







简介:线性离散系统是自动控制和信号处理的关键,而MATLAB提供了一个强大的平台来进行这些系统的可控性与可观性分析。本文将介绍如何利用MATLAB对线性离散系统进行可控性与可观性的概念定义、矩阵计算和可视化分析,并通过实例演示如何使用MATLAB内置函数实现系统分析、测试和优化。 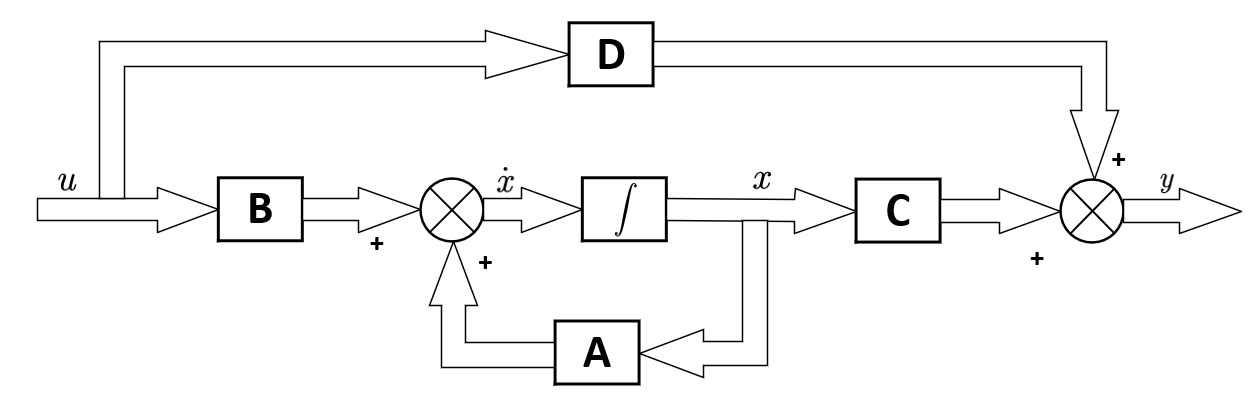
1. 线性离散系统定义与表示
在动态系统的分析与设计中,线性离散系统是一类基础而重要的模型。它允许我们通过一系列离散的时间点来描述系统的状态变化,这对于计算机控制和数字信号处理等领域至关重要。线性离散系统的数学表示通常以差分方程或状态空间形式出现,每一种表示方法都有其特定的适用场景和分析方法。
1.1 差分方程模型
差分方程模型是描述线性离散系统最直观的方式之一。它将系统的输出和输入之间的关系以离散时间步长的差分形式表达。例如,一个一阶差分方程可以表示为:
[ y[k+1] = a_0 y[k] + b_0 u[k] ]
其中,( y[k] ) 表示在第 ( k ) 个时间点的输出,( u[k] ) 是相应的输入,系数 ( a_0 ) 和 ( b_0 ) 定义了系统的行为。
1.2 状态空间模型
状态空间模型则提供了另一种视角来描述系统,通过引入状态变量 ( x[k] ),可以建立一个更通用的系统模型:
[ x[k+1] = A x[k] + B u[k] ] [ y[k] = C x[k] + D u[k] ]
在这里,( A ), ( B ), ( C ), 和 ( D ) 分别是系统矩阵、输入矩阵、输出矩阵和直接传递矩阵。状态空间模型的优势在于能够清晰地展示系统状态的变化和系统的内部结构。
本章内容通过浅入深的介绍,为读者理解线性离散系统的基本概念与数学表示打下坚实的基础。随后章节将进一步探讨这些系统的关键属性和分析、优化方法。
2. 可控性与可观性的概念解释
2.1 可控性的理论基础
2.1.1 可控性的数学定义
可控性是指系统能否通过输入控制量来达到任意状态的能力。对于线性时不变系统,可控性的数学定义通常基于可控性矩阵。该矩阵由系统矩阵的系数构成,当且仅当可控性矩阵的秩等于系统的状态变量数目时,系统是完全可控的。
2.1.2 可控性矩阵与系统状态
可控性矩阵是由系统矩阵A和输入矩阵B组合而成的。在MATLAB中,可控性矩阵C可以通过以下形式表示:
C = ctrb(A, B);
这里, ctrb 函数用于计算可控性矩阵。在计算后,我们会检查矩阵C的秩,如果其秩与状态变量的数目相同,系统即被视为完全可控。
2.2 可观性的理论基础
2.2.1 可观性的数学定义
可观性是指系统内部状态是否能从输出序列中完全确定的能力。在数学上,可观性矩阵通常由系统矩阵A和输出矩阵C组合构成。如果这个矩阵的秩等于状态变量数目,那么系统是完全可观的。
2.2.2 观测矩阵与输出状态
可观性矩阵O可以通过以下方式在MATLAB中表示:
O = obsv(A, C);
这里, obsv 函数用于计算可观性矩阵。类似地,我们通过检查矩阵O的秩来判断系统的可观性。如果该秩等于状态变量数目,则认为系统是完全可观的。
在本章的后面部分,我们将进一步探讨如何使用MATLAB来测试和验证系统的可控性和可观性,并且将通过实际案例来展示这些概念的应用。在下一节中,我们会详细解释和展示如何在MATLAB环境中导入系统矩阵,并对其进行离散化处理,这是进行系统分析和设计的基础步骤。
3. MATLAB系统矩阵导入与离散化过程
在控制系统分析和设计中,MATLAB提供了强大的矩阵运算能力和便捷的工具箱,使得复杂系统的矩阵导入和离散化变得容易实现。本章节将深入探讨如何在MATLAB环境中导入系统矩阵以及进行系统的离散化处理。
