







博客转载自:http://blog.csdn.net/app_12062011/article/details/78131318
点云分割
点云分割可谓点云处理的精髓,也是三维图像相对二维图像最大优势的体现。
点云分割的目的提取点云中的不同物体,从而实现分而治之,突出重点,单独处理的目的。而在现实点云数据中,往往对场景中的物体有一定先验知识。比如:桌面墙面多半是大平面,桌上的罐子应该是圆柱体,长方体的盒子可能是牛奶盒......对于复杂场景中的物体,其几何外形可以归结于简单的几何形状。这为分割带来了巨大的便利,因为简单几何形状是可以用方程来描述的,或者说,可以用有限的参数来描述复杂的物体。而方程则代表的物体的拓扑抽象。于是,RanSaC算法可以很好的将此类物体分割出来。
RanSaC算法
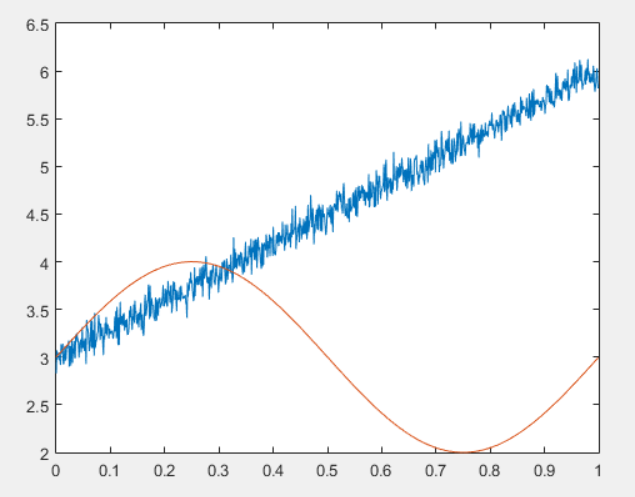
RanSaC算法(随机采样一致)原本是用于数据处理的一种经典算法,其作用是在大量噪声情况下,提取物体中特定的成分。下图是对RanSaC算法效果的说明。图中有一些点显然是满足某条直线的,另外有一团点是纯噪声。目的是在大量噪声的情况下找到直线方程,此时噪声数据量是直线的3倍。
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章
















 1万+
1万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









