






 本文探讨了历史文物建筑保护的重要性,尤其是借助现代技术如三维激光扫描和BIM(建筑信息模型)技术。通过点云数据,可以高效、精确地获取古建筑的复杂信息,避免对建筑本身的损害。BIM技术能整合建筑信息,提供三维模型,便于古建筑的重建和仿制。目前,点云扫描和近景摄影测量是主要的古建筑测绘方法,而BIM建模包括数据采集、处理和三维模型创建三个步骤。
本文探讨了历史文物建筑保护的重要性,尤其是借助现代技术如三维激光扫描和BIM(建筑信息模型)技术。通过点云数据,可以高效、精确地获取古建筑的复杂信息,避免对建筑本身的损害。BIM技术能整合建筑信息,提供三维模型,便于古建筑的重建和仿制。目前,点云扫描和近景摄影测量是主要的古建筑测绘方法,而BIM建模包括数据采集、处理和三维模型创建三个步骤。
Notice
引言
历史文物建筑是前人建造智慧的结晶,也是祖先留给后人的珍贵物质文化遗产。古建筑不可再生,一旦破坏,难以复原。因此对古建筑的保护就显得尤为重要。但是因为自然的侵蚀作用和开发利用等各种人为因素的影响,历史文物正不可避免的遭受不同程度的损坏和破坏。

上图:巴黎圣母院遭遇大火

上图:大火后的巴黎圣母院
上图:巴黎圣母院点云数据模型
因此,文物保护就显得尤其重要,这其中最重要的一项保护就是保存文物的建筑信息。传统测绘方法通常是文物建筑外部搭设脚手架,利用尺子等测量工具来进行建筑细部尺寸的测绘。但历史建筑造型极其复杂,传统方法工程量非常大,并且效率不高且数据精度不高,更重要的是不可避免的会接触到建筑物本身,产生伤害。如何不损坏原有建筑又能够高效精确的提取古建筑的建筑信息成为了当务之急。古建筑的外形华美,形态复杂,建筑结构和建筑材料复杂,比现今建筑要复杂很多,很难用表述有限的二维信息去全面表达。并且由于古建筑大多年代久远,历史档案缺失,使得重建工作困难重重。
近些年来,随着现代测绘科技的快速发展,全球定位系统(GPS)、三维激光点云扫描等三维数字化测量手段为历史文物建筑的高效还原带来了可能。
