






一、电动机接线
一般常用三相交流电动机接线架上都引出6个接线柱,当电动机铭牌上标为Y形接法时,D6、D4、D5相连接,D1~D3接电源;为△形接法时,D6与D1连接,D4与D2连接,D5与D3连接,然后D1~D3接电源。可参见图1所示连接方法连接。
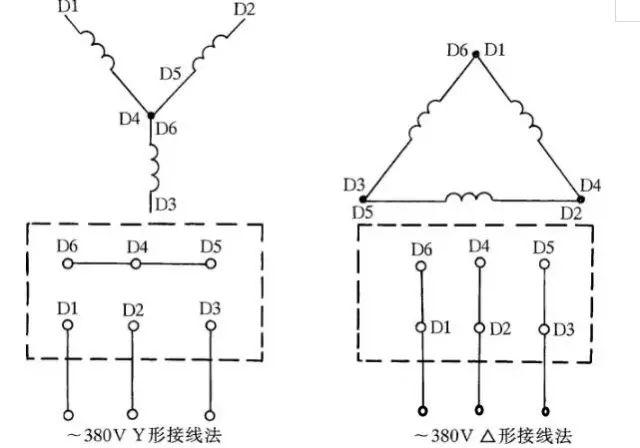
图 三相交流电动机Y形和△形接线方法
二、三相吹风机接线
有部分三相吹风机有6个接线端子,接线方法如图2所示。采用△形接法应接入220V三相交流电源,采用Y形接法应接入380V三相交流电源。一般3英寸、3.5英寸、4英寸、4.5英寸的型号按此法接。其他吹风机应按其铭牌上所标的接法连接。
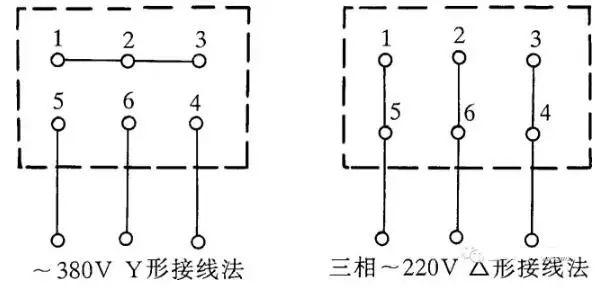
图 三相吹风机六个引出端子接线方法
三、单相电容运转电动机接线
单相电动机接线方法很多,如果不按要求接线,就会有烧坏电动机的可能。因此在接线时,一定要看清铭牌上注明的接线方法。
图247为IDD5032型单相电容运转电动机接线方法。其功率为60W,电容选用耐压500V、容量为4μF的产品。图3(a)为正转接线,图3(b)为反转接线。
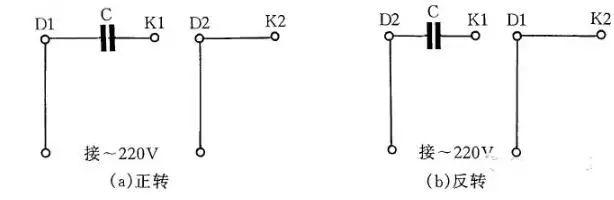
图 IDD5032型单相电容运转电动机接线方法
四、单相电容运转电动机接线
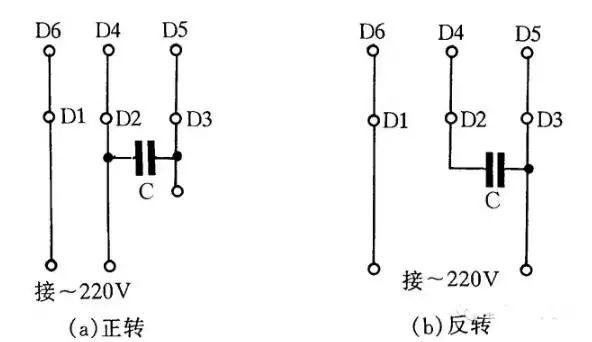
图 JX07A-4型单相电容运转电动机接线方法
图4是JX07A-4型单相电容运转电动机接线方法。电动机功率为60W,用220V/50Hz交流电源、电流为0.5A。它的转速为每分钟1400转。电容选用耐压400~500V、容量8μF的产品。图4(a)为正转接线,图4(b)为反转接线。
五、单相吹风机接线
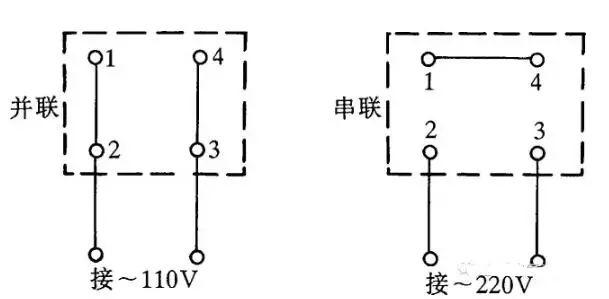
