






定义:slam中的三角测量指通过不同位置观测一个三维空间中特征点的夹角,从而测得点的深度值;同理亦可通过三角化恢复二维特征点的三维坐标,单目情况下由于平移t尺度的不确定性只能恢复相对三维坐标。
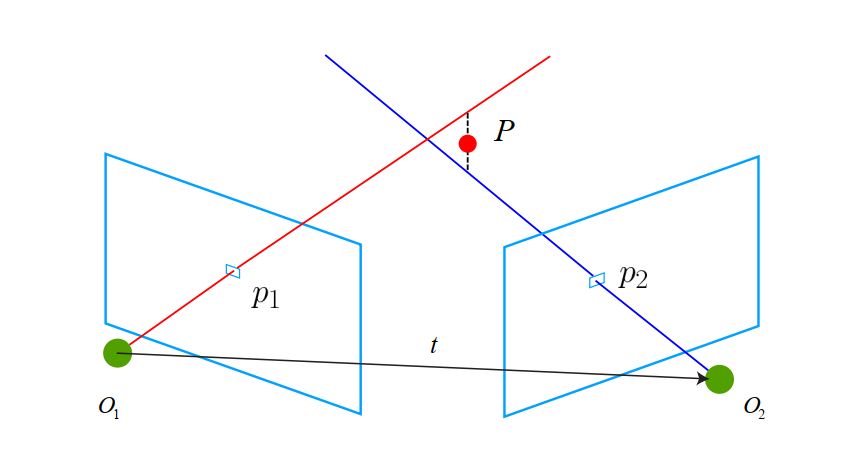
考虑图像 I1 和 I2,以左图为参考,右图的变换矩阵为 T。相机光心为 O1 和 O2。在 I1 中有特征点 p1,对应 I2 中有特征点 p2。理论上直线 O1p1 与 O2p2 在场景中会相交于一点 P,该点即是两个特征点所对应的地图点在三维场景中的位置。
然而由于噪声的影响,这两条直线往往无法相交 因此,也可以通过最二小乘去求解。
方法:
目标:在此使用DLT恢复$p_1$ ,$p_2$ 对应的三维坐标 X;
已知:相机内参K ,外参$T_1$,$T_2$ 三维点P对应的图像点$p_1$ ,$p_2$像素坐标$x_1=\begin{pmatrix}u_1\\v_1\\1\end{pmatrix}$ ,$x_2=\begin{pmatrix}u_2\\v_2\\1\end{pmatrix}$;
相机矩阵 $P=KT$ 其中 $K 3 \times3$ , $T=[R|t] 3\times4$ ;
像素坐标 $x_1=KT_1X=P_1X$;
$x_2=KT_2X=P_2X$;
通过叉乘消去纯量因子,使每个图像点得到三个方程,其中两个是线性独立的,对于第一幅图像有;
$x_1^{\wedge}x_1=x_1^{\wedge}PX=0$
其中 $x_1^{\wedge}=\begin{pmatrix}0&-1&v_1\\1&0&-u_1\\-v_1&u_1&0\end{pmatrix}$
展开得
$u_1\left(P^3_1X\right)-\left(P^1_1X\right)=0$
$v_1\left(P^3_1X\right)-\left(P^2_1X\right)=0$
$u_1\left(P^2_1X\right)-v_1\left(P^1_1X\right)=0$
其中$P^1$ 是P的行,这些关于X的分量是线性的;
同理对于第二幅图像也可以得到三个方程;
各取两个方程得到四个齐次未知量为四的方程,组成$AX=0$的方程;
$A=\left(\begin{array}{cc}{u_{1} P_{1}^{3}} & {-P_{1}^{1}} \\ {v_{1} P_{1}^{3}} & {-P_{1}^{2}} \\ {u_{2} P_{2}^{3}} & {-P_{2}^{1}} \\ {v_{2} P_{2}^{3}} & {-P_{2}^{2}}\end{array}\right)$
通过SVD解 $AX=0$ 得到X
代码
1 ** 2 * @brief 给定投影矩阵P1,P2和图像上的点kp1,kp2,从而恢复3D坐标 3 * 4 * @param kp1 特征点, in reference frame 5 * @param kp2 特征点, in current frame 6 * @param P1 投影矩阵P1 7 * @param P2 投影矩阵P2 8 * @param x3D 三维点 9 * @see Multiple View Geometry in Computer Vision - 12.2 Linear triangulation methods p312 chinese 218 10 */ 11 void Initializer::Triangulate(const cv::KeyPoint &kp1, const cv::KeyPoint &kp2, const cv::Mat &P1, const cv::Mat &P2, cv::Mat &x3D) 12 { 13 // 在DecomposeE函数和ReconstructH函数中对t有归一化 14 // 这里三角化过程中恢复的3D点深度取决于 t 的尺度, 15 // 但是这里恢复的3D点并没有决定单目整个SLAM过程的尺度 16 // 因为CreateInitialMapMonocular函数对3D点深度会缩放,然后反过来对 t 有改变 17 18 cv::Mat A(4,4,CV_32F); 19 20 A.row(0) = kp1.pt.x*P1.row(2)-P1.row(0); 21 A.row(1) = kp1.pt.y*P1.row(2)-P1.row(1); 22 A.row(2) = kp2.pt.x*P2.row(2)-P2.row(0); 23 A.row(3) = kp2.pt.y*P2.row(2)-P2.row(1); 24 25 //Ax=0 26 cv::Mat u,w,vt; 27 cv::SVD::compute(A,w,u,vt,cv::SVD::MODIFY_A| cv::SVD::FULL_UV); 28 x3D = vt.row(3).t();//竖排 29 x3D = x3D.rowRange(0,3)/x3D.at<float>(3);//齐次 尺度变换成1 30 }















 5936
5936











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









