







 本文介绍了AUTOSAR架构中CAN Interface的角色,它作为CAN Driver和上层通讯服务层之间的桥梁,负责CAN通讯、UDS服务和XCP服务。详细阐述了发送操作中CanIf_Transmit函数的工作流程,接收操作中CanIf_RxIndication函数如何处理接收到的数据,并详细讨论了ID的映射关系,强调了配置过程中ID对应的重要性。
本文介绍了AUTOSAR架构中CAN Interface的角色,它作为CAN Driver和上层通讯服务层之间的桥梁,负责CAN通讯、UDS服务和XCP服务。详细阐述了发送操作中CanIf_Transmit函数的工作流程,接收操作中CanIf_RxIndication函数如何处理接收到的数据,并详细讨论了ID的映射关系,强调了配置过程中ID对应的重要性。
前言:
上篇文章 “ AUTOSAR架构的CAN Driver” (可点开) 简介了AUTOSAR架构的CAN Driver模块,本文将更进一步,来了解CAN Driver模块对接的唯一上层模块--CAN Interface。CAN interface
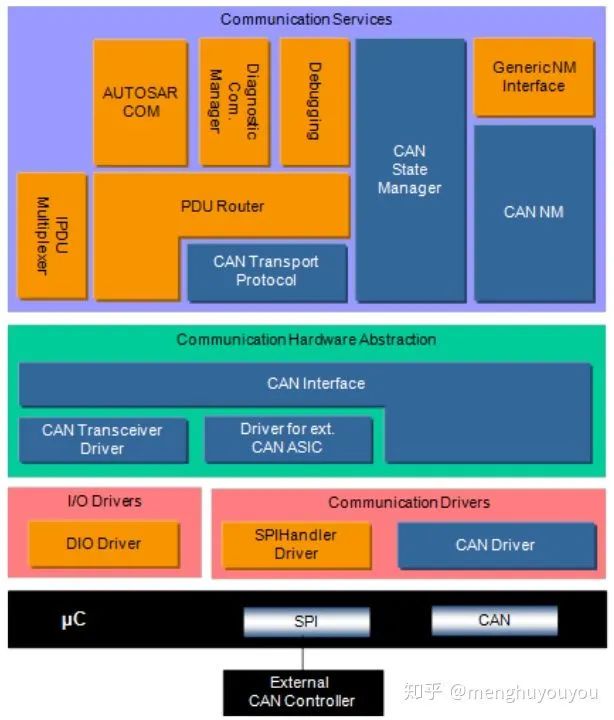
CAN Interface,顾名思义,CAN接口模块,位于下层的CAN设备驱动(CAN Driver,CAN收发器驱动)和上层的通讯服务层(CAN传输协议层,Pdu Router等)之间,如下图1所示。
引自[1]:
CAN接口模块由所有与CAN硬件无关的任务组成,这些任务属于相应ECU的CAN通讯设备驱动程序。这些功能在CAN接口模块中执行一次,以便底层CAN设备驱动程序只专注于访问和控制相应的特定CAN硬件设备。
CAN接口模块满足PDU路由器和上层通信Com模块的主控制流和数据流要求:发送请求处理、发送确认/接收指示等。它的数据处理和通知API是基于CAN L-SDU,而用于控制和模式处理的API提供了一个与CAN控制器相关视角。
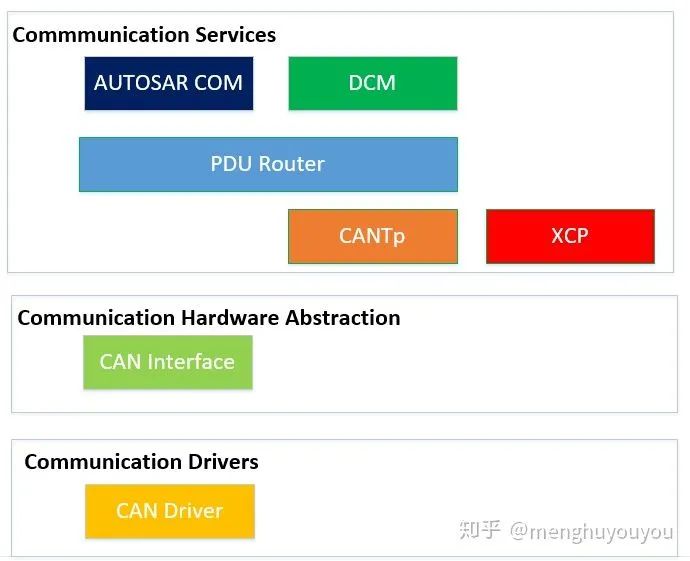
对于CAN Driver来说,与上层模块通讯的唯一接口就是CAN接口模块,通过这个模块可实现我们熟知的3个ECU通讯功能:
CAN通讯,通过接口层到PDU Router模块;(路径:CanDrv--CanIf--PduR--Com)
UDS服务,通过接口层到CANTp模块;(路径:CanDrv--CanIf--CanTp--PduR--Dcm)
XCP服务,通过接口层到XCP模块。(路径:CanDrv--CanIf--XCP)
本文关注的是CAN通讯功能,继续采用上篇文章menghuyouyou:CAN通讯系列--AUTOSAR架构的CAN Driver6 的思路来介绍CAN接口模块。
考虑到本文主要基于参考[1]而来,不打算对某些细节展开说明,将主要介绍CAN发送和接收相关的函数。若真有需要研究CAN通讯在CAN接口模块的具体实现,则肯定需要对实现细节一一研究,比如上篇文章提到的CAN接收和发送的前提条件有哪些,是什么。接下来我们来CAN接口模块的发送和接收操作:
1
发送操作
由前面内容可知
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 810
810

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









