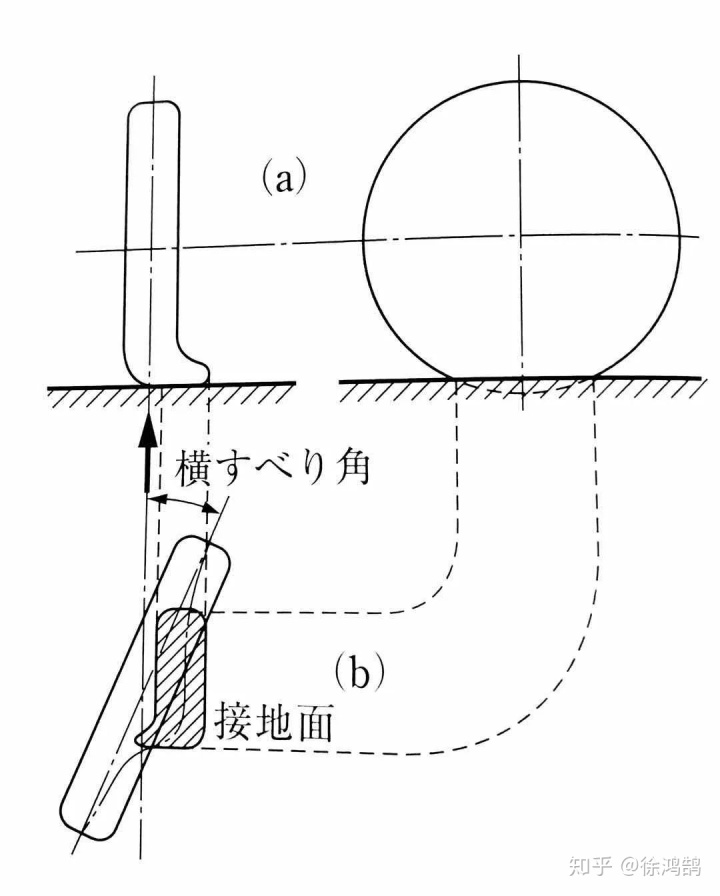
当车辆直线行驶时,车轮的行驶方向通常位于旋转平面内。车轮的旋转平面与其行驶方向时一致的(图a所示)。当车辆横摆或转弯时,车轮的行驶方向就会跑出其旋转平面(图b所示)。
图b是发生侧滑的情况,车轮旋转平面的垂直方向将产生力——这可以看作是车轮发生侧向滑动时抵抗侧滑的反作用力——这是车辆实现独立运动所必须依赖的侧向力。
垂直于车轮行驶方向的分力被称为侧偏力,当侧偏角(slip angle,车轮行驶方向和车轮旋转平面之间的夹角)很小的时候,可以认为侧偏力和侧向力相同。
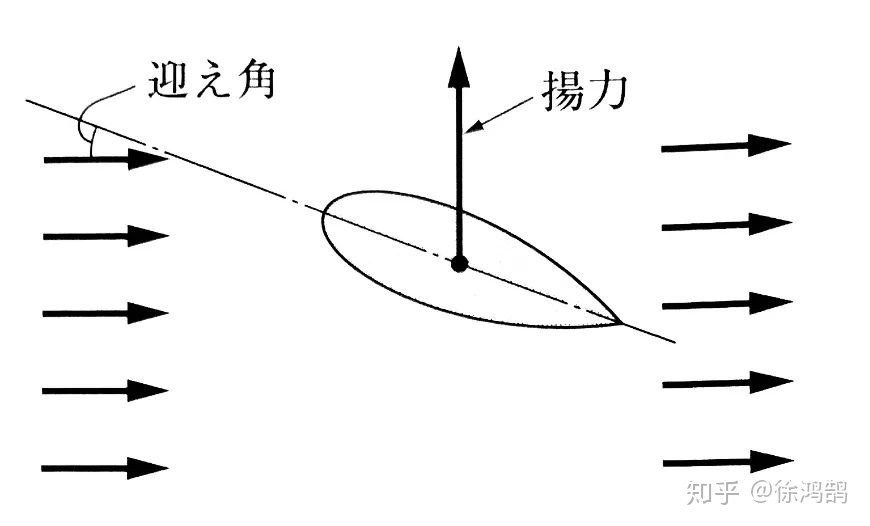
这种侧向力可以被看作是流体力学当中的概念:流体中以迎面角前进的物体受到的升力。
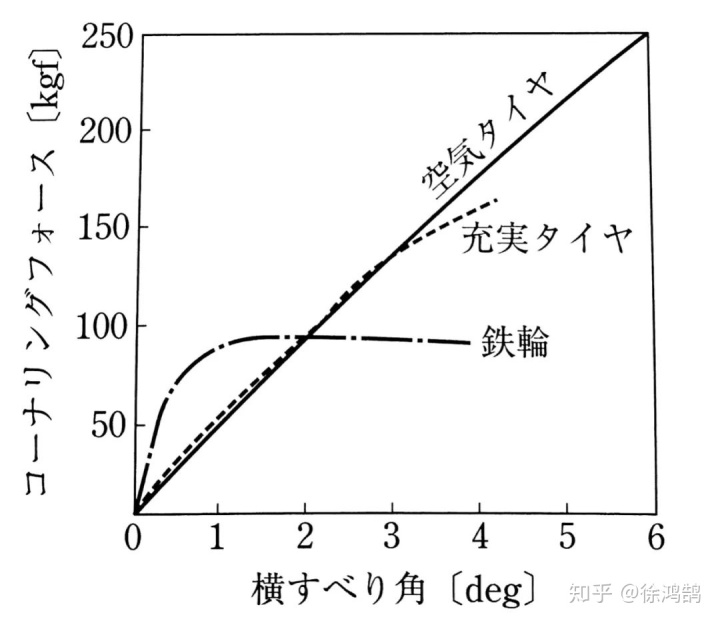
无论是哪种轮胎,在做伴有侧滑的转动时,都会产生垂直于车轮旋转面的力。上图对比了不同侧偏角的情况下,充气橡胶轮胎,实心橡胶轮胎,铁车轮产生的侧向力的差异。
很容易会发现,铁车轮所能产生的最大侧向力,还不到橡胶轮胎的1/3。而且,充气橡胶轮胎所能产生的侧向力要大于实心橡胶轮胎车轮,侧向力相对侧偏角也更加线性。
对于车辆独立运动,伴有侧滑的车轮能产生的侧向力越大越好。因此,可在无约束的平面上自由运动的车辆通常都装载充气轮胎——这不光有利于乘坐舒适性,而且还有利于获得操纵车辆所需的侧向力。
一般而言,轮胎与地面的接触产生力。上图显示了一个伴有侧向滑动的轮胎及其在工作状态下的变形。图a表示从轮胎的纵向和侧向观察到的轮胎变形,图b表示俯视观察到的轮胎接地区和外周的变形。
从轮胎接地区的前部看,轮胎变形的方向几乎与轮胎行驶的方向平行,在这一区域,轮胎和地面之间并未产生相对滑动。而轮胎的后端相对轮胎的行驶方向则产生了很大的侧向变形和相对滑动。当侧偏角增大时:
