






Modbus RTU(Remote Terminal Unit)是一种在工业领域广泛使用的串行通信协议。它支持通过串行连接进行远程设备间的通讯,以实现数据交换。本教程旨在提供深入的理解和实际操作指南,帮助读者掌握Modbus RTU的基础知识及其在实际中的应用。
第1部分:Modbus RTU 协议概述
什么是Modbus RTU协议
Modbus RTU是一种基于串行通信的协议,用于连接电子设备。最初由Modicon公司在1979年为其PLC(可编程逻辑控制器)开发,现已成为工业领域的一个事实标准。
Modbus RTU的特点
简单性:易于理解和实现。
开放性:作为一个公开的协议,有详细的文档和大量的支持资源。
灵活性:能够在各种不同的硬件平台和网络上运行。
工作原理
Modbus RTU通信主要基于一个主/从模式,其中一个设备充当主设备(或称为Master),负责发起请求;其他设备作为从设备(或称为Slave),响应主设备的请求。
第2部分:硬件和软件要求
硬件要求
至少两个支持RS-485或RS-232通信的设备。
一个或多个支持Modbus RTU协议的设备(例如,传感器、仪表、PLCs等)。
转换器(如果需要将RS-232转换为RS-485)。
软件要求
一个可以发送Modbus命令并解析响应的软件程序。
对于开发和调试,可能还需要Modbus模拟器和分析器工具。
第3部分:Modbus RTU数据结构
数据帧格式
Modbus RTU的数据帧包括:
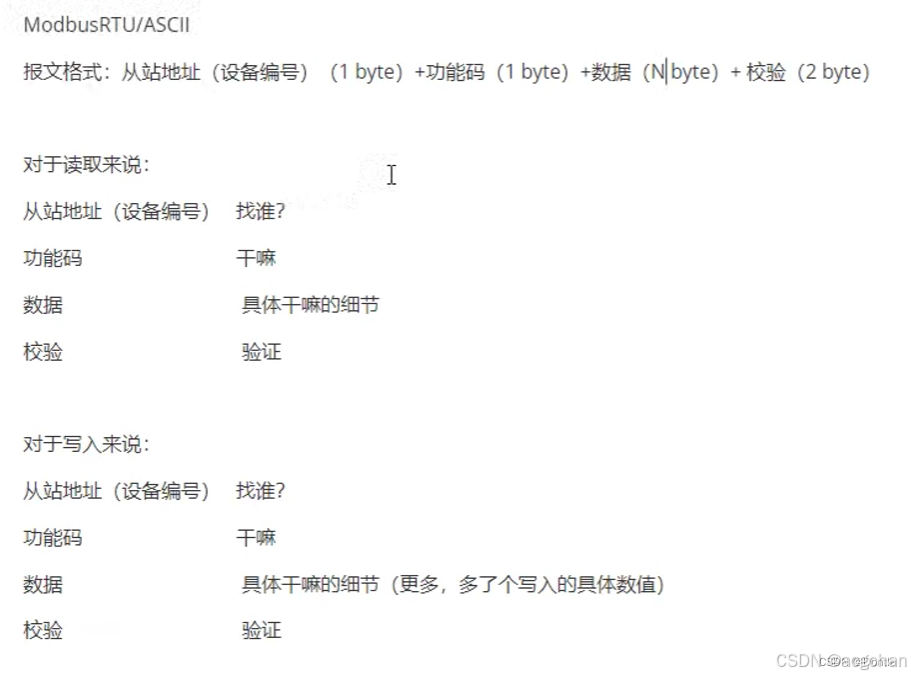
组成
设备地址(从站地址/设备编号)
功能码
数据(包括起始寄存器和寄存器长度)
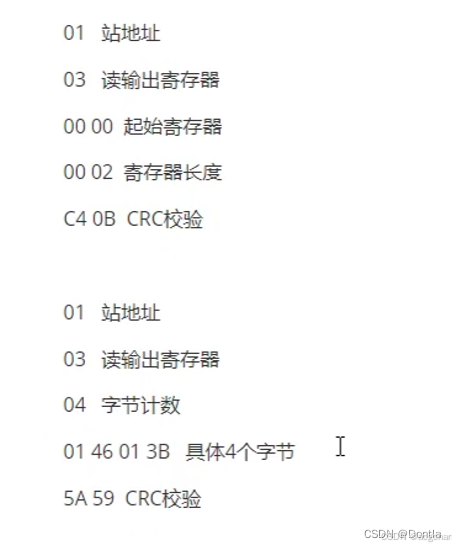
例如,读取地址40108 2个寄存器的数据,起始寄存器就填0x00 0x6B(107),数量填0x00 0x02:

请求与返回数据解析:

寄存器类型
在Modbus RTU协议中,数据存储在不同类型的寄存器中。每种类型的寄存器都有其特定的用途和地址范围。以下是四种主要的Modbus寄存器及其通常的数据存储范围:
1. 线圈寄存器(Coil Register)(输出线圈)bool、00001 - 09999、可读可写
用途:用于读取和写入单个位的值,通常代表开/关状态。
地址范围:00001 - 09999。
访问类型:可读可写。
线圈寄存器通常用于控制一个设备的继电器、开关等二进制设备。
2. 离散输入寄存器(Discrete Input Register)(输入线圈)bool、10001 - 19999、只读
用途:用于只读单个位的值,通常代表外部设备的状态。
地址范围:10001 - 19999。
访问类型:只读。
离散输入寄存器常用来读取传感器或其他输入设备的二进制状态,例如门是否关闭、按钮是否被按下。
3. 输入寄存器(Input Register)16位值、30001 - 39999、只读
用途:用于只读存储模拟输入如温度、压力等的16位值。
地址范围:30001 - 39999。
访问类型:只读。
输入寄存器常用于保存模拟信号转换后的数字值,例如来自4-20mA或0-10V传感器的输入。
4. 保持寄存器(Holding Register)(输出寄存器)16位值、40001 - 49999、可读可写
用途:用于读写存储模拟输出或可变参数的16位值。
地址范围:40001 - 49999。
访问类型:可读可写。
保持寄存器用于存储可以由Modbus主设备修改的参数,或者存储模拟输出值,比如设置给可调速驱动器的目标速度。
注意事项
请注意,实际使用时,并非所有的地址都会被使用,且某些设备可能支持扩展的地址范围。这些寄存器的地址范围通常指的是Modbus协议内部的逻辑地址,而实际在设备上的映射可能需要减去一个偏移量(例如,第一个线圈寄存器的地址可能为0而不是1)。在进行Modbus通信时,确保使用正确的地址至关重要,因为错误的地址可能导致通信失败或操作错误的设备。
