







简介:本文档是一个精选的代码资源集,专为计算机视觉爱好者和开发者准备,由博主浅墨分享。这些代码示例在Visual Studio 2010环境下使用OpenCV库编写,覆盖了从基础图像处理到复杂特征检测的广泛主题。通过这些示例,初学者可以学习OpenCV的API并理解如何在实际应用中使用这些函数,而经验丰富的开发者可以找到快速的参考来解决特定问题。请在学习目的下使用这些代码,勿用于商业项目。 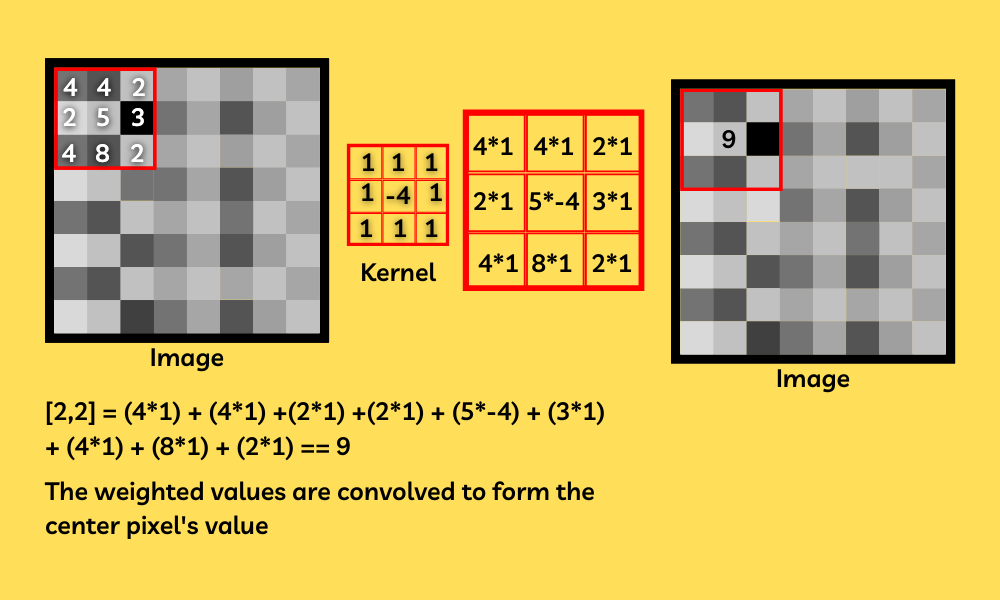
1. OpenCV计算机视觉库简介
1.1 OpenCV的起源与发展
OpenCV,即开源计算机视觉库(Open Source Computer Vision Library),是一个跨平台的计算机视觉和机器学习软件库。它由英特尔公司于1999年启动,并由Willow Garage支持,目前已经发展成为最受欢迎的开源视觉处理库之一。OpenCV的目的是通过提供易于使用的编程接口,加速计算机视觉在商业和学术研究中的应用。
1.2 应用领域
OpenCV被广泛应用于多个领域,包括图像处理、增强现实、医学成像、安全监控、人机交互、机器人、影视后期制作等。其高效的处理能力和成熟的算法库,使得OpenCV成为研究和开发计算机视觉相关应用不可或缺的工具。
1.3 核心功能和优势
OpenCV的核心功能包括图像处理、视频分析、特征检测、物体识别和跟踪。该库的优势在于它不仅提供了高效的编程接口,还拥有一个由全世界开发者共同维护的庞大算法库。此外,OpenCV具有良好的社区支持和文档资源,为学习和使用提供了极大的便利。
#include <opencv2/opencv.hpp>
#include <iostream>
int main() {
// 读取一张图片
cv::Mat image = cv::imread("path_to_image.jpg");
if (image.empty()) {
std::cout << "无法加载图片" << std::endl;
return -1;
}
// 显示图片
cv::namedWindow("Display window", cv::WINDOW_AUTOSIZE);
cv::imshow("Display window", image);
// 等待按键后退出
cv::waitKey(0);
return 0;
}
通过上述简单的代码示例,我们可以快速理解如何使用OpenCV来读取和显示一张图片,体会到它的易用性。这仅为冰山一角,后续章节将详细介绍OpenCV的更多功能及其应用。
2. 图像处理基础操作
2.1 图像的读取与显示
2.1.1 图像格式的识别与读取
在进行图像处理之前,首先要了解图像文件的格式。常见的图像格式包括但不限于BMP、JPEG、PNG、GIF和TIFF。OpenCV库支持多种图像格式的读取,其主要通过 cv2.imread() 函数来实现。通过传递不同的参数, imread() 可以控制读取图像的方式,包括以彩色、灰度模式或忽略图像的alpha通道来读取图像。
示例代码如下:
import cv2
# 彩色模式读取图像
image_color = cv2.imread('path/to/image.jpg', cv2.IMREAD_COLOR)
# 灰度模式读取图像
image_gray = cv2.imread('path/to/image.jpg', cv2.IMREAD_GRAYSCALE)
# 忽略alpha通道读取图像
image_ignore_alpha = cv2.imread('path/to/image.png', cv2.IMREAD_UNCHANGED)
在使用 imread() 函数时,第一参数是图像文件的路径,第二个参数是读取方式。 cv2.IMREAD_COLOR 是默认参数,表示以彩色图像读取。如果设置为 cv2.IMREAD_GRAYSCALE ,则图像以灰度模式读取。若设为 cv2.IMREAD_UNCHANGED ,则连同图像的alpha通道一起读取。
2.1.2 图像显示的基本方法和属性设置
图像读取之后,通常需要显示以供观察和后续处理。在OpenCV中,使用 cv2.imshow() 函数显示图像,并且可以设置窗口的标题。通过 cv2.waitKey() 函数,可以控制图像显示窗口的停留时间。如果需要结束显示,调用 cv2.destroyAllWindows() 即可关闭所有创建的窗口。
代码示例如下:
import cv2
# 读取图像
image = cv2.imread('path/to/image.jpg')