图 单相吹风机四个引出端子接线方法
有的单相吹风机引出4个接线端子,接线方法如图5所示。采用并联接法应接入110V交流电源,采用串联接法应接入220V交流电源。
六、Y100LY系列电动机接线
目前,Y系列电动机被广泛应用。Y系列电动机具有体积小、外形美观、节电等优点。它的接线方式有两种:一种为△形,它的接线端子W2与U1相连,U2与V1相连,V2与W1相连,然后接电源;另一种为Y形,接线端子W2、U2、V2相连接,其余3个接线端子U1、V1、W1接电源。接线见图6。
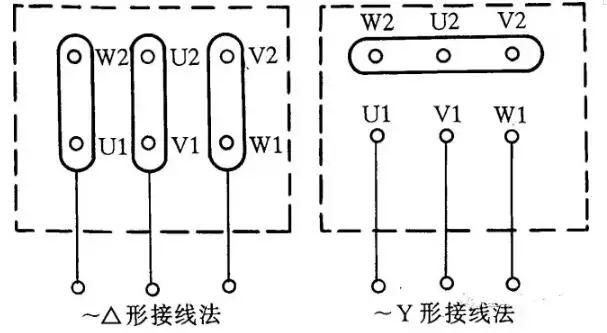
图 Y100LY系列电动机接线方法
七、低压变压器短路保护线路
目前,机床的工作灯、行灯都采用低压变压器提供36V安全电压,由于灯具在使用中经常移动,极易发生短路故障,造成熔断器熔断甚至烧坏变压器。如果使用36V小型中间继电器或36V交流接触器做变压器的通断开关,可避免烧坏变压器。线路如图7所示。
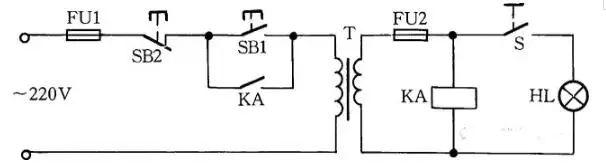
图 低压变压器短路保护线路
工作原理:闭合S后,按下按钮SB1,变压器得电输出36V低电压,使得继电器或交流接触器KA吸合。放松按钮SB1后,KA自锁触点使KA保持吸合,继续给变压器接通电源。如果变压器次级发生短路故障,继电器线圈电压为零,此时KA便失电释放,将变压器电源断开,保护变压器不被破坏。
八、速电动机2Y/2Y接线方法
图8所示是2Y/2Y电动机双速定子线组的引出线接线方法。按图8(a)连接是一种转速,按图8(b)连接得到另一种转速。
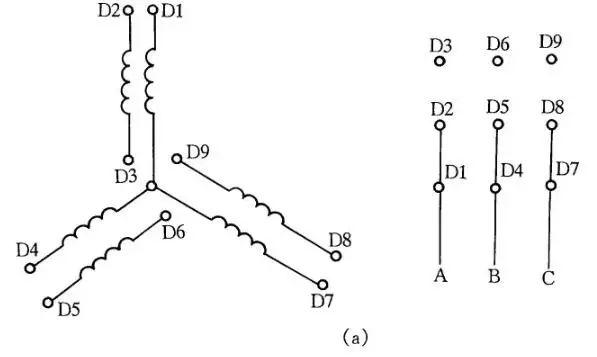
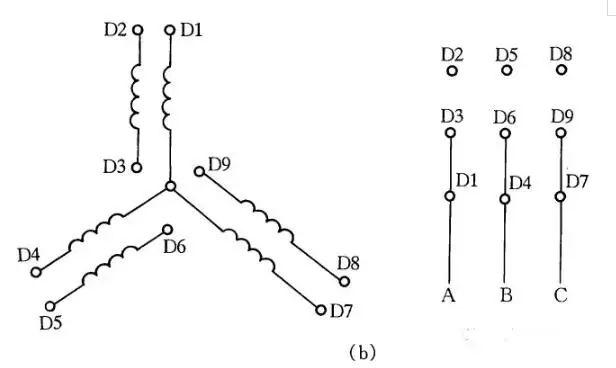
图 双速电动机2Y/2Y接线方法