最后,应当参考特定设备的文档来确定实际可用的地址范围和寄存器功能,因为不同设备厂商可能会有自己的实现方式和约定。
功能码
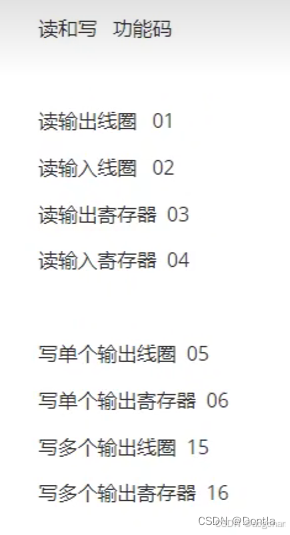
以上功能码,基本是由相应读写操作排列组合而来,参考文章:这节课带你吃透Modbus通信协议 13:00
在Modbus协议中,功能码用来指定主设备想要执行的动作。这些功能码可以是读取或写入一个或多个连续寄存器的值,也可以是对线圈进行操作。以下是一些最常用的Modbus功能码及其解释:
对于线圈(Coil)的操作
01 (0x01) 读取线圈状态(Read Coil Status)
用于读取一个或多个线圈的当前状态(ON/OFF)。
05 (0x05) 写单个线圈(Write Single Coil)
用于设置单个线圈的状态为ON或OFF。
15 (0x0F) 写多个线圈(Write Multiple Coils)
用于设置一组线圈的状态。
对于离散输入(Discrete Input)的操作
02 (0x02) 读取离散输入状态(Read Discrete Inputs)
用于读取一个或多个离散输入的状态。
对于保持寄存器(Holding Register)的操作
03 (0x03) 读取保持寄存器(Read Holding Registers)
用于读取一个或多个保持寄存器的内容。
06 (0x06) 写单个保持寄存器(Write Single Register)
用于写入单个保持寄存器的值。
16 (0x10) 写多个保持寄存器(Write Multiple Registers)
用于写入一组保持寄存器的值。
对于输入寄存器(Input Register)的操作
04 (0x04) 读输入寄存器(Read Input Registers)
用于读取一个或多个输入寄存器的内容。
其他常见功能码
07 (0x07) 读异常状态(Read Exception Status)
用于在串行诊断功能中读取输出线圈组的状态。
08 (0x08) 诊断(Diagnostic)
用于执行通信系统诊断。
11 (0x0B) / 12 (0x0C) 获取从站ID(Get Com Event Counter / Get Com Event Log)
用于获取特定事件的计数器和日志。
17 (0x11) 报告从站ID(Report Slave ID)
用于读取从站的唯一标识符和其他相关信息。
22 (0x16) 屏蔽写寄存器(Mask Write Register)
用于修改保持寄存器的内容,但是只改变指定的位。
23 (0x17) 读/写多个寄存器(Read/Write Multiple Registers)
用于同时读取和写入一系列的保持寄存器。
总结
这些功能码是实现Modbus RTU或TCP协议数据交换的基础,了解每个功能码的具体作用对于理解和使用Modbus协议至关重要。在应用程序或设备固件中实现Modbus时,通常会根据实际需要选择支持哪些功能码。
第4部分:设置Modbus RTU网络
连接设备
描述如何使用RS-485或RS-232将设备物理连接起来,包括连线图和相关注意事项。
我们以RS-485连接为例。
RS-485是一种差分式串行通信标准,广泛用于实现Modbus RTU网络中的多点通信。要使用RS-485物理连接设备,需遵循以下步骤:
设备选择
确保所有要连接的设备支持RS-485接口,包括主控制器(Master)和从设备(Slaves)。
线缆选择
RS-485通常使用双绞线来传输数据。为了减少噪声干扰,应使用屏蔽双绞线(Shielded Twisted Pair, STP)。
连接方式
RS-485通信采用2线半双工方式,通常称为A和B或“+”和“-”。在连接时,需要将所有设备上的相同标记的端子相连:所有A端连到一起,所有B端也连到一起。正确的线对连接至关重要,否则可能导致通信故障。
终端电阻
在总线的两端加入120欧姆的终端电阻,可以减少反射引起的信号失真,特别是在长距离或高速率传输时。这些终端电阻应与总线的特性阻抗匹配。
