







 这篇博客探讨了使用OpenCV进行轮廓检测时如何计算物体的旋转角度。作者指出目前实现的效果存在一些问题,并提供了相关的代码参考链接,鼓励读者共同参与讨论和改进。
这篇博客探讨了使用OpenCV进行轮廓检测时如何计算物体的旋转角度。作者指出目前实现的效果存在一些问题,并提供了相关的代码参考链接,鼓励读者共同参与讨论和改进。
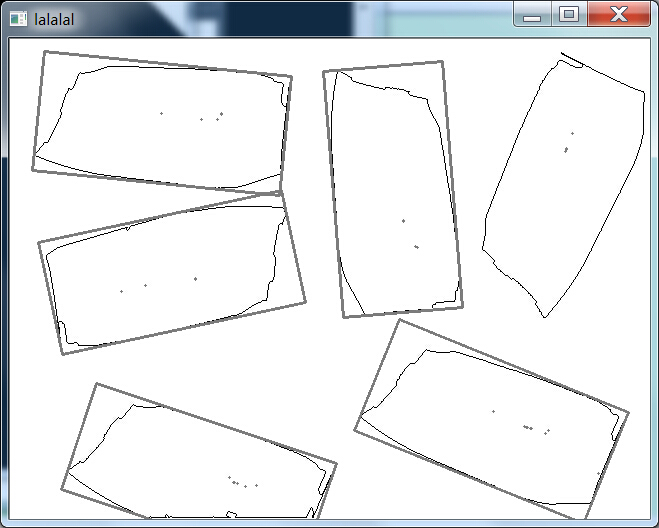
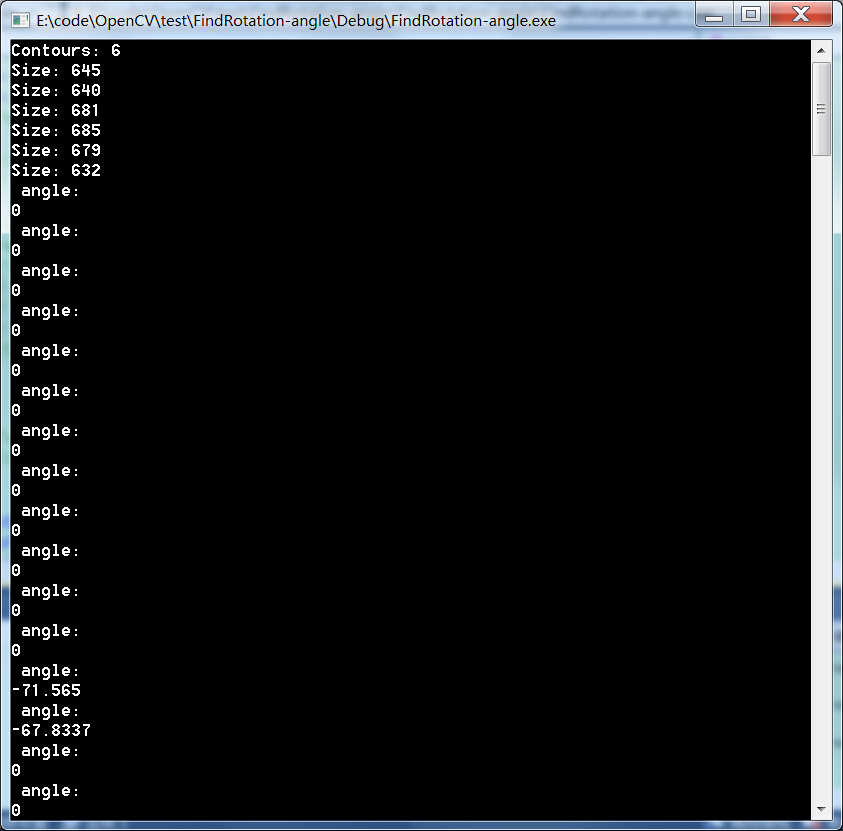
效果还是有点问题的,希望大家共同探讨一下

// FindRotation-angle.cpp : 定义控制台应用程序的入口点。
//
// findContours.cpp : 定义控制台应用程序的入口点。
//
#include "stdafx.h"
#include <iostream>
#include <vector>
#include <opencv2/opencv.hpp>
#include <opencv2/core/core.hpp>
#include <opencv2/imgproc/imgproc.hpp>
#include <opencv2/highgui/highgui.hpp>
#pragma comment(lib,"opencv_core2410d.lib")
#pragma comment(lib,"opencv_highgui2410d.lib")
#pragma comment(lib,"opencv_imgproc2410d.lib")
#define PI 3.1415926
using namespace std;
using namespace cv;
int hough_line(Mat src)
{
//【1】载入原始图和Mat变量定义
Mat srcImage = src;//imread("1.jpg"); //工程目录下应该有一张名为1.jpg的素材图
Mat midImage,dstImage;//临时变量和目标图的定义
//【2】进行边缘检测和转化为灰度图
Canny(srcImage, midImage, 50, 200, 3);//进行一此canny边缘检测
cvtColor(midImage,dstImage, CV_GRAY2BGR);//转化边缘检测后的图为灰度图
//【3】进行霍夫线变换
vector<Vec4i> lines;//定义一个矢量结构lines用于存放得到的线段矢量集合
HoughLinesP(midImage, lines, 1, CV_PI/180, 80, 50, 10 );
//【4】依次在图中绘制出每条线段
for( size_t i = 0; i < lines.size(); i++ )
{
Vec4i l = lines[i];
line( ds 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









