







预先安装软件:Autoware 1.12/1.13(Ubuntu上,这里使用1.12版本)
联合仿真简要机制示意图:
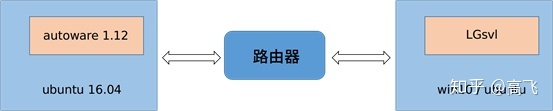
LGsvl与Autoware启动之后通过无线网络或者网线进行连接,其中autoware运行在ubuntu16.04中,官方推荐LGsvl是在win10中运行的。连接完成后,在两个软件内进行必要的设置后,LGsvl就会通过网络以topic消息的形式向Autoware发送激光雷达的模拟数据。使用这种数据传输机制,就是说可以允许使用两台电脑,也可以使用同一台电脑(未测试),如果电脑性能有限,建议使用两台电脑进行联合仿真。(LGsvl虽然对显卡要求不高,但是占用资源也很大。Autoware进行ndt建图的时候需要大量的计算。)
ps:LGsvl与Autoware为分立的两个软件,autoware中提供有LGsvl的数据接口,无需要装bridge。运行LGsvl和autoware可以使用同一台电脑,只需要在后续步骤中使用相同的IP地址即可。
一、Autoware内LGsvl Simulator配置:
首先autoware内是LGsvl Simulator的接口按钮,在autoware的simulation栏的左下角:
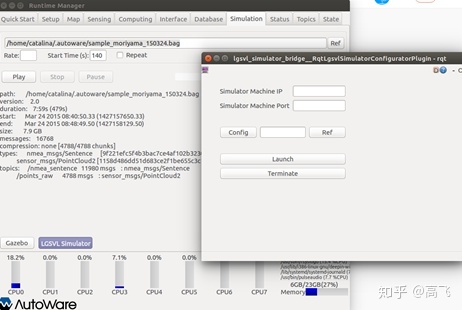
因为1.12 版本中 编译系统采用了 colcon,编译之后 package 路径会定位到新路径下,但是软件内好像没有做相应的修改,而一些必要的文件会在下载源码编译的时候存放在旧的路径中,运行的时候软件会定位到新的路径下,所以会出错。如果直接点击这个按钮会在终端出现如下错误:
[rosrun] Couldn't find executable named rqt_lgsvl_simulator_configurator below /home/autoware/Autoware/ros/install/lgsvl_simulator_bridge/share/lgsvl_simulator_bridge
文件手动配置方法如下:
旧路径为:~/autoware.ai/src/autoware/simulation/lgsvl_simulator_bridge
新路径为:~/autoware.ai/install/lgsvl_simulator_bridge/share/lgsvl_simulator_bridge 文件配置方式如下:
1. 旧路径下的整个 resource 文件夹拷贝到新路径下
2. 旧路径下的 plugin.xml 文件拷贝到新路径下
3. 旧路径下的整个 scripts 文件夹拷贝到新路径下
4. 旧路径下的 src/lgsvl_simulator_bridge 文件夹中的 configurator.py 拷贝到新路径的 scripts 文件夹中
完成后新路径内文件结构为:
├── cmake
│ ├── lgsvl_simulator_bridgeConfig.cmake
│ └── lgsvl_simulator_bridgeConfig-version.cmake
├── config
│ ├── sample.json
│ └── setting.dat
├── hook
│ ├── cmake_prefix_path.ps1
│ ├── cmake_prefix_path.sh
│ ├── pkg_config.ps1
│ ├── pkg_config.sh
│ ├── python2path.ps1
│ ├── python2path.sh
│ ├── ros_package_path.ps1
│ └── ros_package_path.sh
├── launch
│ ├── bridge.launch
│ └── lgsvl_simulator.launch
├── media
│ ├── autoware.png
│ └── lgsvl_simulator_bridge.png
├── package.bash
├── package.ps1
├── package.sh
├── package.xml
├── package.zsh
├── plugin.xml
├── resource
│ └── LgsvlSimulatorConfigratorPlugin.ui
├── rviz
│ └── lgsvl_simulator.rviz
└── scripts
├── configurator.py
├── launch_sim.bash
└── rqt_lgsvl_simulator_configurator
此时autoware内的LGsvl Simulator应该是能正常启动了。
二、Win10下载LGsvl Simulator
当然,可以使用Ubuntu版本,官网推荐使用win版本,更加方便。
Win10中的LGsvl Simulator是免安装的,直接下载文件解压后就能使用了,
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章
















 1万+
1万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