# 设置窗口标题
cv2.setWindowTitle('Image Display', 'My Image')
# 显示图像
cv2.imshow('My Image', image)
# 等待按键,参数设置为0表示无限等待
cv2.waitKey(0)
# 关闭所有窗口
cv2.destroyAllWindows()
在上述代码中, cv2.setWindowTitle() 设置窗口标题, cv2.imshow() 用于显示图像,其第一个参数为窗口的名称,第二个参数为要显示的图像。 cv2.waitKey() 函数用于设置在按键后才会继续执行代码的时间,单位是毫秒。如果传入值为0,则表示窗口会一直显示,直到用户按键。
2.2 图像的几何变换
2.2.1 图像的缩放和旋转
几何变换是图像处理中常见的一种操作,用于改变图像的尺寸(缩放)或者改变图像的视角(旋转)。OpenCV提供了 cv2.resize() 和 cv2.rotate() 函数来实现这些功能。
使用 cv2.resize() 函数可以对图像进行缩放。函数的参数包括原图像,以及一个可选的大小参数。当只提供缩放因子时,可以按比例改变图像尺寸;提供一个明确的尺寸参数时,可以指定新的尺寸来缩放图像。
import cv2
# 读取图像
image = cv2.imread('path/to/image.jpg')
# 缩放图像
# 第二个参数为新的尺寸,例如(300,300)表示将图像缩放到300x300大小
# 第三个参数为缩放因子,例如0.5表示宽度和高度都变为原来的50%
resized_image = cv2.resize(image, (300, 300), interpolation=cv2.INTER_AREA)
在上述代码中, cv2.resize() 函数实现了图像的缩放,其中 interpolation=cv2.INTER_AREA 参数在缩小图像时效果较好,它可以根据需要选择临近区域的点,而不是直接的线性插值。
旋转操作可使用 cv2.rotate() 函数,该函数支持三种旋转方式: cv2.ROTATE_90_CLOCKWISE (顺时针旋转90度)、 cv2.ROTATE_90_COUNTERCLOCKWISE (逆时针旋转90度)、 cv2.ROTATE_180 (旋转180度)。
import cv2
# 读取图像
image = cv2.imread('path/to/image.jpg')
# 顺时针旋转图像90度
rotated_image = cv2.rotate(image, cv2.ROTATE_90_CLOCKWISE)
2.2.2 图像的裁剪和拼接
图像的裁剪是提取图像中感兴趣的一部分,而图像的拼接则将两个或多个图像组合成一个大的图像。这些操作在图像处理中都有广泛应用。
裁剪可以通过指定裁剪区域的坐标来完成,使用NumPy数组切片的方式实现:
import cv2
# 读取图像
image = cv2.imread('path/to/image.jpg')
# 设置裁剪的左上角和右下角坐标
x, y = 100, 100
w, h = 200, 200
# 裁剪图像
cropped_image = image[y:y+h, x:x+w]
在上面的代码中,通过指定坐标 x, y 和区域的宽度 w 、高度 h 来裁剪出一个子图像。
图像的拼接可以手动完成,也可以通过OpenCV的相关函数如 cv2.add() 等实现像素的混合。此处展示一个简单的手动拼接例子:
import cv2
# 读取两个图像
image1 = cv2.imread('path/to/image1.jpg')
image2 = cv2.imread('path/to/image2.jpg')
# 确保两个图像有相同的大小
h, w = min(image1.shape[0], image2.shape[0]), min(image1.shape[1], image2.shape[1])
# 裁剪图像
image1 = image1[:h, :w]
image2 = image2[:h, :w]
# 拼接图像
result_image = cv2.hconcat([image1, image2]) # 水平拼接
# result_image = cv2.vconcat([image1, image2]) # 垂直拼接
在上面的代码中, cv2.hconcat() 函数实现了图像的水平拼接,而 cv2.vconcat() 则实现垂直拼接。
2.3 图像的滤波与增强
2.3.1 常用的滤波器和滤波效果
