







简单的理解思路:(世界坐标系固定到左目)
空间中一点P,在左目像素坐标(u1,v1),转成mm为单位的坐标(x1,y1),在左目坐标系下建立过(x,y)的直线lineL;
同样的思路,空间中同一点P,在右目坐标系下建立,过(x2,y2)的直线lineR,LineR上的点要经过(R,T)变换到左目坐标系下;
求直线lineL与lineR的交点 就是P的坐标。
摄像机矩阵由内参矩阵和外参矩阵组成,对摄像机矩阵进行QR分解可以得到内参矩阵和外参矩阵。
内参包括焦距、主点、倾斜系数、畸变系数
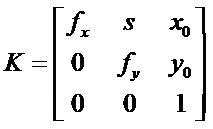 (1)
(1)
其中,fx,fy为焦距,一般情况下,二者相等,x0、y0为主点坐标(相对于成像平面),s为坐标轴倾斜参数,理想情况下为0
外参包括旋转矩阵R3×3、平移向量T3×1,它们共同描述了如何把点从世界坐标系转换到摄像机坐标系,旋转矩阵描述了世界坐标系的坐标轴相对于摄像机坐标轴的方向,平移向量描述了在摄像机坐标系下空间原点的位置。
标定双目后,首先要根据其畸变系数来校正原图,可以参考
http://blog.csdn.net/qq_15947787/article/details/51471535
有矫正的代码::&#
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章
















 1万+
1万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