同时,近些年蓬勃发展的建筑信息模型技术(Building In⁃formation Modeling,缩写为BIM)作为建筑行业的两大新兴技术之一,正处于蓬勃发展阶段。BIM技术的最大价值在于可以在建筑的全生命周期发挥重要作用。BIM技术本质上是三维仿真技术,是对真实建筑的数字化表达,包含了三维几何信息和建筑属性信息。建筑的全生命周期通常是指设计、施工、运维、拆除及后续再利用。广义上说 BIM是建筑各种信息的融合。以古建筑为例,BIM能够准确完备的表达古建筑的现状三维信息,其次BIM技术可以表达不同时间节点下的历史建筑信息,可以用于各种数值分析、受力分析和安全评估。
历史文物建筑的BIM技术应用可以极大的提高文物保护的效率。一方面,通过BIM技术把建筑物各种纷繁复杂的建筑信息整合到一个平台上来;另一方面,BIM的精细化模型为古建筑将来的三维重建与仿制提供了1:1的真实模型。
研究现状及趋势
古建筑保护的关键的、最核心的工作是诸如斗拱、飞檐等复杂建筑构件三维尺寸信息的量取和表达。目前测绘古建筑细部尺寸的技术方法有四种:查阅档案资料、进行复杂繁琐的人工测绘、三维激光扫描和近景摄影测量。
(1)历史档案资料。我国古建筑的历史资料信息缺失严重,由于历史年代久远、战火及其他很多原因,我国很多建筑历史资料早已流失或者遭到损毁破坏,大量历史文物建筑无史料可考,或者残缺不全。
(2)手工测量。通过踏勘寻找建筑形体的关键特征点,绘制草图,并且利用诸如水准仪、全站仪、测尺等常规测量仪器逐点逐线测量出建筑物的大量关键特征点,进而绘制出建筑的各平面图、立面图和剖面图。但手工测量存在“以点概面”的致命缺陷:①仪器设备费用较低,但带来了人工工作量巨大;②数据精度变化大:数据的精度往往受观测者的专业素质影响较大。
(3)三维激光扫描技术。三维激光扫描技术被形象的称为“实景复制技术”,这项技术的使用使历史文物建筑的空间信息获取实现了从单点、低效量测进步到了高效高精度模式,在古建筑保护领域是未来的发展方向。
(4)近景摄影测量技术。近景摄影测量技术同样是非接触式、快速采集数据方法,但其数据通常为栅格影像,提取尺寸较三维激光扫描技术复杂。在实际应用中,通常是与三维激光扫描技术结合起来使用。
BIM建模的技术路线
利用三维激光扫描技术得到的点云数据可以作为建立模型的几何信息。以无锡某寺庙为例。