3.1 系统矩阵的导入方法
3.1.1 利用MATLAB定义系统矩阵
在MATLAB中,系统矩阵通常可以使用基本的矩阵操作符和函数来定义。线性时不变系统(LTI)可以用其状态空间表示,即:
dx/dt = Ax + Bu
y = Cx + Du
其中, A 、 B 、 C 和 D 分别是系统矩阵、输入矩阵、输出矩阵和前馈矩阵。
在MATLAB中导入一个简单的系统矩阵的代码示例如下:
% 定义一个二阶系统的矩阵
A = [0 1; -2 -3];
B = [0; 1];
C = [1 0];
D = 0;
% 创建状态空间模型
sys = ss(A, B, C, D);
% 显示模型信息
disp(sys);
3.1.2 矩阵数据来源与格式转换
矩阵数据可以来源于多种渠道,如实验数据、理论推导或数值计算结果。导入这些数据时,可能需要进行格式转换以适应MATLAB的输入格式。常见的情况包括从文本文件或Excel表格中读取数据,然后导入到MATLAB中。
以下是一个从CSV文件导入数据并创建状态空间模型的代码示例:
% 从CSV文件读取矩阵数据
A_csv = csvread('system_matrix.csv', 0); % CSV文件中的数据从第二行第二列开始读取
B_csv = csvread('input_matrix.csv', 0);
C_csv = csvread('output_matrix.csv', 0);
D_csv = csvread('feedforward_matrix.csv', 0);
% 检查数据维度是否一致
if size(A_csv, 1) ~= size(B_csv, 1) || size(C_csv, 2) ~= size(A_csv, 2) || size(D_csv, 1) ~= size(B_csv, 2)
error('矩阵维度不匹配');
end
% 创建状态空间模型
sys_csv = ss(A_csv, B_csv, C_csv, D_csv);
% 显示模型信息
disp(sys_csv);
3.2 系统离散化技术
3.2.1 Z变换与离散化原理
系统离散化是指将连续时间系统转换为离散时间系统的过程。这在计算机控制或者数字信号处理中非常关键。Z变换是分析离散时间系统的主要工具。在MATLAB中,可以使用 c2d 函数将连续时间系统转换为离散时间系统。
3.2.2 MATLAB中的离散化函数应用
使用 c2d 函数离散化系统的代码示例如下:
% 定义采样周期
Ts = 0.1; % 采样周期为0.1秒
% 使用Zoh方法将连续时间模型转换为离散时间模型
sys_d = c2d(sys, Ts, 'zoh');
% 显示离散化后的模型信息
disp(sys_d);
在进行离散化操作时,需要注意采样周期的选择对系统性能的影响。MATLAB提供了多种离散化方法,包括零阶保持('zoh')、一阶保持('foh')和双线性变换('tustin')等,每种方法都有其适用场景和特点。
通过本章的介绍,我们了解了如何在MATLAB中导入系统矩阵,并对连续时间系统进行离散化处理。下一章节,我们将进一步探索如何在MATLAB中测试系统的控制性和可观性,并进行相应的评估。
4. 控制性与可观性测试及评估方法
在本章节中,我们将深入探讨如何利用MATLAB进行控制性(controllability)和可观性(observability)的测试和评估。理解系统能否通过输入控制其状态,以及能否通过输出了解系统内部状态,对于设计和实现有效的控制系统至关重要。
4.1 控制性测试流程
控制性测试是检查系统是否可以将所有可能的状态转移到任意状态,这是控制系统设计中的一个关键步骤。在MATLAB中,控制性测试可以通过一系列内置函数来完成。
