






前言:
欢迎来到《CAN通讯系列》的第11篇文章,本系列前面文章CAN总线基础部分跳过了总线出现错误的情况,本文主要从总线信号错误,总线错误状态和总线网络状态3个方面来介绍。 1. 帧结构1.1 错误帧
错误帧用于在接收和发送消息时检测出错误通知错误的帧,它由错误标志和错误界定符构成。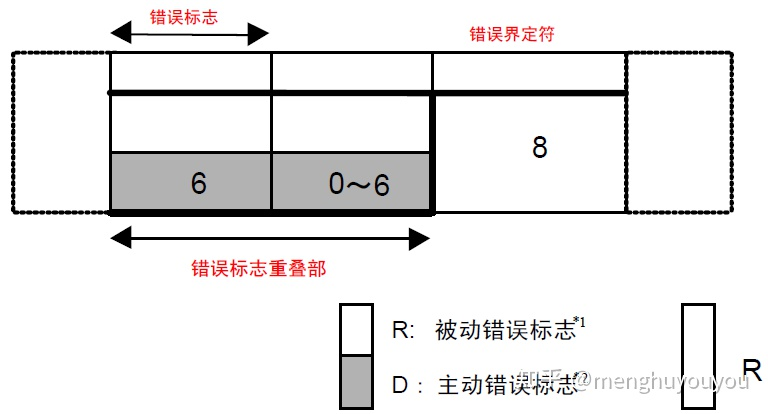
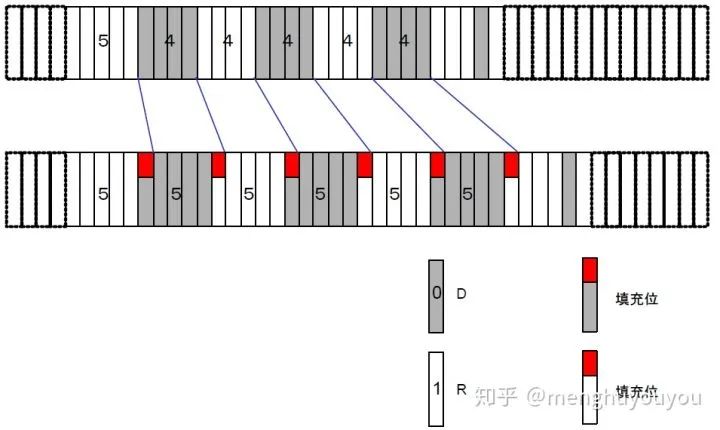
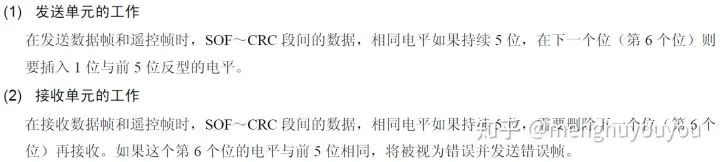 注意:位填充作用范围为SOF-CRC段机间的数据。
2) 错误类型
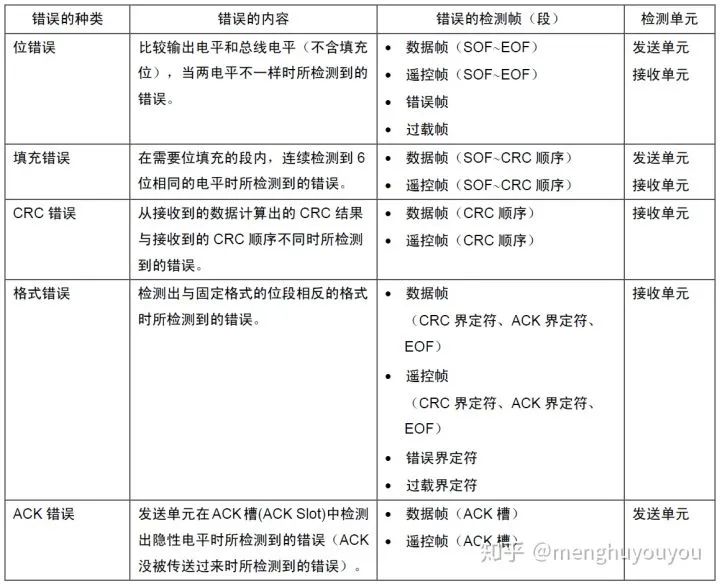
错误类型有5种,如下图3所述。图4为CRC错误示意。
注意:位填充作用范围为SOF-CRC段机间的数据。
2) 错误类型
错误类型有5种,如下图3所述。图4为CRC错误示意。
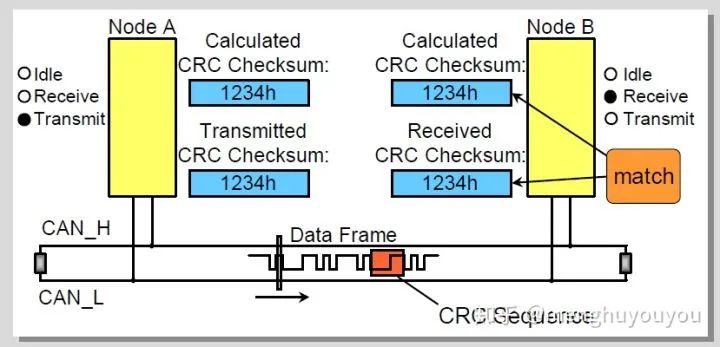

- 位错误、填充错误、格式错误、ACK错误。在错误产生的那一位的下一位开始发送错误帧。
- CRC错误。紧随ACK界定符后的位发送错误帧。
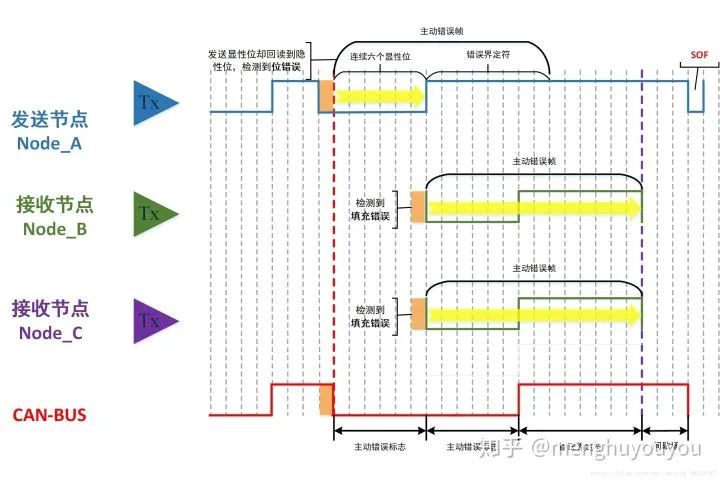
1)发送节点Node_A发送一个显性位,但是却从总线上听到一个隐形位,于是Node_A节点就会检测到一个位错误;