九、直流电磁铁快速退磁线路
直流电磁铁停电后,因有剩磁存在,有时会造成不良后果。因此,必须设法消除剩磁。图9中,YA是直流电磁铁线圈,KM是控制YA启停的接触器。KM吸合时,YA通电励磁;KM复位时,YA断直流电,并进行快速退磁。
快速退磁的工作原理是:直流电磁铁断电后,交流电源通过桥式整流器和YA向电容C充电,随着电容C两端电压的不断升高,充电电流越来越小,而通过YA的电流又是交变的,从而使电磁铁快速退磁。电容C的容量要根据电磁铁的实际情况现场试验决定。R为放电电阻。
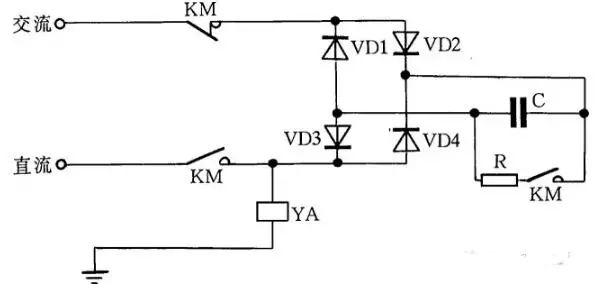
图 直流电磁铁快速退磁线路
十、缺辅助触点的交流接触器应急接线
当交流接触器的辅助触点损坏无法修复而又急需使用时,采用图12中所示的接线方法,可满足应急使用要求。按下SB1,交流接触器KM吸合。放松按钮SB1后,KM的触点兼作自锁触点,使接触器自锁,因此KM仍保持吸合。
图中SB2为停止按钮,在停止时,按动SB2的时间要长一点。否则,手松开按钮后,接触器又吸合,使电动机继续运行。这是因为电源电压虽被切断,但由于惯性的作用,电动机转子仍然转动,其定子绕组会产生感应电动势,一旦停止按钮很快复位,感应电动势直接加在接触器线圈上,使其再次吸合,电动机继续运转。接触器线圈电压为380V时,可按图12(a)所示接线;接触器线圈电压为220V时,可按图12(b)接线。图12(a)的接线还有缺陷,即在电动机停转时,其引出线及电动机带电,使维修不大安全。因此,这种线路只能在应急时采用,并在维修电动机时,应断开控制电动机的总电源开关QS,这一点应特别注意。
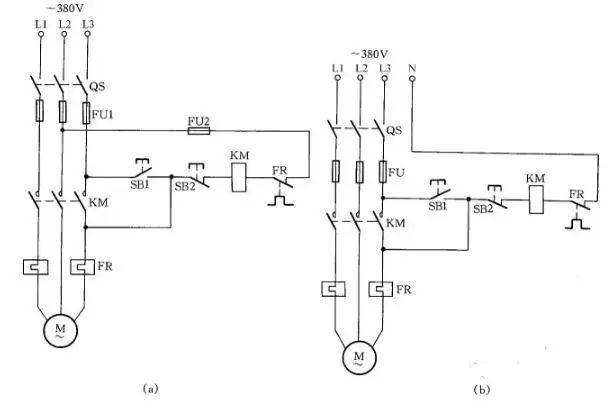
图 缺辅助触点的交流接触器应急接线
十一、单相电容电动机线路
单相电容电动机启动转矩大,启动电流小,功率因数高,广泛应用于家用电器中,如电风扇、洗衣机。为了便于维修安装,现介绍这种电动机常用的接线方法。
