






C programming语言用于为e-puck2机器人的主微控制器开发代码。选择将ChibiOS嵌入式实时操作系统集成到固件中,因为它支持STM32F4系列微处理器,它包括一个HAL(硬件抽象层),它有很好的文档记录,它是免费的。
在开始编码之前,您需要安装开发环境及其依赖项,然后记录所有步骤。
工厂固件集成了用于处理所有传感器和执行器的e-puck2库以及使用该库的一系列演示。因此,您可以采用工厂固件并直接修改其主要部分,否则您可以通过将工厂固件项目链接为外部库来启动一个全新的项目。
安装e-puck2环境
Eclipse_e-puck2是针对C / C ++开发人员的Eclipse IDE发行版,经过特别修改,可以直接编辑和编译e-puck2的项目。它不需要安装,所需的一切都位于给定的包装中。能够运行Eclipse所需的唯一依赖是Java。
适用于Windows的安装
Java 8 32位如果您的计算机上已安装Java版本> = 8 32位,则可以忽略此部分。
要验证你已经安装了Java,您可以打开这台电脑-->属性-->控制面板主页--->查看是否有java(32位)选项。如果此条目不存在,则需要安装它:
转到Java下载页面并下载Windows offline pacakge。这是Java的32位版本。运行下载的安装程序并按照其说明继续安装Java 32bits。如果在安装结束时打开了Internet浏览器,将其关闭就可以了。
Eclipse_e-puck2
下载适用于Windows的Eclipse_e-puck2包。
将下载的文件解压缩到您想要的位置(可能需要一些时间)。强烈建议使用7Zip以获得更好的性能和更少的提取时间。您可以在http://www.7-zip.org上下载。
您现在可以运行Eclipse_e-puck2.exe以启动Eclipse。
您可以根据需要创建快捷方式Eclipse_e-puck2.exe并将其放置在你想放置的目录位置。注意:不要放置在有中文目录下。
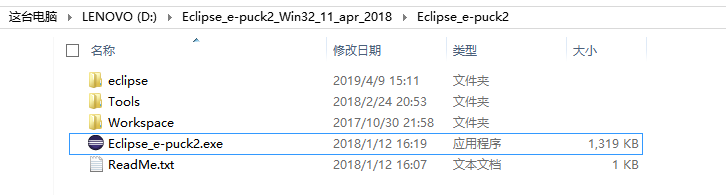
提取后获得Eclipse_e-puck2文件夹
要避免的重要事项:
1. Eclipse_e-puck2文件夹的路径必须包含零空格。
示例:
C:\epfl_stuff\Eclipse_e-puck2 正确
C:\epfl stuff\Eclipse_e-puck2 不正确
2.你不能把Eclipse_e-puck2文件夹放进去Program Files (x86)。否则,使用Eclipse时的编译将无法正常工作。
3.文件Eclipse_e-puck2夹中的文件结构必须保持不变。这意味着此文件夹中的文件不得移动到其他位置。
配置PATH变量:
该PATH变量是一个环境变量,用于存储包含可执行文件的文件夹的路径列表,然后我们可以从任何路径在终端中运行这些文件。
如果要使用包中arm-none-eabi提供的工具链Eclipse_e-puck2,则必须将其添加到PATH变量中才能在终端窗口内调用它。如果要PATH永久设置变量,请转到右键我的电脑=> 属性=> 系统=>高级系统设置=> 环境变量(N..)。显示为用户定义的变量列表,双击PATH变量(从用户变量列表中)并在末尾添加;your_installation_path\Eclipse_e-puck2\Tools\gcc-arm-none-eabi-7-2017-q4-major-win32\bin,然后单击“确定”三次。
注意:arm-none-eabi版本可能与此示例中给出的版本不同。可能需要使路径适应正确的版本
获取源代码
e-puck2的代码是开源的,可以作为git存储库使用。
要下载源代码,需要在系统上安装git:
- Windows:来自https://gitforwindows.org/的 downlaod git 并按照安装说明进行操作(默认配置正常)
- Linux:发出命令 sudo apt-get install git
- Mac:发出命令 brew install git
可以使用以下命令下载源代码:
该命令必须在Windows上或Linux / Mac上的终端中发出。
git clone --recursive https://github.com/e-puck2/e-puck2_main-processor.git该存储库包含主微控制器工厂固件和e-puck2库。该库包含与机器人传感器和执行器交互所需的所有功能; 工厂固件显示如何使用这些功能。
可以从e-puck2_main-processor_snapshot_16.02.18.zip下载存储库的快照。
创建一个项目
主芯片出厂固件默认项目
如果要修改在主微控制器上运行的工厂固件的代码,或者如果要查看实现详细信息,则可以按照以下步骤在Eclipse中添加此项目:
1.运行Eclipse然后选择File->New->Makefile Project with Existing Code。
2.接下来单击Browse按钮并选择之前下载的git存储库的项目文件夹(e-puck2_main-processor)并设置项目名称(否则您可以保留Eclipse创建的项目名称)。选择None工具链。
3.单击Finish按钮,项目将添加到Eclipse。
4.通过从左侧面板中选择项目的一个目录然后构建项目Project->Build Project。
创建项目模板
主微控制器工厂固件项目也可以用作库来构建您自己的项目。
要实现这一点,您必须复制项目中Project_template包含的文件夹,e-puck2_main-processor并将其放在e-puck2_main-processor项目的同一目录中; 您当然可以将文件夹重命名为您想要的名称(例如myproject)。您必须最终得到以下目录树:
E-puck2
e-puck2_main-processor
myproject
然后,您可以按照以下步骤在Eclipse中添加此项目:
运行Eclipse然后选择File->New->Makefile Project with Existing Code。
接下来单击Browse按钮并选择项目的项目文件夹(例如myproject)并设置项目名称(否则您可以保留Eclipse创建的项目名称)。选择None工具链。
单击Finish按钮,项目将添加到Eclipse。
选择项目根文件夹,然后转到 Project->Properties->C/C++ General->Preprocessor Include Paths, Macros etc->Providers并选中CDT Cross GCC Built-in Compiler Settings。
然后在下面的文本框中写arm-none-eabi-gcc ${FLAGS} -E -P -v -dD "${INPUTS}"。
在项目中创建链接到e-puck2_main-processor库的链接文件夹。这允许Eclipse索引库代码中函数和变量的声明和实现。
选择项目根文件夹,然后转到File->New->Folder。
检查Advanced >>底部。
选择Link to alternate location (Linked Folder)。
输入PROJECT_LOC/../e-puck2_main-processor并单击Finish按钮。
通过从左侧面板中选择项目的一个文件来构建项目,然后Project->Build Project。编译结果将显示在build项目文件夹的文件夹中。
编译项目后,选择项目根文件夹并转到Project->C/C++ Index->Rebuild重建索引(我们需要编译至少一次,以便让Eclipse找到所用文件的所有路径)。
现在你可以编写自己的程序了。如果要将源文件(.c)添加到项目中,则还需要makefile在CSRC定义中添加它们。.h位于其旁边的所有头文件()makefile都自动包含在编译中,但如果需要将它们放入文件夹中,则必须makefile在INCDIR定义中的这些文件夹中指定这些文件夹。.h来自其他外部文件夹的任何所需文件都需要相同的内容。您还可以
在其中makefile设置项目的名称。
这makefile使用e-puck2_main-processor项目的主makefile 。这意味着您可以添加自定义命令,makefile但不应干扰主makefile。















 1409
1409











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









