






 本文介绍了如何在示教器重定位下,使用PS软件进行机器人爪手的安装与卸载操作。通过创建坐标、添加Mount和UnMount指令,详细阐述了从Home点出发,经Pick点装载爪手,抬高工具到p2点,再到Place点卸载工具,最终返回Home点的完整流程。
本文介绍了如何在示教器重定位下,使用PS软件进行机器人爪手的安装与卸载操作。通过创建坐标、添加Mount和UnMount指令,详细阐述了从Home点出发,经Pick点装载爪手,抬高工具到p2点,再到Place点卸载工具,最终返回Home点的完整流程。
快换类型的工具应用很多,在项目中一台机器人可能既要进行取放工作,还要进行焊接工作,需要在焊枪和爪手直接切换,在PS软件中我们将使用Mount和UnMount指令来实现工具的安装与卸载,下面进行详细操作步骤讲解:
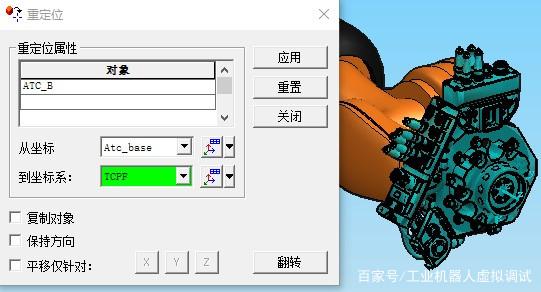
1、在进行安装之前,我们需要在Atc和爪手上分别创建base坐标和tcp坐标。下面先将Atc安装到机器人第六轴法兰。选择Atc打开重定位对话框,然后选择Atc的Atc_base坐标和机器人的TCPF坐标,点击应用,如下图所示;
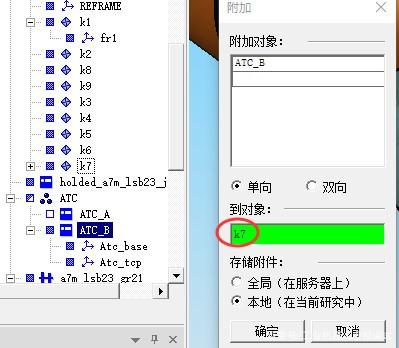
2、完成以上操作后将Atc附加到机器人第六轴k7上面,如下图所示;
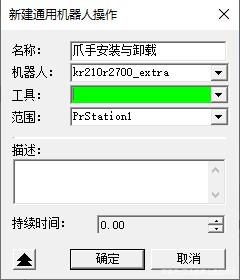
3、新建机器人通用程序,名称为爪手安装与卸载,工具一项不选择,如下图所示,确定;
4、机器人当前位置(原点位置)添加3个点,两个点作为Home点,另一个点via13利用重定位命令将其移动到爪手base坐标位置,如下图所示;
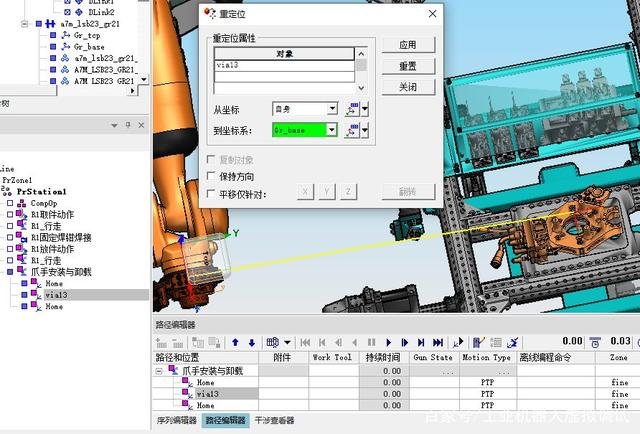
5、移动完成后将via13复制一个,然后重新命名为pick和place,即爪手的安装与卸载位置,见下图;
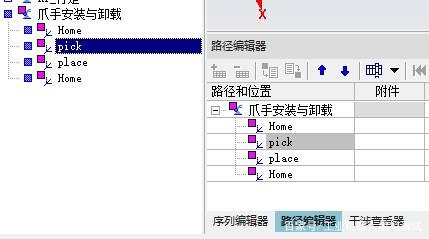
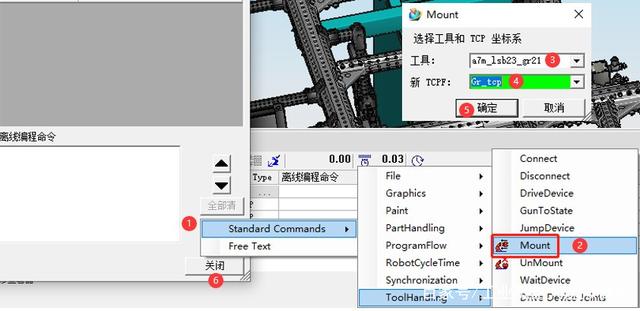
6、选择pick点,然后右键打开示教器对话框,添加爪手安装指令;

