







 本文介绍了图像复原的基本概念,强调其与图像增强的区别。详细探讨了图像退化过程模型,包括空间域和频域表示,并深入讲解了不同类型的噪声模型,如高斯噪声、瑞利噪声、伽马噪声等。此外,文章还讨论了周期噪声及其处理方法。在噪声存在下,重点阐述了几种空间滤波技术,如均值滤波、中值滤波和自适应滤波器,它们在去除噪声和保留图像细节方面的作用。
本文介绍了图像复原的基本概念,强调其与图像增强的区别。详细探讨了图像退化过程模型,包括空间域和频域表示,并深入讲解了不同类型的噪声模型,如高斯噪声、瑞利噪声、伽马噪声等。此外,文章还讨论了周期噪声及其处理方法。在噪声存在下,重点阐述了几种空间滤波技术,如均值滤波、中值滤波和自适应滤波器,它们在去除噪声和保留图像细节方面的作用。
数字图像处理笔记—图像复原(一)
0 概述
定义:图像复原,即利用退化现象的某些先验知识来重建或复原被退化的图像。
与图像增强的区别:图像增强是一个主观的过程,即突出所关心的内容,满足人的视觉系统;图像复原是一个客观的过程,它的最终目的是改善给定的图像,即恢复退化图像的本来面目,忠实于原始图像。
1 图像退化/复原过程模型
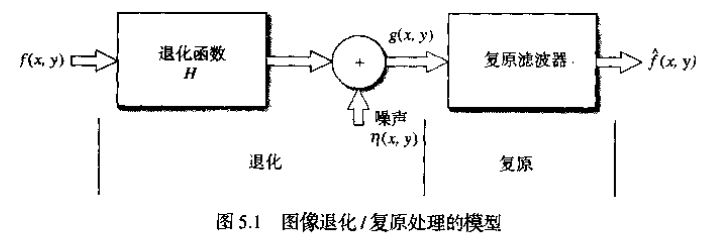
空间域:
g(x,y)=h(x,y)*f(x,y)+η(x,y)
频域:
G(u,v)=H(u,v)F(u,v)+N(u,v)
2 噪声模型
2.1 噪声来源
主要来源于图像的获取和传输过程。例如,CCD摄像机获取图像,光照程度和传感器温度是生成图像中产生大量噪声的主要因素;传输过程受所用传输信道的噪声干扰。
2.2 一些重要的噪声概率密度函数(PDF)
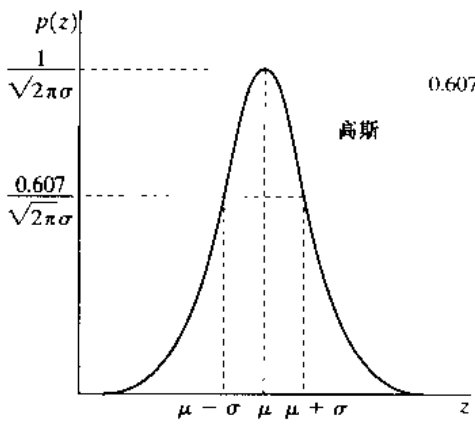
- 高斯噪声
概率密度函数: p(z)=12π√σe−(z−μ)2/2σ2
均值: μ
方差: σ2
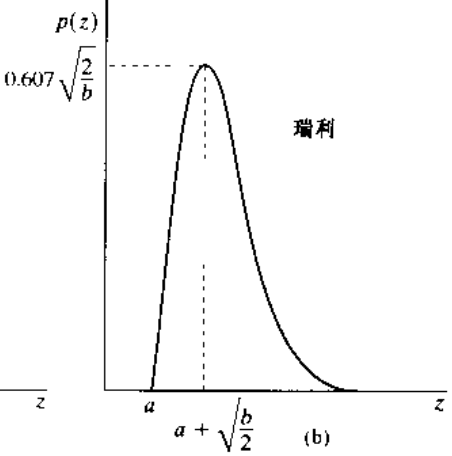
曲线: - 瑞利噪声
概率密度函数:
p(z)={ 2b(z−a)e−(z−a)2/b,0,z≥az<a
均值: μ=a+πb−−√/4
方差: σ2=b(4−π)4
曲线:
3.伽马(爱尔兰)噪声
p(z)=⎧⎩⎨abz(b−1)(b−1)!e−az,0,z≥0z<0
均值: μ=ba
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章
















 173
173

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