轮胎接地区的前端仍然保持与轮胎行驶方向平行。
到了接地区中心,侧向变形在接地区的某点处达到最大。
此后,轮胎接地区滑离接地中心线,产生相对滑动,侧向变形不再增加。如果侧偏角再进一步增加:
侧向变形的最大点会迅速地前移。当轮胎的侧偏角达到10°-12°时:接地区将不再平行于轮胎行驶方向——而是前后部都产生与轮心几乎对称的变形。此时,可以认为接地区的所有位置都产生了与地面的相对滑动。
轮胎的侧向变形产生了一个作用于轮胎接地区的侧向力(lateral force),它的分布与轮胎变形的分布对应。在小侧偏角的情况下,轮胎的侧向力(垂直于车轮旋转方向)通常被看作是侧偏力(cornering force,垂直于车轮行驶方向)。
从轮胎的侧向变形来看,产生的侧向力的作用点并不一定与轮胎接地区的中心重合,因此会绕轮胎接地区的中心产生一个力矩,即所谓的"回正力矩"(self aligning torque)——其作用是使轮胎侧偏角减少。于是,我们就引出了轮胎力学当中,真正重要的两个研究对象:
- 侧向力(lateral force)
- 回正力矩(self aligning torque)
侧向力和回正力矩特性可以被统一称作轮胎的侧偏特性。我们在下一节将详细讨论它。
值得一提的是,从悬挂几何的角度来讲,轮胎的侧向力可能不单单来自于轮胎的侧偏角,轮胎的外倾角(轮胎旋转平面与铅锤面之间的夹角)同样可以带来侧向力。
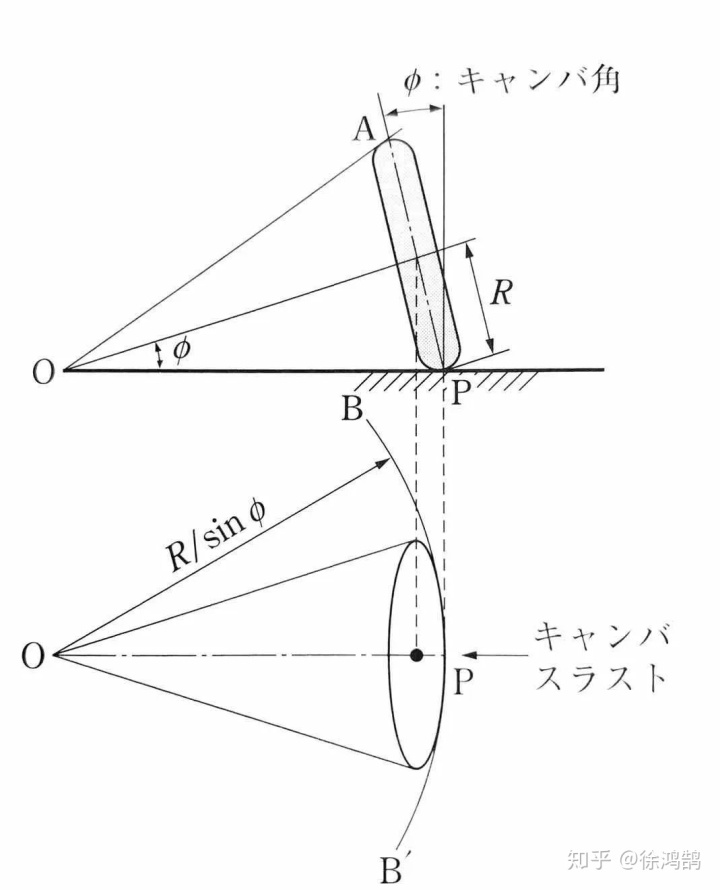
图:具有外倾角的轮胎带来的侧向力。
如果轮胎保持外倾角Φ(camber angle)不变,并在水平面内自由转动,则轨迹应该是半径为R/sinΦ的一段圆弧。如果轮胎被悬挂几何限制不能做这样的圆周运动,而是被限定只能做直线运动,则就会受到图示的力P的作用,这个由轮胎相对地面外倾而产生的侧向力被称作为外倾侧向力(camber thrust)。贰
