







我想通过一个例子来介绍一下行为树的基本概念,会比较容易理解,看下图:
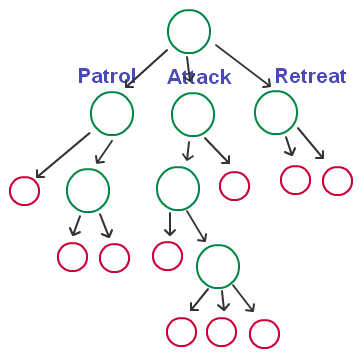
这是我为一个士兵定义的一棵行为树(可以先不管这些绿圈和红圈是干吗的),首先,可以看到这是一个树形结构的图,有根节点,有分支,而且子节点个数可以任意,然后有三个分支,分别是巡逻(Patrol),攻击(Attack),逃跑(Retreat),这个三个分支可以看成是我们为这个士兵定义的三个大的行为(Behavior),当然,如果有更多的行为,我们可以继续在根节点中添加新的分支。当我们要决策当前这个士兵要做什么样的行为的时候,我们就会自顶向下的,通过一些条件来搜索这颗树,最终确定需要做的行为(叶节点),并且执行它,这就是行为树的基本原理。
值得注意的是,我们标识的三大行为其实并不是真正的决策的结果,它只是一个类型,来帮助我们了解这个分支的一些行为是属于这类的,真正的行为树的行为都是在叶节点上,一般称之为行为节点(Action Node),如下图红圈表示的
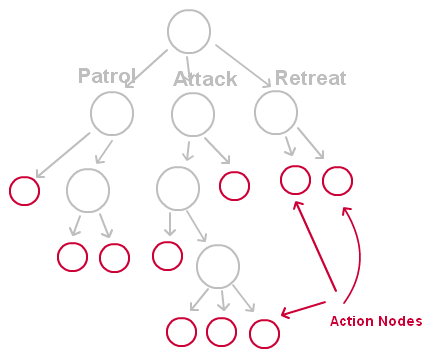
这些叶节点才是我们真正通过行为树决策出来的结果,如果用我以前提到的那个层次化的AI结构来描述的话,这些行为结果,相当于就是一个个定义好的“请求”(Request),比如移动(Move),无所事事(Idle),射击(Shoot)等等。所以行为树是一种决策树,来帮助我们搜寻到我们想要的某个行为。
行为节点是游戏相关的,因不同的游戏,我们需要定义不同的行为节点,但对于某个游戏来说,在行为树上行为节点是可以复用的,比如移动,在巡逻的分支上,需要用到,在逃跑分支上,也会用到,这种情况下,我们就可以复用这个节点。行为节点一般分为两种运行状态:
运行中(Executing):该行为还在处理中
完成(Completed):该行为处理完成,成功或者失败
除了行为节点,其余一般称之为控制节点(Control Node),用树的“学名”的话,就是那些父节点,如下图绿圈表示
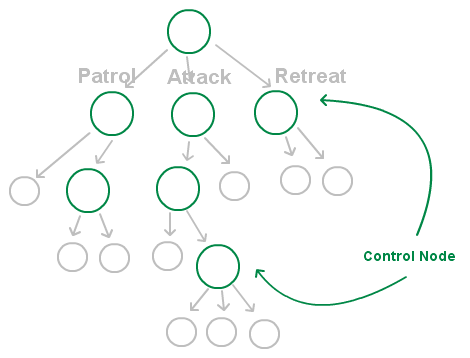
控制节点其实是行为树的精髓所在,我们要搜索一个行为,如何搜索?其实就是通过这些控制节点来定义的,从控制节点上,我们就可以看出整个行为树的逻辑走向,所以,行为树的特点之一就是其逻辑的可见性。
我们可以为行为树定义各种各样的控制节点(这也是行为
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章
















 947
947











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