2)Node_A检测到位错误之后,立即在下一位开始发送主动错误帧:6个连续显性位的主动错误标志+8个连续隐性位的错误界定符;
3)对应Node_A发出的主动错误标志,总线上电平为6个连续显性位;
4)接收节点Node_B和Node_C从总线上听到连续6个显性位,那么就会检测到一个填充错误,于是这两个节点都会发送主动错误帧;
5)对应Node_B和Node_C发出的主动错误标志,总线电平又有6个连续显性电平,对应Node_B和Node_C发出的错误界定符,总线电平有8个连续的隐性电平。
6)在间歇场之后,Node_A节点重新发送刚刚出错的报文。
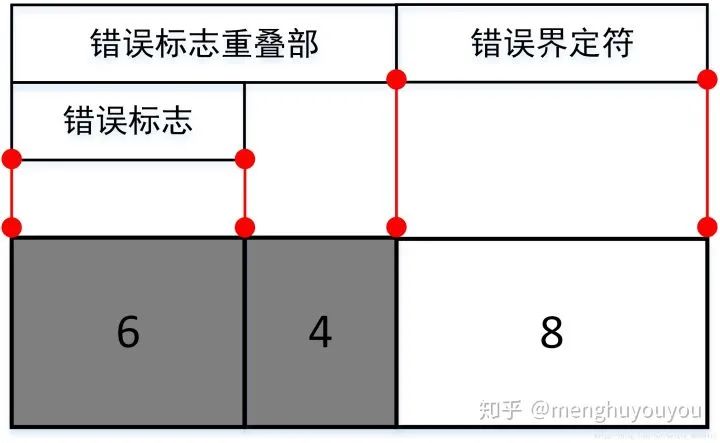
在了解了错误帧的发送后,最后回到之前提到错误标志重叠部分是怎样形成的,看下例(引自[3])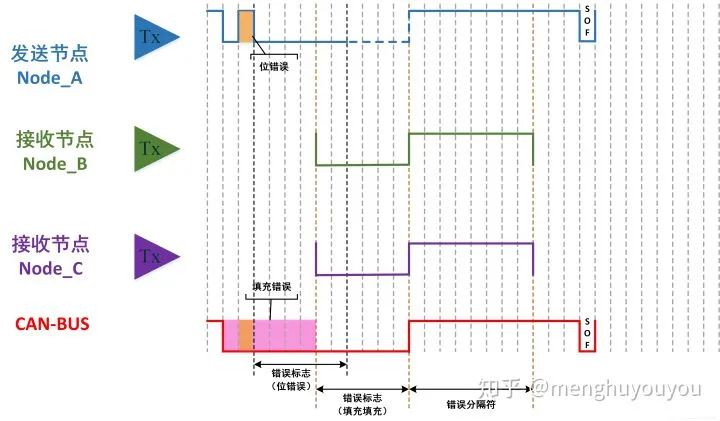
1.2 过载帧
为了后续介绍错误状态,这里再介绍下过载帧,它是用于接收单元通知其尚未完成接收准备的帧。过载帧由过载标志(6个位的显性位)和过载界定符(8个位的隐性位)构成。过载界定符的构成与错误界定符的构成相同。过载帧的构成如下图所示。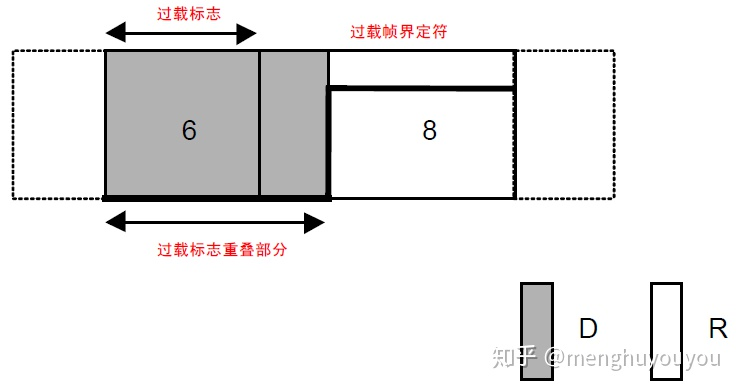
接收节点自身原因。接收节点由于某种原因需要延迟接收下一个数据帧或者遥控帧。
