








 来源 | 中国公路学报
知圈 | 进“汽车软件社群”,请加微信13636581676,备注软件
来源 | 中国公路学报
知圈 | 进“汽车软件社群”,请加微信13636581676,备注软件
导读:
自动驾驶汽车能够提高交通流稳定性和道路通行能力,降低交通能耗以及交通事故,是未来交通技术的发展趋势。自动驾驶技术以车辆对驾驶环境的感知为基础。其中,对前车运动状态的精确感知是关键,现有方法主要包括雷达测距技术和视觉计算技术两大类。雷达传感器的缺点在于无法自主辨认测量目标,而摄像传感器应用图像处理技术能够实现高精度目标识别,尤其是双目视觉技术,能够同时实现目标识别与距离测量功能,近年来在理论研究以及工程应用领域受到广泛的关注
然而,目前双目视觉技术在自动驾驶领域的应用仍面临诸多挑战。由于存在不稳定光照干扰、遮挡、弱纹理区域歧义匹配等问题,导致双目视觉系统对前车目标的识别不稳定,因而造成对前车运动状态的感知出现不可预见的偏差。尽管学者们在双目视觉的目标检测与跟踪算法精度提升方面做了大量的努力,双目视觉系统依然无法完全避免出现目标识别偏差的问题。 为了消除目标识别不稳定对双目视觉计算带来的干扰,本文提出一种新的解决方案,应用扩展卡尔曼滤波算法,对双目视觉系统测量的前方车辆运动状态数据进行实时平滑,修正前方车辆目标歧义匹配带来的测距偏差,为自动驾驶车辆的控制系统提供可靠的实时跟驰状态信息 方法论 本文提出的跟驰状态实时感知系统,首先应用双目相机实时获取前方车辆图片,然后通过双目视觉原理计算车辆的跟驰距离,随后应用扩展卡尔曼滤波算法对跟驰距离进行平滑,修正由双目系统工作异常造成的测量偏差。最后,根据修正后的跟驰距离估计值计算前后车辆的速度差,输出跟驰状态数据。下面对该系统的总体架构、双目视觉测距模型以及滤波平滑算法分别进行介绍。
1.1 跟驰状态实时感知系统架构 本文提出的跟驰状态实时感知系统包括硬件模块和软件模块。硬件模块由双目相机、差分GPS接收机以及便携式计算机组成。软件模块用于控制双目相机获取目标车辆的图片。
1.1.1 硬件模块 如图1所示,研究人员将两组双目相机固定在刚性杆件上。其中,12mm焦距双目相机固定在横轴内侧,25mm焦距双目相机固定在横轴外侧。刚性杆件固定在跟驰车辆的车顶,双目相机与便携式计算机连接,并由软件模块控制以每秒3张照片的速度对前方车辆运动场景进行拍摄。
方法论 本文提出的跟驰状态实时感知系统,首先应用双目相机实时获取前方车辆图片,然后通过双目视觉原理计算车辆的跟驰距离,随后应用扩展卡尔曼滤波算法对跟驰距离进行平滑,修正由双目系统工作异常造成的测量偏差。最后,根据修正后的跟驰距离估计值计算前后车辆的速度差,输出跟驰状态数据。下面对该系统的总体架构、双目视觉测距模型以及滤波平滑算法分别进行介绍。
1.1 跟驰状态实时感知系统架构 本文提出的跟驰状态实时感知系统包括硬件模块和软件模块。硬件模块由双目相机、差分GPS接收机以及便携式计算机组成。软件模块用于控制双目相机获取目标车辆的图片。
1.1.1 硬件模块 如图1所示,研究人员将两组双目相机固定在刚性杆件上。其中,12mm焦距双目相机固定在横轴内侧,25mm焦距双目相机固定在横轴外侧。刚性杆件固定在跟驰车辆的车顶,双目相机与便携式计算机连接,并由软件模块控制以每秒3张照片的速度对前方车辆运动场景进行拍摄。
 图1 双目视觉设备
图1 双目视觉设备
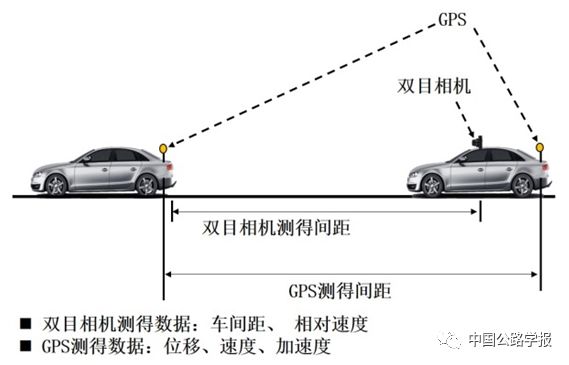 图2 试验场景 本文的试验场景如图2所示。两台差分GPS接收机(定位精度均为2cm)分别固定在前车和跟驰车的尾部。如图3所示,后车GPS定位数据与双目测量数据组合用于跟驰状态实时感知;前车GPS轨迹数据与后车GPS轨迹数据相结合,一方面用于前期对跟
图2 试验场景 本文的试验场景如图2所示。两台差分GPS接收机(定位精度均为2cm)分别固定在前车和跟驰车的尾部。如图3所示,后车GPS定位数据与双目测量数据组合用于跟驰状态实时感知;前车GPS轨迹数据与后车GPS轨迹数据相结合,一方面用于前期对跟
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章
















 1562
1562











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









