






 本文介绍了传感器的基本概念、特点及其在机器人中的作用。重点讲解了超声波测距的回声探测法,激光雷达的脉冲法、相位法和三角反射法,以及相机测距的单目、双目和深度相机的工作原理。各种测距传感器各有优缺点,适用于不同的应用场景。
本文介绍了传感器的基本概念、特点及其在机器人中的作用。重点讲解了超声波测距的回声探测法,激光雷达的脉冲法、相位法和三角反射法,以及相机测距的单目、双目和深度相机的工作原理。各种测距传感器各有优缺点,适用于不同的应用场景。
什么是传感器?
传感器(英文名称:transducer/sensor)是一种检测装置,能感受到被测量的信息,并能将感受到的信息,按一定规律变换成为电信号或其他所需形式的信息输出,以满足信息的传输、处理、存储、显示、记录和控制等要求。
传感器有什么特点?
传感器的特点包括:微型化、数字化、智能化、多功能化、系统化、网络化。它是实现自动检测和自动控制的首要环节。
传感器有什么用?
传感器的存在和发展,让机器人有了触觉、视觉等感官,让机器人慢慢变得鲜活了起来。通常根据其基本感知功能分为热敏元件、光敏元件、气敏元件、力敏元件、磁敏元件、湿敏元件、声敏元件、放射线敏感元件、色敏元件和味敏元件等十大类。

常用于测距的传感器种类
1. 超声波测距

超声波是一种频率高于20000赫兹的声波,它的方向性好,穿透能力强,易于获得较集中的声能,在水中传播距离远。
超声波测距原理:
最常用的超声测距的方法是回声探测法,超声波发射器向某一方向发射超声波,在发射时刻的同时计数器开始计时,超声波在空气中传播,途中碰到障碍物面阻挡就立即反射回来,超声波接收器收到反射回的超声波就立即停止计时。超声波在空气中的传播速度为340m/s,根据计时器记录的时间t,就可以计算出发射点距障碍物面的距离s,即:s=340t/2。
2. 激光雷达测距

激光测距粗划分为两种,第一种原理大致是光速和往返时间的乘积的一半,就是测距仪和被测量物体之间的距离,以激光测距仪为例;第二种是以激光位移传感器原理为原理的方法的。
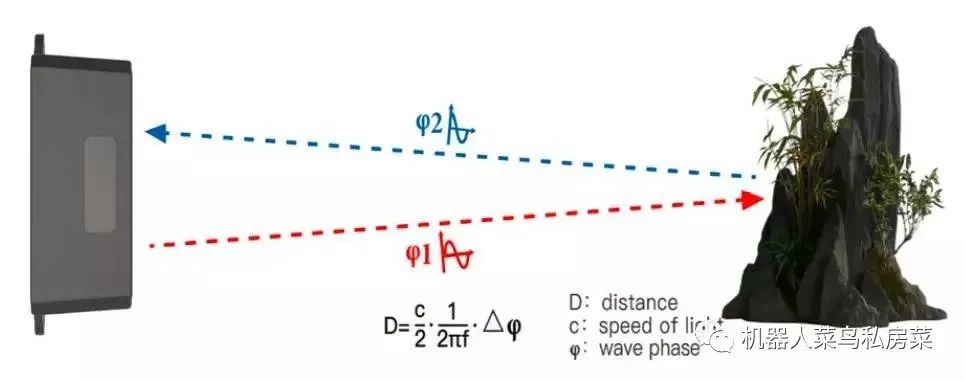
激光的测量方法大致有三种:脉冲法、相位法、三角反射法。脉冲法测量距离的精度一般是在+/- 1米左右。另外,此类测距仪的测量盲区一般是15米左右。三角法用来测量2000mm以下短程距离(行业称之为位移)时,精度最高可达1um。相位式激光测距一般应用在精密测距中,精度一般为毫米级。激光回波分析法则用于远距离测量。
精度与超声波比较高很多,相对的价格也是比较贵的。
3. 相机测距
相机按工作方式分类
单目相机(Monocular)、双目相机(Stereo)、深度相机(RGB-D)以一定速率拍摄周围的环境,形成一个连续的视频流。普通相机能以每秒钟30秒张图片的速度采集图像,高速相机则更快一些。深度相机(RGB-D)原理较复杂,除了能够采集彩色图像之外,还能读出每个像素离相机的距离。
单目相机

结构简单,成本低。本质上是拍照时的场景,在相机的成像平面上留下一个投影。以二维的形式反映三维的世界。
双目相机

双目相机由两个单目相机组成,但这两个相机之间的距离(称为基线)是已知的。我们通过这个基线来估计每个像素的空间位置,基线距离越大,能够测量到的就越远,双目与多目的缺点是配置与标定均较为复杂,其深度量程和精度受双目的基线与分辨率的限制,而且视觉计算非常消耗计算资源,需要使用GPU和FPGA设备加速后,才能实时输出整张图像的距离信息。因此在现有的条件下,计算量是双目的主要问题之一。
深度相机

深度相机又称RGB-D相机,它最大的特点是可以通过红外结构光或Time-of-Flight(ToF)原理,像激光传感器那样,通过主动像物体发射光并接收返回的光,测出物体离相机的距离。
目前常用的RGB-D相机还存在测量范围窄、噪声大、视野小、易受日光干扰、无法测量透射材质等诸多问题。
超声波、激光雷达、相机作为常用测距传感器,各有利弊。用户需要根据不同场景选型适配的产品,有时甚至需要考虑多种传感器融合,才能满足当下的需求。

















 7417
7417

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