4.1.1 MATLAB中可控性测试函数
MATLAB提供了 ctrb 函数来计算系统的可控性矩阵。这个矩阵的满秩性质可以用来判断系统的可控性。代码块4.1展示了如何计算可控性矩阵并进行测试。
A = [0 1; -2 -3]; % 系统矩阵
B = [0; 1]; % 输入矩阵
C = ctrb(A, B); % 计算可控性矩阵
if rank(C) == size(A, 1)
disp('系统是可控的');
else
disp('系统是不可控的');
end
通过执行这段代码,MATLAB会输出系统的可控性状态。如果可控性矩阵的秩等于状态矩阵的维度,系统是可控的。反之,如果秩小于状态矩阵的维度,系统是不可控的。
4.1.2 可控性测试结果的分析
在得到测试结果之后,需要对结果进行分析。如果系统不可控,可能需要采取措施如增加控制输入或改变系统结构来提高系统的可控性。例如,通过添加新的输入或者重新设计系统的控制策略。
可控性测试的深入分析通常涉及到系统的物理特性,例如电机控制、飞行器控制等领域,这些都需要结合具体的系统模型和控制目标进行分析。
4.2 可观性测试流程
可观性测试则关注于系统是否能够通过输出来确定系统内部的状态。这在设计观测器和状态估计器时非常关键。
4.2.1 MATLAB中可观性测试函数
MATLAB提供了 obsv 函数来计算系统的可观测矩阵。代码块4.2展示了如何利用这个函数进行可观性测试。
O = obsv(A, C); % 计算可观测矩阵
if rank(O) == size(A, 1)
disp('系统是可观测的');
else
disp('系统是不可观测的');
end
这段代码会输出系统是否是可观测的结论。如果可观测矩阵的秩等于状态矩阵的维度,则系统是可观测的。
4.2.2 可观性测试结果的分析
得到测试结果后,同样需要进行深入分析。如果系统是不可观测的,则需要设计一个观测器来估计系统的状态。这可能涉及到选择合适的观测器结构和增益,确保观测器的动态性能满足需求。
在工程应用中,可观性测试对于系统维护和故障诊断同样重要。例如,通过输出信号分析,可以及时发现系统内部潜在的问题,并采取预防措施。
本章节展示了通过MATLAB进行控制性与可观性测试的详细流程,以及结果的分析和应用。在后续章节中,我们将会进一步探讨如何利用这些测试结果进行系统的设计优化和性能提升。
5. 可视化工具在系统分析中的应用
系统分析作为工程和科学中的一个重要环节,它涉及到复杂的数据和信息处理,使得能够从不同的视角和维度了解系统的动态行为和结构特性。可视化工具为这一过程提供了直观的展示,极大地提高了分析效率和理解深度。在本章节中,我们将深入探讨可视化工具在系统分析中的应用,特别是通过MATLAB这一强大的数学计算和可视化平台,如何更好地理解和解析系统特性。
5.1 MATLAB的可视化基础
MATLAB不仅在数据处理和系统建模方面表现出色,其在数据可视化方面的功能同样强大。用户可以利用MATLAB提供的丰富函数和图形用户界面(GUI)来生成直观的图形和图表,这些图形能够清晰地表达数据和系统行为。
5.1.1 图形用户界面(GUI)功能
MATLAB提供了功能强大的图形用户界面工具,例如MATLAB App Designer和GUIDE等,这些工具允许用户设计出高度定制化的应用程序界面,使非专业编程用户也能够轻松创建交互式的图形界面。通过这些GUI工具,用户可以快速地访问常用功能,并实现数据的可视化展示。
5.1.2 二维与三维绘图技术
MATLAB的绘图功能是其可视化工具的核心。它允许用户创建二维和三维图形,这包括散点图、线图、柱状图、饼图、曲面图、等高线图等。对于动态系统的分析,MATLAB还支持动画的创建,这样用户可以观察到数据随时间变化的动态过程。通过设置不同的属性,如颜色、标记样式和图例,用户能够增强图形的表现力,从而得到更加精确和详细的信息。