7、在示教器对话框中,点击右下角的添加,展开命令栏选择Mount安装工具,弹出Mount对话框,选择爪手和爪手Tcp,确定;
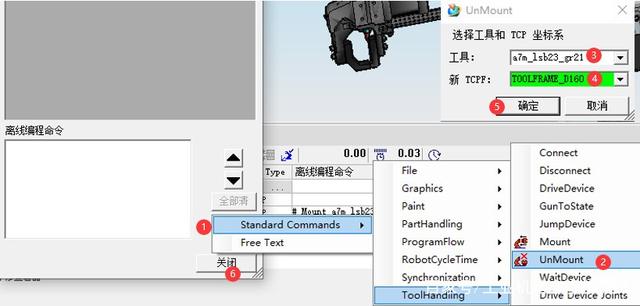
8、选择place点,重复上述步骤,点击右下角的添加,展开命令栏选择UnMount卸载工具,弹出UnMount对话框,选择爪手和机器人Tcp,确定;
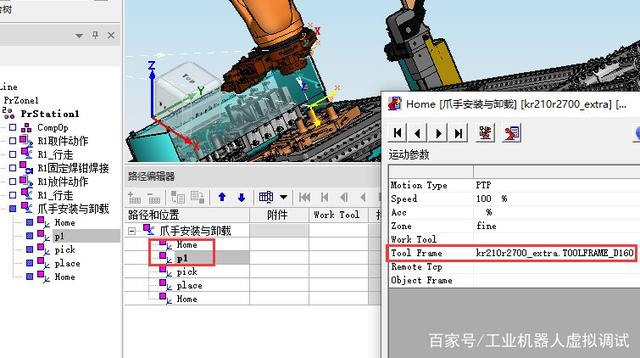
9、将机器人跳转到pick点,然后在pick点前插入一个过度点p1,打开示教器对话框将Home和P1的工具坐标Tool Frame全部改为机器人的tool坐标;
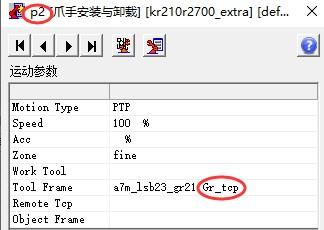
10、将机器人跳转到pick点,然后在pick点后插入一个过度点p2,打开示教器对话框将P2的工具坐标Tool Frame改为爪手的工具坐标Gr_tcp;
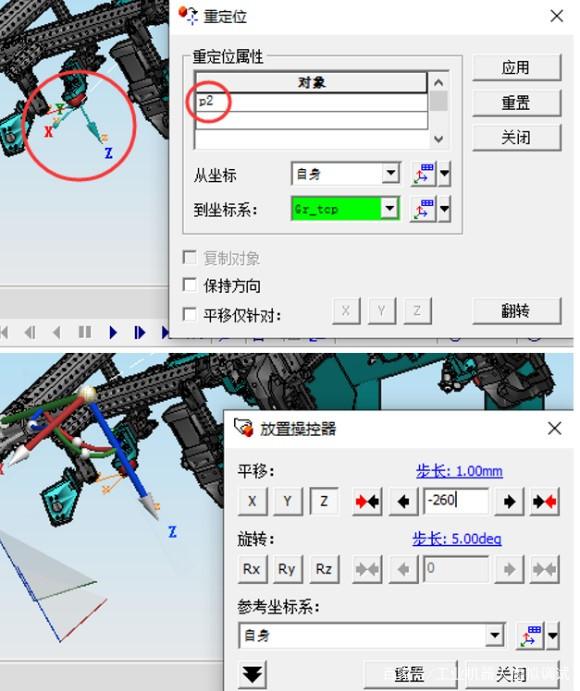
11、选择p2点,利用重定位功能将p2点移动到爪手tcp位置,然后通过放置操控命令将p2点沿z向移动-500(即将爪手抬高500);
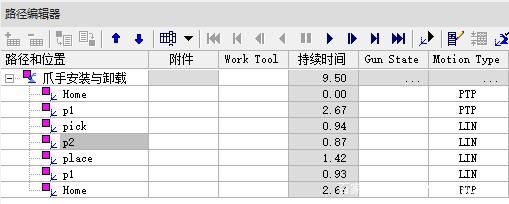
12、选择place点,右键打开示教器对话框将工具坐标Tool Frame改为爪手的工具坐标Gr_tcp,然后将机器人跳转到pick点,利用重定位功能将place点移动到爪手tcp位置,复制p1点到place后面,完成后如下图。机器人的动作流程为:机器人从Home出发到达Pick点装载工具,然后将工具抬高500到p2点,最后到place点卸载工具,回到Home点位置;
13、需设置每个点的工具坐标,Home、p1点的工具坐标为机器人工具坐标,p2、pick和place点的工具坐标为爪手工具坐标。即爪手安装到机器人之后,所有的点工具坐标切换为爪手工具坐标,未安装之前或者卸载后为机器人工具坐标。

















 1546
1546

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