在帧间隔的间歇段的第一位和第二位检测到一个显性位(正常的间歇段都是隐性位)。帧间隔的间隔段本应是三个连续的隐性位,如果接收节点在间隔段检测到显性位,那么就意味着此时有报文发向接收节点,但这个时候是不应该有报文发来的,于是接收节点发送过载帧。
CAN节点在错误界定符或过载界定符的第八位(最后一位)听到一个显性位0,节点会发送一个过载帧,且错误计数器不会增加。接收节点在错误界定符和过载界定符的最后一位听到显性位,也意味着有报文发向接收节点,但这个时候是不应该有报文发来的,于是接收节点发送过载帧。
2. 错误状态
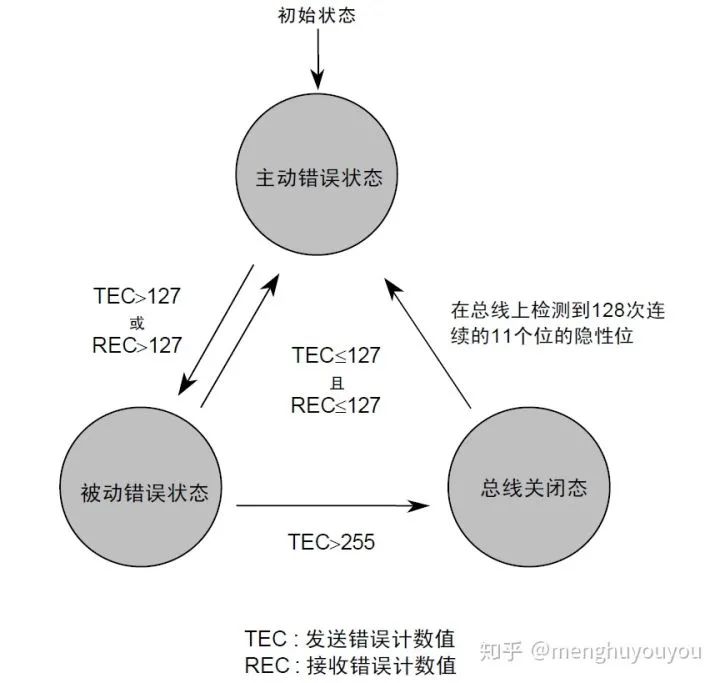
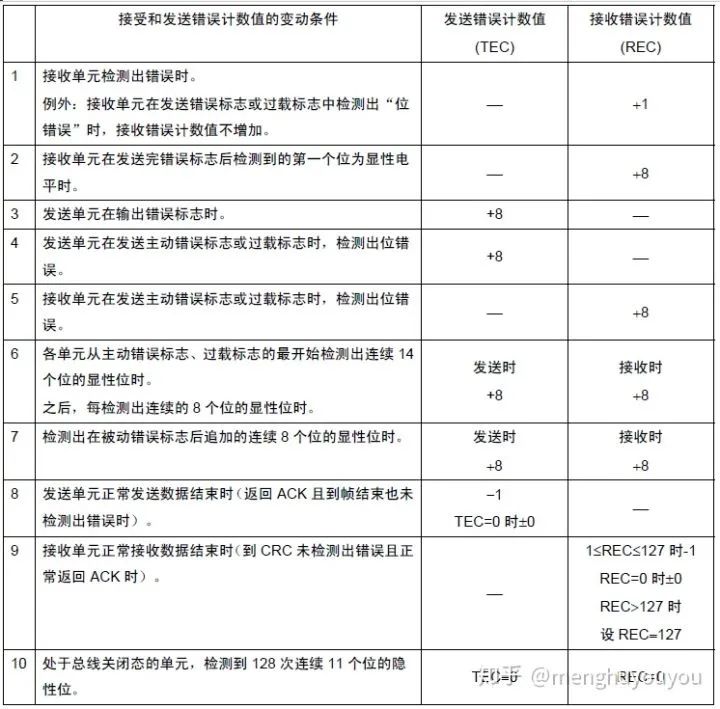
单元(节点)检测到错误帧时,随着错误的积累,单元会处于3种错误状态的一种,即主动错误状态,被动错误状态或总线关闭态。 1)主动错误状态:可以正常参加总线通信的状态,处于主动错误状态的单元检测出错误时,输出主动错误标志。 2)被动错误状态:是易引起错误的状态。处于被动错误状态的单元虽能参加总线通信,但为不妨碍其他单元通信,接收时不能积极地发送错误通知;处于被动错误状态的单元即使检测出错误,而其它处于主动错误状态的单元如果没发现错误,整个总线也被认为是没有错误的。处于被动错误状态的单元检测出错误时,输出被动错误标志。另外,处于被动错误状态的单元不能马上再次开始发送。在开始下次发送前,在间隔帧期间内必须插入“延迟传送”(8个位的隐性位)。 3)总线关闭态是不能参加总线上通信的状态。信息的接收和发送均被禁止。 单元到底会处于以上3种错误状态的哪一种,具体依靠发送错误计算和接收错误计数来管理,根据计数值决定进入何种状态。错误状态和计数值的关系如下表1和图8所示。
