






printf 函数支持 + fputc重定向
串口设置步骤
1) 串口时钟使能,GPIO 时钟使能。
串口是挂载在 APB2 下面的外设。
2) 串口复位
当外设出现异常的时候可以通过复位设置,实现该外设的复位,然后重新配置这个外设达到让其重新工作的目的。
3) GPIO 端口模式设置
4) 串口参数初始化
5) 开启中断并且初始化 NVIC(如果需要开启中断才需要这个步骤)
6) 使能串口
7) 编写中断处理函数
数据收发
STM32 的发送与接收是通过数据寄存器 USART_DR 来实现的,这是一个双寄存器,包含了 TDR 和 RDR。当向该寄存器写数据的时候,串口就会自动发送,当收到收据的时候,也是存在该寄存器内。
串口状态
通过状态寄存器 USART_SR 读取
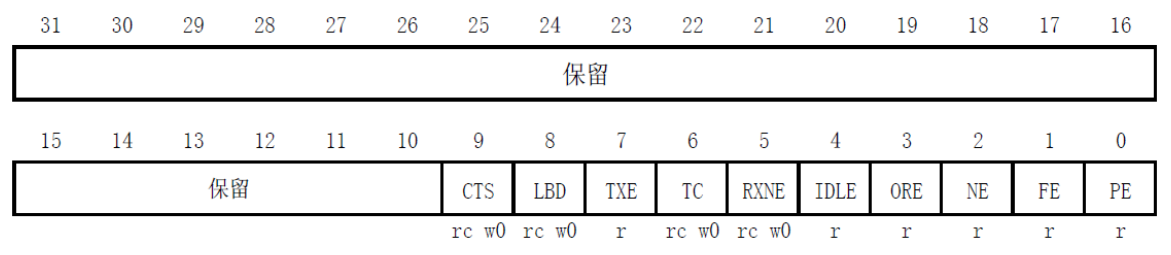
RXNE(读数据寄存器非空),当该位被置 1 的时候,就是提示已经有数据被接收到了,并且可以读出来了。这时候我们要做的就是尽快去读取 USART_DR,通过读 USART_DR 可以将该位清零,也可以向该位写 0,直接清除。
TC(发送完成),当该位被置位的时候,表示 USART_DR 内的数据已经被发送完成了。如果设置了这个位的中断,则会产生中断。该位也有两种清零方式:1)读 USART_SR,写USART_DR。2)直接向该位写 0。
串口使能
开启串口响应中断
获取相应中断状态
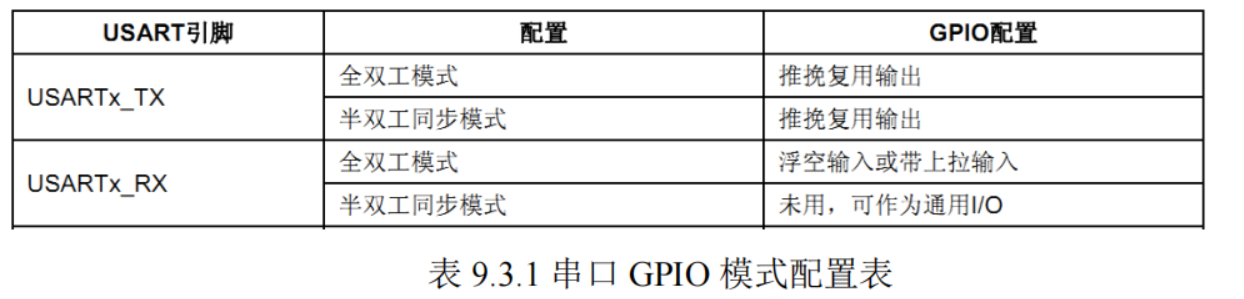
GPIO对应的模式配置
若配置全双工的串口 1,那么 TX(PA9)管脚需要配置为推挽复用输出,RX(PA10)管脚配置为浮空输入或者带上拉输入。
《STM32不完全手册-库函数版本 V3.1》















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