接地
为了减少电气噪声和潜在的接地环问题,RS-485网络的屏蔽层应该在单一点接地。
网络长度和设备数量限制
RS-485允许的最大网络长度和设备数量取决于波特率、电缆类型以及其他因素。在较低的波特率下,RS-485通信可以达到1公里以上的距离。
实际连接示例
假设有一个Modbus RTU系统,包含1个主设备和3个从设备。物理连接将遵循如下方式:
Master ----A/B---- Slave 1 ----A/B---- Slave 2 ----A/B---- Slave 3
其中,A/B表示通过双绞线连接的RS-485的两个数据线。“----”表示物理连线,并且在Slave 3末端以及Master的另一端放置120欧姆的终端电阻。
请注意,在设置Modbus RTU网络时,必须仔细检查所有硬件和软件配置以确保网络可靠运行。根据实际的设备和环境,可能还需要考虑额外的电气保护措施,如浪涌保护和隔离器等。
配置参数
设置Modbus RTU网络时,波特率、数据位、停止位和奇偶校验都是关键参数,它们需要在所有设备上保持一致以确保正确的通信。以下是这些参数的常见设置:
波特率(Baud Rate)
波特率决定了数据传输的速度,单位是比特每秒(bps)。在Modbus RTU网络中,常见的波特率有9600、19200、38400、57600 和 115200。选择波特率时要考虑网络长度和噪声水平:波特率越高,对信号质量的要求就越高;同时,较高的波特率可能不适用于较长的总线长度。
波特率原理具体参考文章:波特率是什么?(Baudrate)波特率的底层原理(以RS-232通信为例)(每秒钟传输的符号(signal events 或 pulses)数量)
数据位(Data Bits)
数据位表示每个数据包中用于承载信息的位数。在Modbus RTU中,通常使用8个数据位。停止位(Stop Bits)
停止位标志着一个数据包的结束。可以设置1个或2个停止位,但在Modbus RTU网络中,最常见的设置是1个停止位。奇偶校验(Parity)
奇偶校验是一种错误检测机制,用来确认数据是否在传输过程中被破坏。Modbus RTU支持以下三种奇偶校验模式:无校验(None):不进行奇偶校验。如果选择无校验,则通常会设置2个停止位来增加数据的可靠性。
偶校验(Even):确保每个数据字节中1的数量为偶数。
奇校验(Odd):确保每个数据字节中1的数量为奇数。
选择哪种奇偶校验取决于你的设备和应用需求。在有些系统中,为了避免可能的通信错误,会优先使用奇校验或偶校验。在其他情况下,可能会选择无校验,尤其是在误码率非常低的环境中。
在设置Modbus RTU网络时,请务必参考你的设备手册或技术规范,因为不同的设备厂商可能有特定的配置要求。所有网络上的设备必须使用相同的配置,包括主站(Master)和从站(Slave),否则可能导致通信失败。此外,在设置网络之前,测试不同配置的性能也是一个好主意,以确定最佳的参数组合。
地址分配
在Modbus RTU网络中,每个从站设备(Slave Device)都必须有一个唯一的地址,以便主站(Master)能够通过该地址与特定的从站进行通信。以下是分配和管理Modbus设备地址的一些指导原则:
地址范围
Modbus协议定义了从1到247的有效地址用于从站。地址0是广播地址,所有从站都会接收广播消息,但不会回复。
地址248到255通常被保留供特殊功能使用。
分配地址
确保每个从站都被分配了一个独一无二的地址。没有两个设备应当共享相同的地址,否则会导致冲突和通信失败。
通常建议按物理位置或逻辑功能对从站进行编号,以便更容易地识别和管理。
管理地址
在安装新设备时记录下它的Modbus地址,并将这些信息维护在系统文档中。
对于需要频繁添加或移除设备的系统,考虑使用动态地址分配机制,或者实现一个地址管理策略以避免地址冲突。
在网络设计初期就规划地址空间,预留一定范围的地址用于未来扩展。
设置地址
