








DELMIA软件不仅能够对机器人焊点坐标进行导入操作,它也能够实现对机器人焊点坐标的导出操作。本期就来为大家介绍一下DELMIA软件机器人焊点坐标数据的导出。
01与机器人焊点坐标数据导入一样,DELMIA软件机器人焊点坐标数据的导出也是在机器人离线编程模块中进行的。软件中依次点击“开始”→“资源详细信息”,然后选择“Robot Offline Programming”,如下图所示,将软件切换到机器人离线编程模块。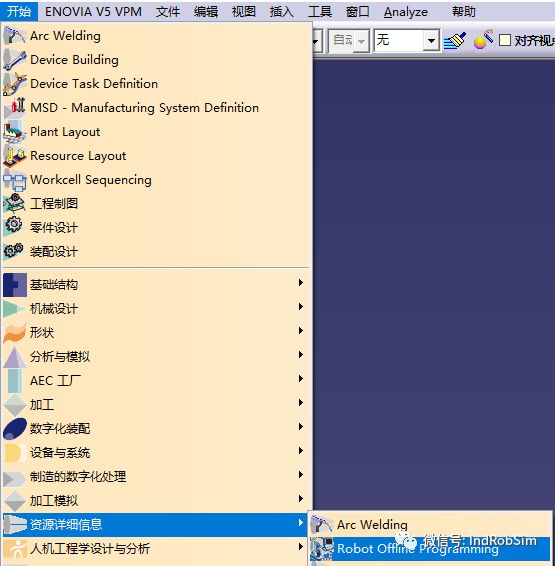
说明:前几期讲述机器人焊点坐标导入时选择的导入数据参考是焊接板件Work,也就是以车身坐标为参考,这里在对机器人焊点坐标导出时我们仍然希望以车身坐标为参考进行坐标数据的导出,这样才能保证在机器人位置发生变化时再次倒入的机器人焊点坐标位置不会发生变化。因此,这里我们需要插入一个机器人并将其位置移动到车身坐标原点处,作为焊点坐标导出参考。
” 02左侧工具条中点击“Catalog Browser”
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章
















 5823
5823











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









