






 本文介绍了3D对称度检测在Halcon中的应用,探讨了其与平面度、位置度的关系,以及在GD&T中的地位。对称度用于确保工件两要素相对于基准平面的一致性,但检测困难,常被位置度替代。文章提供了一个U型旋转接头的案例,并强调了避免使用对称度的注意事项。
本文介绍了3D对称度检测在Halcon中的应用,探讨了其与平面度、位置度的关系,以及在GD&T中的地位。对称度用于确保工件两要素相对于基准平面的一致性,但检测困难,常被位置度替代。文章提供了一个U型旋转接头的案例,并强调了避免使用对称度的注意事项。
对称度与同轴度已在2018版GD&T中取消,相关应用由位置度代替;但为了更好的理解GD&T的做法,另外也为了正确理解工作中遇到的旧版标注,为此拿出来和大家一块交流回顾一下。
符号
对称度
关联基准:必须
调用M圈/L圈:否
标注样式:
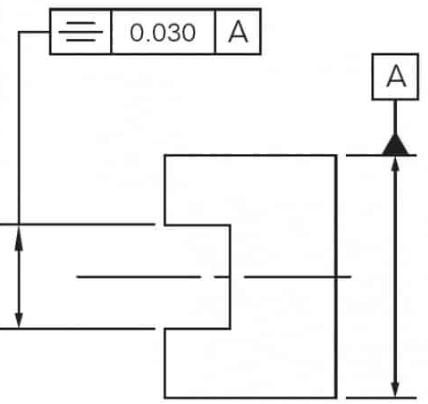
对称度标注
描述
对称度是一个3D公差,用于确保工件上两要素相对于基准平面是一致的;要求两个表面要素上的每个点对的中点落在中心平面附近,中心平面由基准构建。因此只有整个表面的所有中点落在公差带内才OK。
对称度并不是很常见的GD&T调用,其功能用途非常有限,中心位置完全可以采用位置度管控,而且对称性的检测也很困难。
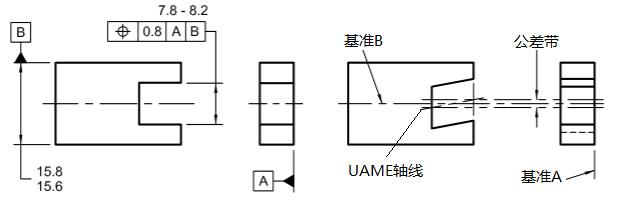
这里要说明一下,对称度与同轴度的评价对象为中心点集合,而位置度的评价对象为完美的UAME轴线或中心平面。
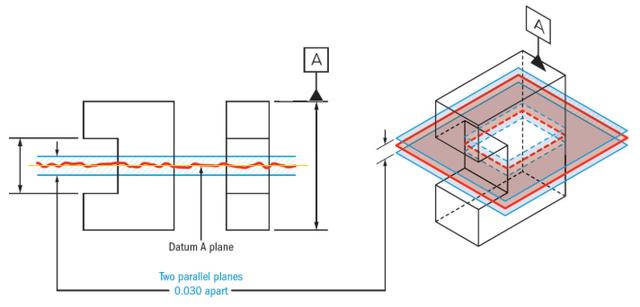
公差带
两平行平面之间的区域,且对称于基准中心平面;被测要素所有点对的中点必须置于其中;
公差带
检测
如前面所说,对称度是很难测量的。因为它的公差带被限制在一个虚拟平面,不可能有检测设备可以快速且正确地测量这个要素。通常,采用三坐标机来测量:
step1:建立基准中心平面
step2:测量两个被测要素的表面
step3:评估所有点对的中心是否落在公差带内
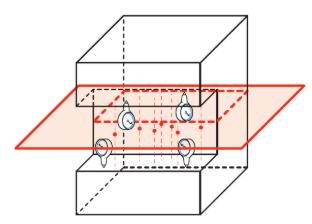
检测方法
关系
对称度是同轴度的非圆版本,同轴度是相对基准轴的对称度。两者都是将中心要素约束在特定的范围内,以保证工件的一致性。
应用场景
当你想确保两个对称要素的中心平面始终保持在恒定的中心,且工件表面具有一致形状时,可考虑调用对称度。通常,对称度只应用于要求质量平衡、形状分布的场景,在大多数情况下,最好不要使用,因为这是一个非常难以测量的标号,可以由位置度代替。
案例
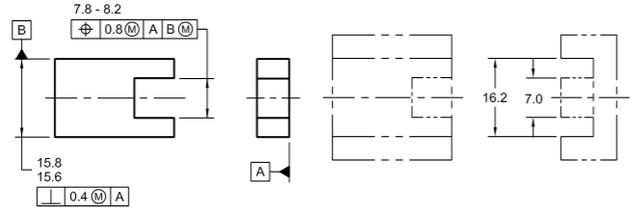
一U型旋转接头上需要始终保持平衡的凹槽结构,你需要确保配合工件始终位于凹槽的中心位置,并且表面形状一致,而不是加宽凹槽(将导致连接松动),此时可以调用对称性。
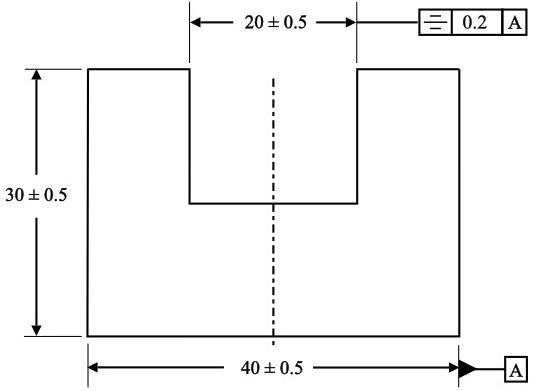
凹槽图样
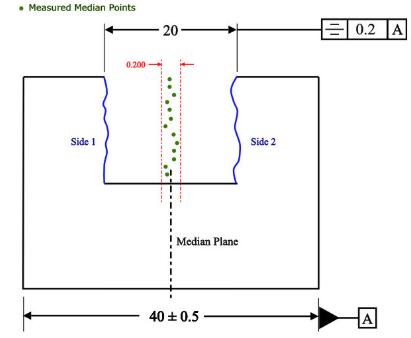
公差带及检测示意图
注意事项
因其特殊的功能要求和测量难度,在大多数情况下应避免调用对称度。
调用平面度、平行度和位置度,可以找到完全相同的约束条件,尽管需要更多的调用和测量。但是,位置度可以用功能检具测量(如果调用MMC),平面度可由尺寸公差自动控制,并直接从表面测量,这些都可以在一个进程中完成,不需要先进的CMM测量。
对称度VS位置度:
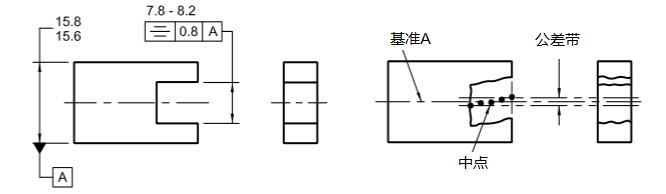
对称度
RFS位置度代替对称度
MMC位置度+功能检具代替对称度
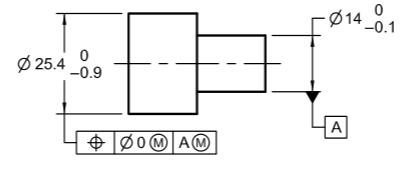
0@MMC位置度代替同轴度/对称度
免责声明:
文中图片来源于网络,如有版权问题请联系作者删除!

















 479
479

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