图像滤波是去除图像噪声和细节的过程,常用的滤波方法有均值滤波、中值滤波、高斯滤波和双边滤波等。OpenCV提供了 cv2.blur() 、 cv2.medianBlur() 、 cv2.GaussianBlur() 和 cv2.bilateralFilter() 等函数。
均值滤波适用于去除高斯噪声。通过计算一个像素邻域内所有像素的平均值,来替代中心像素,从而达到平滑图像的效果。中值滤波特别适用于去除椒盐噪声,它将邻域内所有像素的值排序,取中位数作为中心像素的值。高斯滤波在去除图像噪声的同时,还可以保留图像边缘信息。双边滤波则可以更精细地进行平滑,同时保留边缘特征。
示例代码:
import cv2
import numpy as np
# 读取图像
image = cv2.imread('path/to/image.jpg', cv2.IMREAD_GRAYSCALE)
# 均值滤波
mean_blur = cv2.blur(image, (5, 5))
# 中值滤波
median_blur = cv2.medianBlur(image, 5)
# 高斯滤波
gaussian_blur = cv2.GaussianBlur(image, (5, 5), 0)
# 双边滤波
bilateral_blur = cv2.bilateralFilter(image, 9, 75, 75)
在上面的代码中,对同一个灰度图像应用了四种不同的滤波方法。每个方法的第二个参数定义了滤波器的大小,例如 (5, 5) 表示邻域为5x5大小。
2.3.2 图像锐化和对比度增强技术
图像锐化和对比度增强是提升图像视觉效果的常见手段,通过突出图像的边缘和细节,使图像看起来更加清晰。在OpenCV中,这些效果可以通过不同的滤波器以及使用 cv2.addWeighted() 函数实现。
图像锐化常用的方法是应用一个锐化滤波器,例如拉普拉斯算子。在对比度增强方面,可以通过调整图像像素的亮度和对比度来实现。
示例代码:
import cv2
import numpy as np
# 读取图像
image = cv2.imread('path/to/image.jpg')
# 锐化滤波器核
sharpen_kernel = np.array([[-1, -1, -1],
[-1, 9, -1],
[-1, -1, -1]])
# 应用锐化滤波器
sharpened_image = cv2.filter2D(image, -1, sharpen_kernel)
# 增加对比度和亮度
alpha = 1.5 # 对比度控制(1.0-3.0)
beta = 30 # 亮度控制(0-100)
enhanced_image = cv2.convertScaleAbs(image, alpha=alpha, beta=beta)
在上面的代码中,使用了一个拉普拉斯算子的核作为锐化滤波器。 cv2.filter2D() 函数应用了这个核到图像中,实现了锐化效果。通过调整 alpha 和 beta 的值,使用 cv2.convertScaleAbs() 函数对图像的对比度和亮度进行了增强。
2.4 图像的仿射变换
仿射变换是图像处理中用于实现平移、旋转、缩放等几何变换的一种方法。OpenCV通过 cv2.getRotationMatrix2D() 和 cv2.warpAffine() 两个函数来实现仿射变换。
cv2.getRotationMatrix2D() 函数用于获取2D旋转的仿射变换矩阵,可以指定旋转的中心点、旋转角度和缩放因子。 cv2.warpAffine() 函数根据得到的仿射变换矩阵和原图像,应用仿射变换。
示例代码:
import cv2
# 读取图像
image = cv2.imread('path/to/image.jpg')
# 获取2D旋转的仿射变换矩阵
angle = 30.0
center = (image.shape[1]//2, image.shape[0]//2)
scale = 1.0
rotation_matrix = cv2.getRotationMatrix2D(center, angle, scale)
# 应用仿射变换进行旋转
rotated_image = cv2.warpAffine(image, rotation_matrix, image.shape[:2])
# 应用仿射变换进行平移
tx, ty = 50, 20
translation_matrix = np.float32([[1, 0, tx], [0, 1, ty]])
translated_image = cv2.warpAffine(image, translation_matrix, image.shape[:2])
