






近年来,救援机器人开始了开挂模式,发展极其迅速。以色列班古里安大学 David Zarrouk 博士带领的研究团队正在研发的 Single Actuator Wave-likeRobot(单独制动器波形机器人:又叫 SAW 机器人)可以深入到复杂多变的环境中展开救援行动(比如隧道、已被破坏的房屋、管子等地方),当然,还可以除了用于医疗(比如肠道检测)。
这款新型的仿生机器人 SAW 灵感来源于蛇,它可以如蛇一样爬行。SAW 机器人的设计也相当简单,单靠一个马达驱动。机器人螺旋式的「脊梁」采用刚性材料,跟 3D 打印的塑料结合组成履带,当螺旋旋转时,履带就上下移动,并推动机器人前进。
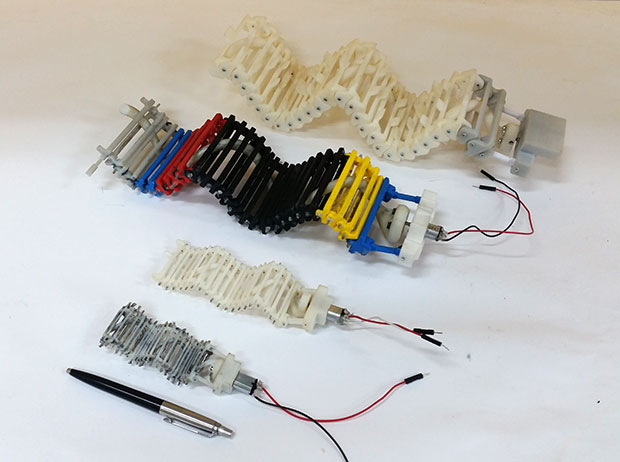
SAW 机器人跟许多蠕虫一样,靠不断推进的正弦波移动,移动速度只跟正弦波的速度有关。而「脊梁」的构造使正弦波的速度提升了 13%,在每片履带接触地面的时候,这样的构造会使有效的旋转速度增加,也就是说每 6 个正弦周期,机器人能够向前 7 个波长。最大版本的 SAW 机器人最高速度可达到 57cm/s,也就是或每秒 5.6 个波长,而且,机器人的每片履带不会与地面产生很大的相对移动,这让机器人行走起来也十分平稳。
不过,由于 SAW 机器人的推进方式只在某一方向上起作用(向前和向后),为了满足多方位的运动,这就需要用到一些轮子在辅助操控,在机器人头部用来引导方向。
其独特的运动技能让它能够在不同的表面(包括沙地、草地、碎石地等)爬行,不仅如此,像游泳以及越过障碍物这样的技能都可以是实现。其游泳的速度可以达到 6 cm/s,在身体接触到隧道两侧的情况下,它穿越隧道的速度可达到 8cm/s。
Zarrouk 也表示,团队正在研究 SAW 机器人在光滑表面以及黏性液体条件下的运动,假如将 SAW 机器人做得足够小,还可以在肠道中游走拍摄和活体检验。不过,对于他们来说,最大的挑战应该就是,如何开发出一种能随时改变波的振幅和频率的运动方式,这能使机器人在更崎岖的地形以及管道下高效的开展工作。















 524
524











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