该寺庙的BIM建模应用主要是采用地面设站式激光点云扫描+手持式激光点云扫描相结合的方法获取建筑物各个细部的点云数据,同时结合仪器内置的彩色相机采集建筑物表面的纹理信息,后期通过点云叠加纹理数据来进行内业数据处理,绘制建筑物和细部节点的平面图、立面图、剖面图等二维矢量图,进而在BIM软件中建立三维数字模型。
主要建模工作分为三个部分。
(1)外业数据的采集。主要工作有扫描的前期准备工作和点云扫描的具体实施。前期准备工作又分为扫描方案的设计、外业踏勘、布设控制点。点云扫描的具体实施又分为扫描前的可行性分析及小范围试作业、点云正式扫描采集两步。
(2)内业数据处理。内业数据处理工作主要含有激光点云的预处理、去噪、拼接、滤波和精简等操作流程,同时要及时检核点云的精度情况。内业数据处理后的成果是可以完整展示现实古建筑的1:1的数字点云成果。
(3)建立三维模型。利用采集的海量点云成果,导入到相关矢量绘图软件中,通过切出相应厚度的点云数据,通过人工判读的方法绘制出古建筑的二维现状图纸,进而导入到BIM建模软件中(以Revit为例)进行精细化三维模型制作。
BIM建模的实施过程
4.1 外业数据的采集
三维点云扫描利用三维激光扫描仪发出的无数激光照射到被测物体的表面,利用被测物体的反射光和来回的时间进而求得扫描仪相对于物体的距离,角度等信息,这些信息被存储在某个特定位置的坐标点上。海量的单点信息就构成了点云。
(1)待测区域踏勘及设计实施方案。在点云采集之前,一般需要到现场进行踏勘,制定出外业工作的行动方案。根据拟测建筑的结构特点、建筑周边环境和位置关系,划定数据采集的作业范围,做出工作计划。该寺庙寺庙周边较空旷,每天上午游客较多,因此扫描选取在下午进行,外业设站情况根据实地踏勘情况,预计可布置9站即可扫描完整。
(2)外业采集点云数据。点云数据采集的方法,目前常用的是:使用标靶球作为定位点来实现多站拼接、无标靶球利用特征点数据自动拼接、结合全站仪GPS等大地测量仪器精确布点。本项目外业点云采集采用标靶球+纸质标靶的方式。
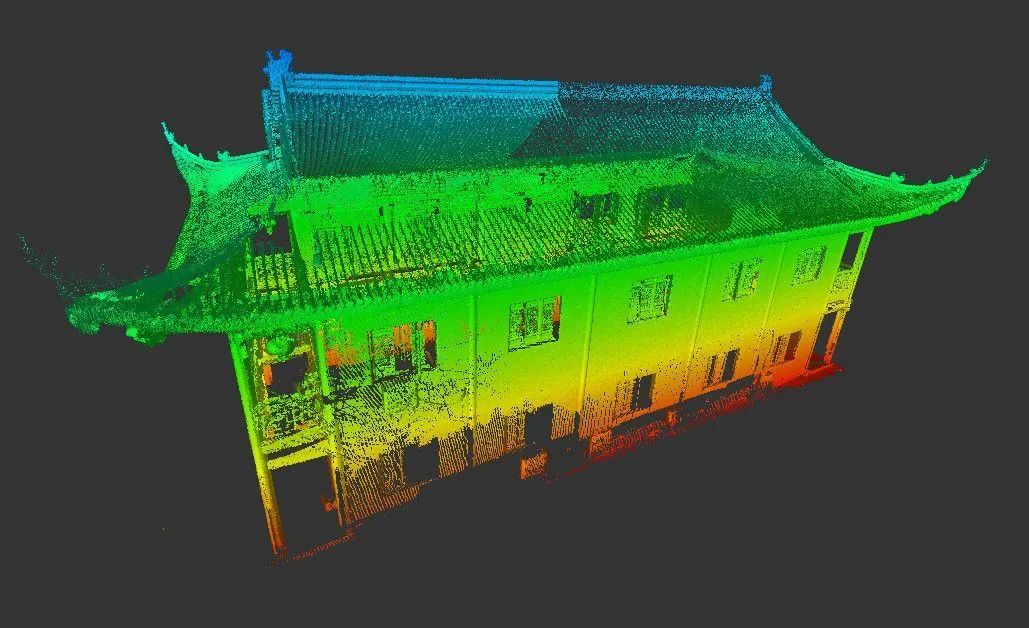
上图:无锡某寺庙点云数据模型
4.2 内业数据的处理