在上述代码中, cv2.getRotationMatrix2D() 函数计算了图像绕其中心旋转30度的仿射变换矩阵。 cv2.warpAffine() 则根据该矩阵对原图像进行旋转。对于平移变换,首先构造了平移的仿射变换矩阵,然后应用到原图像上。
以上是图像处理基础操作的第二章内容,涵盖了图像的读取、几何变换、滤波与增强等多个重要话题,深入介绍了常用的操作方法及其在OpenCV中的实现。接下来将进入第三章,学习特征检测与对象识别的相关知识。
3. 特征检测与对象识别
3.1 边缘检测和轮廓识别
在计算机视觉领域,边缘检测和轮廓识别是两个非常重要的环节。边缘是图像中亮度变化最剧烈的地方,而轮廓则勾勒出物体的边界。边缘检测和轮廓识别在很多应用中都是非常核心的步骤,例如物体识别、场景分割、特征提取等。
3.1.1 边缘检测算法的原理与应用
边缘检测算法的原理主要是通过检测图像局部亮度变化来确定边缘的位置。经典的边缘检测算子包括Sobel、Canny、Prewitt等。这些算子通过在图像的水平和垂直方向上应用卷积操作,来计算梯度的幅值和方向。
以Canny边缘检测算法为例,其步骤大致如下:
- 使用高斯滤波器去除噪声。
- 计算图像梯度的幅度和方向。
- 应用非极大值抑制来细化边缘。
- 使用双阈值算法检测和连接边缘。
Canny边缘检测算法因其高效性和准确性,被广泛应用于各种图像处理和计算机视觉任务中。
import cv2
# 读取图像
image = cv2.imread('example.jpg', cv2.IMREAD_GRAYSCALE)
# 应用高斯滤波
blurred_image = cv2.GaussianBlur(image, (5, 5), 0)
# 使用Canny算子检测边缘
edges = cv2.Canny(blurred_image, 100, 200)
# 显示图像
cv2.imshow('Edges', edges)
cv2.waitKey(0)
cv2.destroyAllWindows()
在这段代码中,我们首先读取了一张灰度图像,然后使用高斯滤波去除噪声,接着应用Canny边缘检测算子来找出图像中的边缘。最后,我们展示了检测到的边缘。
3.1.2 轮廓发现的步骤和相关操作
轮廓的发现是从二值图像中找到物体的边界。轮廓不仅用于表示物体的形状,还可以用来测量物体的大小、形状以及检测物体之间的关系。
轮廓发现的步骤通常包括:
- 转换为二值图像:这一步通常通过阈值化实现。
- 寻找轮廓:使用OpenCV中的
findContours方法。 - 轮廓绘制:使用
drawContours方法在原图上绘制轮廓。
import cv2
import numpy as np
# 读取图像
image = cv2.imread('example.jpg')
gray = cv2.cvtColor(image, cv2.COLOR_BGR2GRAY)
# 应用阈值化处理
_, thresh = cv2.threshold(gray, 127, 255, cv2.THRESH_BINARY)
# 寻找轮廓
contours, _ = cv2.findContours(thresh, cv2.RETR_TREE, cv2.CHAIN_APPROX_SIMPLE)
# 绘制轮廓
cv2.drawContours(image, contours, -1, (0, 255, 0), 3)
# 显示图像
cv2.imshow('Contours', image)
cv2.waitKey(0)
cv2.destroyAllWindows()
在这段代码中,我们首先将图像转换为二值图像,然后找到轮廓,并在原图上绘制这些轮廓。通过这种方式,我们可以直观地观察到物体的边界。
3.2 特征点检测
特征点检测是计算机视觉中的一项关键技术,它用于识别图像中具有代表性的点,这些点称为关键点或特征点。特征点检测算法能够从图像中提取关键点,并通过特征描述符来描述每个关键点的周围信息。
3.2.1 SIFT、SURF等关键点检测算法
尺度不变特征变换(Scale-Invariant Feature Transform, SIFT)是一种非常强大的特征检测算法,它能检测出图像中的关键点,并对每个关键点提取出128维的特征描述符。SIFT具有尺度不变性和旋转不变性,因此能够处理不同尺度和旋转的图像。
加速稳健特征(Speeded-Up Robust Features, SURF)是SIFT的一个变种,它在速度上做了优化,但同样保留了尺度不变性和旋转不变性。
import cv2
# 读取图像
image = cv2.imread('example.jpg')