5.2 系统分析的可视化展示
在系统的状态空间和动态响应分析中,可视化技术提供了一种直观的方法来理解系统的行为。对于状态空间模型,状态空间的图形表示可以让我们对系统的可控性和可观性有直观的认识。对于系统的动态响应,我们可以使用不同的可视化工具来分析系统对输入信号的反应。
5.2.1 状态空间的图形表示
状态空间模型是动态系统分析中的重要工具,它通过一系列的一阶微分方程来描述系统的动态行为。MATLAB提供了多种方法来可视化状态空间模型,最直接的方法是使用 plot 函数来绘制状态变量随时间变化的图形。对于状态变量的二维相图,可以使用 plot 函数或 quiver 函数(对于向量场)来展示。而三维图形则可以使用 plot3 或 meshgrid 与 surf 函数组合来绘制,这些可以更直观地展示状态变量之间的关系。
5.2.2 动态响应的可视化分析
动态响应是指系统在受到外部激励(输入信号)后随时间变化的输出响应。在MATLAB中, impulse 和 step 函数被广泛用于绘制系统的冲击响应和阶跃响应。对于更复杂的情况,如频率响应, bode 、 nyquist 和 Nichols 图提供了频率域内系统特性的直观展示。这些图形不仅能够帮助我们判断系统的稳定性,还能够分析系统的动态性能。
为了更好地说明MATLAB在系统分析可视化中的应用,我们将通过一个简单示例来展示状态空间模型的可视化过程。
% 定义一个简单的二维状态空间模型
A = [0 1; -2 -3];
B = [0; 1];
C = [1 0];
D = 0;
% 创建状态空间对象
sys = ss(A, B, C, D);
% 计算并绘制系统的特征值
eig_val = eig(A);
figure;
plot(real(eig_val), imag(eig_val), 'ro');
title('特征值位置图');
xlabel('实部');
ylabel('虚部');
grid on;
% 计算并绘制状态变量的时间响应
figure;
step(sys);
title('系统阶跃响应');
xlabel('时间');
ylabel('输出');
grid on;
在上述代码中,我们首先定义了一个简单的二维状态空间模型,并利用MATLAB的 ss 函数创建了状态空间对象。接着,我们使用 eig 函数来计算系统矩阵 A 的特征值,并在特征值位置图中展示出来。这有助于我们分析系统的稳定性,因为稳定系统的特征值应当位于复平面的左半部分。
此外,我们还使用了 step 函数来计算并绘制了系统的阶跃响应。通过观察输出响应的图形,我们可以直观地看到系统对于阶跃输入的反应。
这些可视化工具和图形极大地增强了系统分析的直观性和效率。通过使用MATLAB,工程师和研究人员可以快速地评估和分析系统的特性,为控制系统的优化和设计提供有力支持。
6. 状态反馈控制与极点配置的设计优化
6.1 状态反馈控制基础
在控制系统理论中,状态反馈控制是一种常见的控制策略,旨在通过测量系统的状态变量并利用这些信息来设计反馈控制律,以实现期望的系统性能。状态反馈控制系统的原理主要基于系统的状态方程,该方程描述了系统状态变量的动态变化。
6.1.1 反馈控制系统的原理
反馈控制系统由被控对象、反馈环节、比较环节和控制器组成。在状态反馈控制系统中,比较环节将系统输出与期望输出(参考输入)进行比较,并生成误差信号。控制器接收此误差信号并结合系统状态信息,生成控制输入,以调整系统的动态行为。
状态反馈控制的关键在于选择合适的反馈矩阵K,使得闭环系统具有期望的性能特性,例如稳定性、快速响应和良好的抗干扰能力。设计状态反馈的关键步骤通常包括:
- 确定系统的状态方程。