外业采集的多测站点云数据必须经过内业处理和检核才能用于制作生成反应建筑真实尺寸信息的模型。内业数据处理主要由点云数据的拼接、点云数据的去噪、点云数据的剔除和修补等操作组成,经过内业处理过的点云成果才能尽量真实的反映建筑的真实信息。
(1)点云数据的拼接。由于每一个测站都是在不同的位置独立采集得到的基于该位置的点云数据信息。为了完整反映建筑的外部尺寸,必须将所有测站的点云数据统一到同一个坐标系统下,才能反映各个测站区域的正确空间关系。
(2)点云数据的滤波、修补和精简等操作。点云数据在进行采集时,由于所处的环境,不可避免的受到树木、其他建筑物、行人和车辆等的影响,除待测建筑以外的其他物体在测量中均称为噪声。这些数据必须予以剔除。另外对于局部被遮挡的建筑物表面,由于没有点云数据,可以通过相关软件算法修补相关的洞口。同时由于点云的重复点较多,导致数据量庞大。在满足精度要求的前提,可以对重复数据进行抽稀精简。
4.3 成果制作
(1)按构建制作古建筑的二维详图。利用点云数据成果,通过分析模型,选取相关位置,切除相应厚度的点云薄片,导入到相关矢量作图软件中,根据人工判读建筑构件的实际轮廓来制作生成所需构件的立面图、剖面图、等二维线划图。本项目采用将点云数据导出到AUTO⁃CAD中来制作二维矢量图纸,最终成果保存为欧特克的数据交换格式DXF。
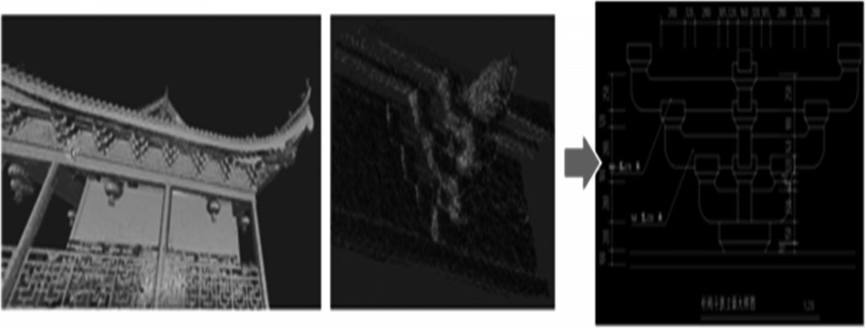
上图:基于点云数据制作斗拱二维图纸
(2)三维模型的制作。利用Revit软件依据矢量图纸将古建筑的各建筑构件制作成族来完成古建筑的逆向建模。下图所示的是以斗拱为例,来完成建筑模型创建的过程。
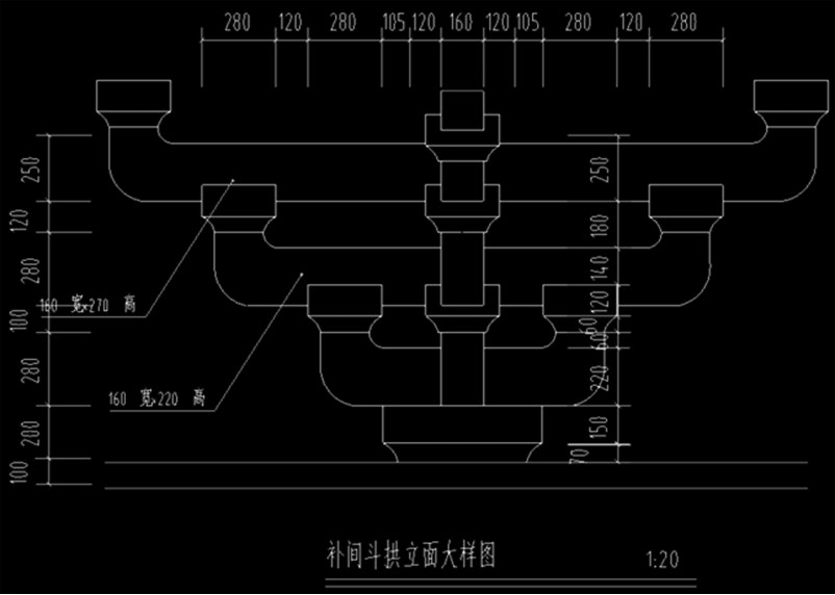
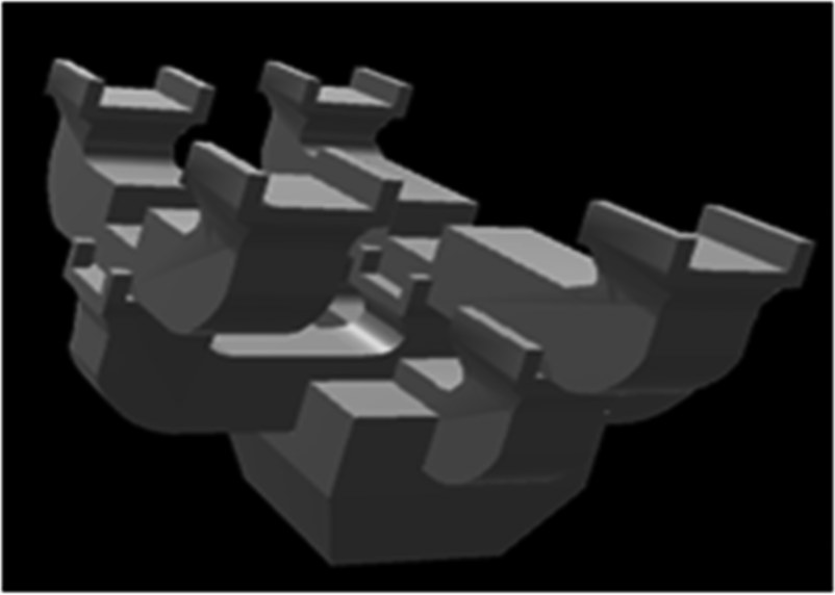
上图:基于图纸制作斗拱BIM模型
本文作者:葛仁华 沈维莉
本文来源:《基于点云的历史文物建筑BIM建模应用》
本文编辑:聖然
- END -
Notice

浙大文物数字化
微信号|zdwwszh
联系方式|0571-88273145

















 915
915

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