gray = cv2.cvtColor(image, cv2.COLOR_BGR2GRAY)
# 初始化SIFT检测器
sift = cv2.SIFT_create()
# 检测关键点和描述符
keypoints, descriptors = sift.detectAndCompute(gray, None)
# 绘制关键点
cv2.drawKeypoints(image, keypoints, image, flags=cv2.DRAW_MATCHES_FLAGS_DRAW_RICH_KEYPOINTS)
# 显示图像
cv2.imshow('SIFT Keypoints', image)
cv2.waitKey(0)
cv2.destroyAllWindows()
在这段代码中,我们使用了SIFT算法来检测图像中的关键点,并将这些点绘制到原图上。SIFT的关键点和描述符可以在不同的图像和条件下保持一致,非常适合用于图像匹配和三维重建。
3.2.2 特征描述符的生成与比较
特征描述符是关于图像局部区域的紧凑表示。一旦提取出关键点,就可以为每个关键点生成描述符。这些描述符能够代表图像中的局部特征,用于不同图像间的匹配。
为了比较不同图像间的特征,我们可以使用特征匹配算法。常用的特征匹配算法包括Brute-Force匹配和FLANN匹配。这些算法可以找出两幅图像之间的对应关键点。
import cv2
# 使用BFMatcher进行特征匹配
bf = cv2.BFMatcher(cv2.NORM_L2, crossCheck=True)
# 匹配两个图像的特征描述符
matches = bf.match(descriptors1, descriptors2)
# 根据距离排序
matches = sorted(matches, key=lambda x: x.distance)
# 绘制前N个匹配结果
img3 = cv2.drawMatches(image1, keypoints1, image2, keypoints2, matches[:10], None, flags=2)
# 显示图像
cv2.imshow('Matches', img3)
cv2.waitKey(0)
cv2.destroyAllWindows()
在这段代码中,我们使用了Brute-Force匹配器来找出两个图像集中的匹配对。匹配后的结果按照特征点之间的距离进行了排序,然后我们选择了距离最小的前10个匹配对,将其绘制在新图像上展示。
3.3 对象检测与分类
对象检测和分类是计算机视觉中的核心问题之一。它们在图像识别、视频分析、自动驾驶等领域发挥着重要作用。对象检测旨在确定图像中对象的位置和类别,而对象分类则是在已知对象位置的基础上,确定对象的具体类别。
3.3.1 Haar级联分类器的应用
Haar级联分类器是一种使用Haar特征进行对象检测的方法。Haar特征是一种简单的特征,它将图像分为多个区域,计算这些区域内的像素值之差。通过级联这些简单的特征,我们可以构建复杂的分类器来检测图像中的对象。
Haar级联分类器被广泛用于人脸检测等领域。它在训练时需要正负样本,然后使用Adaboost算法来训练分类器。
import cv2
# 加载预训练的Haar级联分类器
face_cascade = cv2.CascadeClassifier('haarcascade_frontalface_default.xml')
# 读取图像
image = cv2.imread('example.jpg')
# 将图像转换为灰度图
gray = cv2.cvtColor(image, cv2.COLOR_BGR2GRAY)
# 检测图像中的人脸
faces = face_cascade.detectMultiScale(gray, scaleFactor=1.1, minNeighbors=5, minSize=(30, 30))
# 在检测到的人脸周围画矩形框
for (x, y, w, h) in faces:
cv2.rectangle(image, (x, y), (x+w, y+h), (255, 0, 0), 2)
# 显示图像
cv2.imshow('Detected Faces', image)
cv2.waitKey(0)
cv2.destroyAllWindows()
在这段代码中,我们加载了一个预训练的Haar级联分类器,并使用它来检测图像中的人脸。检测到的人脸会被一个矩形框标记出来,并展示在原图上。
3.3.2 神经网络在对象识别中的角色
近年来,深度学习和卷积神经网络(Convolutional Neural Networks, CNNs)在对象识别和检测领域取得了显著的成果。CNN能够通过自动学习特征来识别和分类图像中的对象。