Fiala理论(侧偏特性)有关轮胎侧滑产生侧向力的分析中,Fiala所提出的数学模型广为流传,并通常被称作关于轮胎侧偏特性的Fiala理论。Fiala理论被看作是揭示轮胎侧偏特性的基本理论之一。
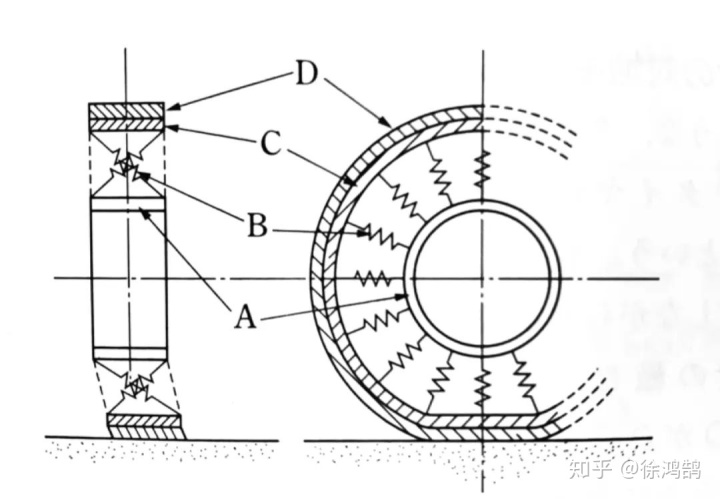
Fiala的轮胎结构模型如上图所示:
A,被看作刚体,相当于车轮的轮辋;
B,为等效弹簧,分别在径向和侧向等效替代可弹性变形的充气内胎和轮胎侧壁;
C,相当于较薄的轮胎胎面基底,并连接轮胎两边的侧壁;
D,相当于轮胎胎面橡胶,但它不是环状的连续体,而是由大量环绕轮胎周围的独立弹性体组成。
当侧向力作用于轮胎接地区时,轮胎将发生侧向变形。由于轮辋是刚体,不发生变形,而轮胎胎面基底则会产生侧向的弯曲(剪切)变形。
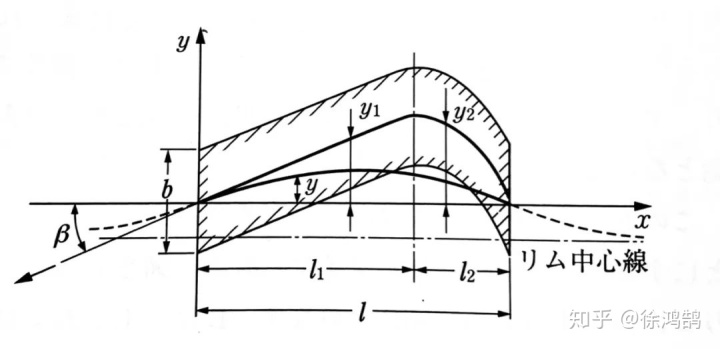
如图所示,x轴平行于轮辋中心线,y轴表示轮胎胎面基底偏离x轴的侧向位移。y1代表在0≤x≤L1范围内接地区中心线偏离x轴的侧向位移,y2表示在L1≤x≤L范围内接地区中心线偏离x轴的侧向位移。β为轮胎的侧偏角,L为接地区的长度,b为接地区的宽度。而且:
- 在L1范围内,轮胎与地面之间没有相对滑动
- 在L2范围(L1~L),轮胎与地面发生相对滑动
我们继续建模,来观察轮胎胎面基底的侧向变形y。
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章















 2684
2684











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









