







空域滤波
空域滤波是指对图像中每个像素为中心的邻域进行预定义操作,然后用得到的结果代替邻域中心像素点的像素值。滤波器的中心访问输入图像中的每个像素,就生成了滤波后的图像。
空域滤波器可分为线性空域滤波器和非线性空域滤波器。如果在图像像素上执行的是线性操作,则该滤波器称为线性空间滤波器,否则,滤波器就称为非线性空间滤波器。
1、线性空域滤波
我们关注奇数尺寸m×n(假设m=2a+1且n=2b+1)的滤波器,因为滤波器的中心落在整数值上。
一般来说,使用大小为m×n的滤波器对大小为M×N的图像进行线性空间滤波,可由下式表示:
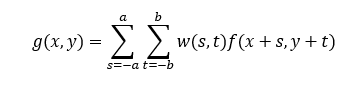
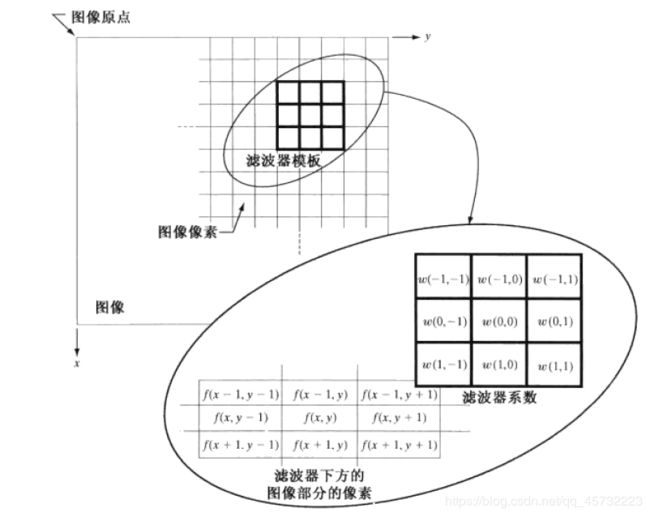
其中,w(s,t)是滤波器系数,g(x,y)是滤波器系数与由该滤波器包围的图像像素的乘积之和。x和y是可变的,以便w中的每个像素可访问f中的每个像素。
使用3×3的滤波器模板线性空间滤波的机理:
空间相关与卷积:相关是滤波器模板移过图像并计算每个位置乘积之和的处理。卷积的机理类似,但滤波器首先要旋转180°。因此,如果滤波器模板是对称的,相关和卷积将
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章
















 463
463











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