深度学习模型,如AlexNet、VGG、ResNet等,已经在多个图像识别竞赛中取得了优异的成绩。这些模型能够学习到复杂的、层级化的特征表示,并用于各种视觉任务。
import tensorflow as tf
from tensorflow.keras.applications import VGG16
from tensorflow.keras.preprocessing import image
from tensorflow.keras.applications.vgg16 import preprocess_input, decode_predictions
# 加载VGG16模型
model = VGG16(weights='imagenet')
# 加载并预处理图像
img_path = 'example.jpg'
img = image.load_img(img_path, target_size=(224, 224))
x = image.img_to_array(img)
x = np.expand_dims(x, axis=0)
x = preprocess_input(x)
# 预测类别
preds = model.predict(x)
print('Predicted:', decode_predictions(preds, top=3)[0])
在这段代码中,我们使用了Keras框架加载了VGG16预训练模型,并对一张图像进行了预测。通过这种方式,我们可以得到图像中可能存在的对象的类别和概率。
总的来说,特征检测和对象识别是计算机视觉技术中的重要分支,它们在各个行业有着广泛的应用。随着技术的不断进步,这一领域仍然具有极大的发展潜力和应用前景。
4. OpenCV版本和开发环境说明
4.1 OpenCV 2.4.8版本特性解析
4.1.1 OpenCV 2.4.8的改进与新增功能
在OpenCV的发展历程中,每个版本都带来了新的改进和功能,对于开发者而言,了解这些更新是至关重要的。OpenCV 2.4.8版本作为该系列中的一个里程碑,它不仅仅修复了早期版本中的一些漏洞,还带来了一系列新特性和改进。
OpenCV 2.4.8的一个显著改进是引入了对C++11标准的支持。这意味着开发者可以使用一些现代化的C++特性,例如智能指针、lambda表达式等,从而编写出更加简洁和安全的代码。新版本还增强了对ARM架构的优化,提升了在嵌入式设备上运行的性能和效率。
此外,OpenCV 2.4.8也增加了一些新的算法,特别是在视频分析、机器学习和光学流方面。视频分析功能得到了加强,使得开发更加高级的视频监控和分析应用成为可能。机器学习库中的决策树分类器得到了改进,增加了对多类分类的支持,并且在性能上有所提升。光学流算法也经过了优化,提供了更加精确的运动估计。
代码层面上,OpenCV 2.4.8提高了其API的易用性。库中的函数参数进行了优化,一些常用的函数参数变得更加直观,从而降低了学习曲线。同时,对许多常用函数进行了性能优化,使得在相同硬件条件下,可以处理更多的图像和数据。
值得一提的是,2.4.8版本中还修复了之前版本中发现的一些bug。这些bug的修复提升了库的稳定性和可靠性,使得开发者在使用OpenCV时更加放心。
4.1.2 与前后版本兼容性的注意事项
开发者在进行OpenCV版本升级时,需要注意的是,尽管新版本带来了许多改进,但是与前一个版本(如2.4.7)之间可能存在一些不兼容的地方。这些不兼容之处通常会体现在API变更、函数签名的修改以及删除了某些过时的特性等方面。
为了确保从旧版本平稳过渡到新版本,开发者在升级前需要仔细阅读OpenCV的官方文档,了解所有在升级过程中需要注意的兼容性问题。例如,某些函数可能已经被新的函数替代,或者参数的默认值发生了变化,这些都是升级时需要重点关注的。
在进行API的升级时,开发者可以利用一些IDE工具提供的代码重构功能来帮助定位并替换那些已经废弃或者修改了签名的函数。另外,一些第三方库可能依赖于特定版本的OpenCV,因此在升级后,需要重新测试这些依赖库,以确保它们能够在新版本的OpenCV上正常工作。
总之,OpenCV 2.4.8是一个功能丰富、性能优化的新版本,但同时也需要开发者仔细处理升级过程中可能遇到的兼容性问题。在进行升级之前,做好充分的准备工作,才能确保开发过程中的顺利进行。
4.2 Visual Studio 2010开发环境配置
4.2.1 OpenCV库的安装和配置步骤