- 计算系统的可控性矩阵。
- 选择合适的极点配置。
- 确定状态反馈增益矩阵K。
6.1.2 MATLAB中的状态反馈设计
MATLAB提供了强大的工具箱来设计和分析状态反馈控制系统。在MATLAB中,可以使用 place 函数来实现极点配置,并计算出相应的状态反馈增益矩阵K。
下面是一个简单的示例代码,展示如何使用MATLAB来设计状态反馈控制系统:
% 定义系统矩阵A和B
A = [0 1; -2 -3];
B = [0; 1];
% 定义期望的闭环极点位置
desired_poles = [-1, -2];
% 使用place函数计算状态反馈增益矩阵K
K = place(A, B, desired_poles);
% 显示计算结果
disp('状态反馈增益矩阵K为:');
disp(K);
在上述代码中,我们首先定义了一个二阶系统的矩阵 A 和 B 。然后,我们指定了我们期望闭环极点的位置,并使用 place 函数计算出状态反馈增益矩阵 K 。计算结果将显示在MATLAB的命令窗口中。
6.2 极点配置与系统性能
极点配置是控制工程中一个重要的设计工具,用于调整闭环系统的动态特性。极点配置理论的基础在于闭环极点位置直接影响系统的稳定性和动态性能。
6.2.1 极点配置理论概述
在开环系统中,系统的极点是由系统矩阵A的特征值决定的。对于闭环系统,系统矩阵变为 A - BK ,其中 K 是状态反馈增益矩阵。通过合理配置闭环极点,可以实现对系统性能的优化,包括提高系统稳定性和改善瞬态响应。
6.2.2 MATLAB在极点配置中的应用
MATLAB提供了一系列函数用于极点配置和状态反馈设计,其中 place 函数是最常用的一个。 place 函数不仅可以实现极点配置,还可以直接计算出实现该配置的状态反馈增益矩阵。
除了 place 函数,MATLAB的控制系统工具箱还提供了其他一些函数,例如 acker 和 lqr ,用于实现不同的极点配置策略和状态反馈控制设计。
极点配置设计实例
为了进一步说明极点配置的过程,假设我们需要为一个简单的线性系统配置极点。我们将通过MATLAB的 place 函数来实现。
% 定义系统矩阵A和B
A = [0 1; -3 -2];
B = [0; 1];
% 定义期望的闭环极点位置
desired_poles = [-1+i, -1-i];
% 使用place函数计算状态反馈增益矩阵K
K = place(A, B, desired_poles);
% 显示计算结果
disp('状态反馈增益矩阵K为:');
disp(K);
% 计算闭环系统矩阵
A_cl = A - B*K;
% 验证闭环极点位置
actual_poles = eig(A_cl);
disp('闭环系统的极点为:');
disp(actual_poles);
在这个示例中,我们首先定义了一个系统的矩阵 A 和 B ,并指定了期望的闭环极点位置。然后,我们使用 place 函数计算出了状态反馈增益矩阵 K ,并通过 eig 函数验证了实际的闭环极点位置是否符合我们的设计要求。
通过上述步骤,我们不仅可以设计出满足性能要求的控制系统,还可以通过调整 desired_poles 变量来探索不同极点配置对系统动态性能的影响。
简介:线性离散系统是自动控制和信号处理的关键,而MATLAB提供了一个强大的平台来进行这些系统的可控性与可观性分析。本文将介绍如何利用MATLAB对线性离散系统进行可控性与可观性的概念定义、矩阵计算和可视化分析,并通过实例演示如何使用MATLAB内置函数实现系统分析、测试和优化。















 1885
1885

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