3. 网络模式
根据AUTOSAR的CAN状态管理模块的文档可知,CAN状态管理模块内部有3种网络模式,分别是无通讯模式(COMM_NO_COMMUNICATION),静默模式(COMM_SILENT_COMMUNICATION)和完全通讯模式(COMM_FULL_COMMUNICATION),它们之间切换关系如下图10所示。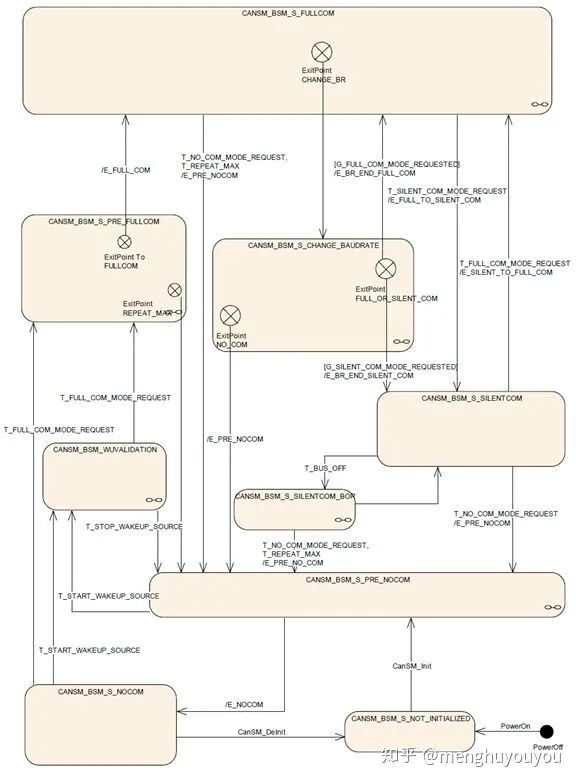
Reference:
[1] CAN入门书.pdf
[2] CANPES.pdf
[3] https://blog.csdn.net/weixin_40528417/category_7489864.html
[4] TC27x D-Step 32-Bit Single-Chip Microcontroller
[5] Specification of CAN State Manager
 —
END—
—
END—


技术交流群:YasmineMiao(微信)
投稿合作:18918250345(微信)














 6850
6850











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