在使用OpenCV进行计算机视觉项目的开发之前,首先需要配置一个合适的工作环境。对于Windows平台,Visual Studio是一个非常流行的选择,而2010版是最被广泛使用的版本之一。下面是安装和配置OpenCV库到Visual Studio 2010环境的详细步骤:
步骤1:下载OpenCV库
首先,需要从OpenCV官方网站或者其他可信赖的资源下载OpenCV 2.4.8版本的Windows安装文件。请注意下载与32位或64位系统相匹配的版本,以确保最佳兼容性。
步骤2:安装OpenCV
下载完成后,双击安装文件并按照向导提示进行安装。安装过程中可以选择安装路径,并且建议选择一个容易记住的位置,如C:\OpenCV2.4.8。安装过程中可能会询问是否安装示例和文档,如果需要参考示例代码或文档,可以一并安装。
步骤3:配置环境变量
为了在命令行中直接使用OpenCV相关命令,需要将OpenCV的bin目录添加到系统的环境变量PATH中。在Windows系统中,可以通过“控制面板” -> “系统” -> “高级系统设置” -> “环境变量”来设置。
步骤4:配置Visual Studio项目
打开Visual Studio 2010,创建一个新的C++项目。接下来需要为项目配置OpenCV库,以便能够正确引用OpenCV的头文件和库文件。
- 右键点击项目名称,选择“属性”。
- 在左侧树形菜单中选择“配置属性” -> “VC++目录”。
- 在“包含目录”中添加OpenCV的include目录路径(如
C:\OpenCV2.4.8\build\include)。 - 在“库目录”中添加OpenCV的lib目录路径(如
C:\OpenCV2.4.8\build\x64\vc10\lib,根据实际情况选择对应的目录)。
步骤5:添加引用和链接
在项目中添加OpenCV库的引用,可以通过配置链接器来实现:
- 在“配置属性” -> “链接器” -> “输入”中添加OpenCV的库文件(如
opencv_core248.lib,opencv_imgproc248.lib等,具体取决于你的项目需要引用哪些模块)。 - 确保在“附加依赖项”中列出所有需要的OpenCV库文件。
通过以上步骤,Visual Studio 2010环境就配置好了OpenCV库。此时,应该可以在项目中包含OpenCV的头文件,并且链接OpenCV的库文件了。
4.2.2 开发环境的优化与调试技巧
一个配置良好的开发环境不仅能提高开发效率,还可以在调试过程中帮助开发者迅速定位问题。Visual Studio 2010作为Windows平台上经典的开发工具之一,其强大的调试功能对OpenCV开发同样适用。下面是一些优化和调试技巧:
代码格式化与自动缩进
使用Visual Studio的代码格式化功能可以帮助开发者保持代码的一致性和可读性。可以通过快捷键 Ctrl+K, Ctrl+D 快速格式化整个文档。
代码折叠
当处理大量代码时,代码折叠可以帮助开发者专注于当前任务。可以通过双击代码左侧的空白区域或者使用快捷键 Ctrl+M, M 来折叠和展开代码块。
调试窗口
Visual Studio的调试窗口对于跟踪程序运行状态和诊断问题非常有用。可以使用“局部变量”窗口来监视当前作用域内的变量值;“监视”窗口可以添加特定变量进行持续跟踪;“调用堆栈”窗口则能够显示当前的函数调用路径。
断点和条件断点
设置断点是在调试过程中非常常见的操作,可以在代码的特定行上停止执行,允许开发者逐行执行代码。右击代码行号旁边的空白区域即可设置断点。条件断点则需要点击快捷工具栏中的“断点设置”来指定一个条件,只有当该条件成立时,程序才会在该断点处停止。
变量和内存查看
“即时窗口”允许开发者输入表达式并立即获取其值。此外,“内存”窗口可以用来查看和修改进程内存中的数据,这对于分析图像数据尤其有用。
性能分析
Visual Studio的性能分析工具可以帮助开发者找出程序中的性能瓶颈。使用“性能分析器”可以对程序运行期间的CPU使用、调用堆栈进行详细分析。
通过应用上述技巧,开发者可以大幅提高使用Visual Studio 2010进行OpenCV开发的效率,同时更好地理解代码和调试过程中出现的问题。
5. 代码示例集的学习与参考价值
5.1 代码示例的精选与分类
代码示例是学习和理解OpenCV库功能的重要工具,它可以帮助我们快速掌握函数的使用方法,并在实际项目中应用。在本章节中,我们将重点介绍如何根据不同的学习需求精选和分类代码示例。
5.1.1 基础操作的典型示例
对于初学者而言,从基础操作开始是进入OpenCV世界的最佳路径。以下是一些经典的基础操作示例,涵盖了图像的读取、显示、基本变换等:
import cv2