图16(a)为可逆控制线路,操纵开关S2,可改变电动机的转向,该线路一般用于家用洗衣机上。
图16(b)为带辅助绕组的接线线路,拨动开关S,可改变辅助绕组的抽头,即改变主绕组的实际承受电压,从而改变电动机的转速,此接线方法常用于电风扇上。
图16(c)为带电抗器调速的电容电动机接线线路。由于电抗器绕组(其在线路中起到降压作用)的串入,调节电抗器绕组的串入量,即可改变转速。这种方法目前广泛应用在家用电风扇线路中。在启动电动机时一般先拨到“1”挡上,即为高挡,这时电抗器不接入线路,使电动机在全压下启动,然后再拨“2”挡或任何挡来调节电动机转速。
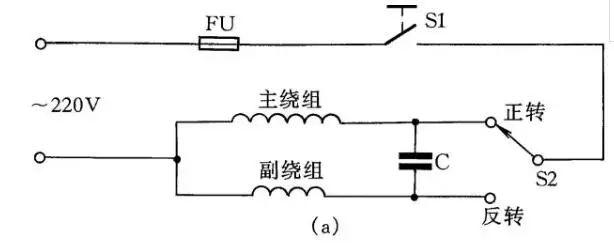
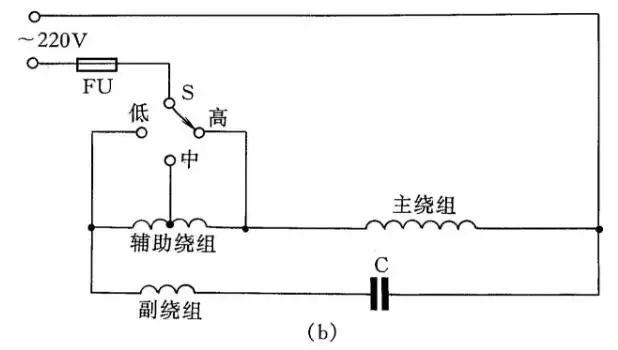
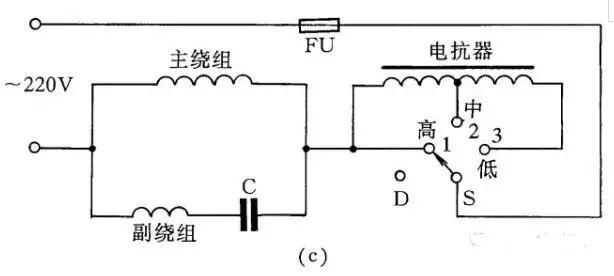
图 单相电容电动机线路
十二、三相异步电动机改为单相运行线路
如果只有单相电源和三相异步电动机供使用,可采用并联电容的方法使三相异步电动机改为单相运行。
如图19所示:图(a)为Y形接法电动机连接方法,图(b)为△形接法电动机连接方法。为了提高启动转矩,将启动电容CQ在启动时接入线路中,在启动完毕后退出。
工作电容CG容量的计算公式:
CG=1950I/Ucosφ(μF)
式中:I为电动机额定电流;U为单相电源电压;cosφ为电动机的功率因数。当计算出工作电容后,启动电容选用工作电容的1~4倍。
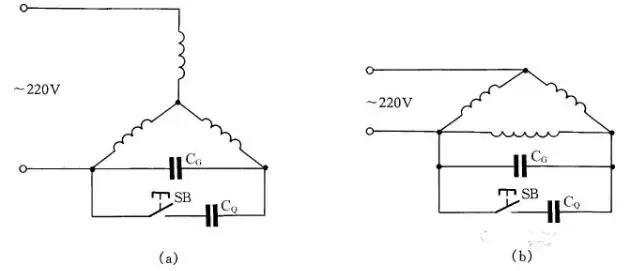
图 三相异步电动机改为单相运行线路

















 3550
3550

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