# 图像的读取与显示
image = cv2.imread('example.jpg')
cv2.imshow('Loaded Image', image)
cv2.waitKey(0)
# 图像的缩放操作
resized_image = cv2.resize(image, (400, 300))
cv2.imshow('Resized Image', resized_image)
cv2.waitKey(0)
# 图像的转换为灰度图
gray_image = cv2.cvtColor(image, cv2.COLOR_BGR2GRAY)
cv2.imshow('Grayscale Image', gray_image)
cv2.waitKey(0)
这些示例代码将帮助初学者理解OpenCV中的核心函数及其用法,为他们继续学习更高级的功能打下坚实的基础。
5.1.2 中高级应用的精选案例
对于有一定基础的开发者,中高级的示例代码能够帮助他们深入理解OpenCV的高级功能,例如:特征检测、对象识别、图像分割等。
# 使用SIFT进行关键点检测
sift = cv2.SIFT_create()
keypoints, descriptors = sift.detectAndCompute(gray_image, None)
# 使用Haar级联进行人脸检测
face_cascade = cv2.CascadeClassifier(cv2.data.haarcascades + 'haarcascade_frontalface_default.xml')
faces = face_cascade.detectMultiScale(gray_image, scaleFactor=1.1, minNeighbors=5)
for (x, y, w, h) in faces:
cv2.rectangle(image, (x, y), (x+w, y+h), (255, 0, 0), 2)
cv2.imshow('Detected Features', image)
cv2.waitKey(0)
这些精选案例不仅展示了如何应用这些算法,而且为读者提供了可操作的代码,助于他们理解算法背后的原理及应用情景。
5.2 代码的解读与拓展应用
深入理解代码示例的核心逻辑,有助于我们对算法和函数的内部机理有更深入的认识。同时,这些示例也为我们提供了拓展创新思路的灵感来源。
5.2.1 核心代码的解读与分析
让我们以一个典型的边缘检测案例为例,分析其核心代码:
# 使用Canny算子进行边缘检测
edges = cv2.Canny(gray_image, 100, 200)
# 边缘检测图像的显示
cv2.imshow('Detected Edges', edges)
cv2.waitKey(0)
在这段代码中, cv2.Canny 函数实现了Canny边缘检测算法。这个算法通过计算图像的梯度幅值并进行非极大值抑制,然后利用双阈值和滞后操作来确定边缘。参数100和200分别代表了高阈值和低阈值。
5.2.2 代码示例的改进与创新思路
通常,一个代码示例可以经过修改和优化以适应不同的应用场景。例如,在边缘检测中,我们可以修改阈值来优化边缘的检测效果,或者应用高斯模糊来减少噪声的影响。
# 应用高斯模糊减少噪声影响
blurred_image = cv2.GaussianBlur(gray_image, (5, 5), 0)
edges = cv2.Canny(blurred_image, 100, 200)
cv2.imshow('Enhanced Edges', edges)
cv2.waitKey(0)
通过增加这一步骤,我们可以得到更加平滑和准确的边缘检测结果,这对于进一步的图像分析和处理非常有价值。此外,通过结合其他图像处理技术,我们可以创造出新的应用场景,例如结合图像分割和特征检测技术,用于复杂背景下的目标检测。
以上内容展示了如何通过分析和改进代码示例,不断学习和创新,从而提升我们使用OpenCV进行计算机视觉项目的开发能力。
简介:本文档是一个精选的代码资源集,专为计算机视觉爱好者和开发者准备,由博主浅墨分享。这些代码示例在Visual Studio 2010环境下使用OpenCV库编写,覆盖了从基础图像处理到复杂特征检测的广泛主题。通过这些示例,初学者可以学习OpenCV的API并理解如何在实际应用中使用这些函数,而经验丰富的开发者可以找到快速的参考来解决特定问题。请在学习目的下使用这些代码,勿用于商业项目。















 7万+
7万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