地址可以通过设备上的拨码开关、跳线帽、软件配置工具或者设备控制面板来设置。确保在设备投入运行前正确设置地址。
如果设备支持软件配置,可能需要通过串行连接或其他通信接口来设置地址。
测试和验证
在网络完全投入运行之前,测试每个从站以确认其地址设置正确并且能够响应主站的查询。
验证网络中没有地址冲突,即没有两个从站使用相同的地址。
维护和更新
当网络发生变化时(例如,添加或替换设备),及时更新文档以反映地址分配的最新情况。
如果从站地址需要更改,确保更新所有相关的系统配置和文档。
Modbus RTU网络从站设备地址分配文档示例
# Modbus RTU 网络设备地址分配
本文档记录了截至 [填写日期] 的Modbus RTU网络中所有从站设备的地址分配情况。
## 网络概述
- 主站(Master): 1台
- 从站(Slaves): 总计5台
- 通信协议: Modbus RTU
- 物理层接口: RS-485
- 波特率: 19200 bps
- 数据位: 8 bits
- 停止位: 1 bit
- 校验位: None (无校验)
## 从站设备列表
| 设备编号 | Modbus 地址 | 设备类型 | 描述 | 位置 |
|----------|--------------|-----------------|--------------------|------------|
| 01 | 2 | 温度传感器 | 仓库温度监控 | 仓库区域A |
| 02 | 3 | 湿度传感器 | 仓库湿度监控 | 仓库区域B |
| 03 | 4 | PLC控制器 | 生产线控制 | 生产车间1 |
| 04 | 5 | 变频驱动器 | 电机速度调节 | 生产车间2 |
| 05 | 6 | 流量计 | 液体流量测量 | 加工区域 |
## 备注
- 所有设备地址均已按照实际应用场景进行设置,并确保无地址冲突。
- 系统将定期检查并更新设备地址分配情况,以反映任何新增或更改的设备信息。
- 本文档仅供内部使用,未经许可不得外泄。
## 文档管理
- 负责人: [填写负责人姓名]
- 审核人: [填写审核人姓名]
- 最近更新日期: [填写最新更新日期]
## 版本记录
| 版本号 | 修改日期 | 修改内容 | 修改人 |
|--------|--------------|----------------------------|------------------|
| 1.0 | YYYY-MM-DD | 初始版本,添加了5个从站设备的地址分配信息 | [填写修改人姓名] |
| 1.1 | YYYY-MM-DD | 更新了设备03的描述信息 | [填写修改人姓名] |
| ... | ... | ... | ... |
---
**注意:** 这只是一个示例文档,具体格式和内容可以根据实际需求进行调整和补充。
总结
通过遵循这些指导原则,可以有效地分配和管理Modbus RTU网络中的设备地址,确保通信的可靠性和系统的稳定性。此外,良好的文档记录和清晰的地址分配计划可以在排错和维护过程中节省大量时间。
第5部分:实施Modbus RTU通信
发送请求(构建Modbus RTU请求数据包)
在构建一个Modbus RTU请求数据包时,需要遵循Modbus协议规范,构建数据帧,并通过串行通信端口发送这个数据帧到网络上的从设备。
以下是构建Modbus RTU请求数据包的基本步骤:
1. 确定功能码和数据
选择合适的功能码,比如读取寄存器(0x03),写单个寄存器(0x06),写多个寄存器(0x10),等等。
根据所选功能码准备数据字段,例如起始地址、寄存器数量、数据值等。
2. 构建请求帧
设备地址:每个Modbus从设备都有唯一的地址,通常是一个8位的数值。
功能码:标识你想要执行的操作,如读取或写入。
数据域:包含与功能码相关的额外信息,如寄存器地址、寄存器数量、值等。
校验码:通常使用CRC-16(循环冗余检查)算法来生成校验码。
3. 发送请求帧
将请求帧通过RS-232、RS-485或其他支持Modbus RTU的串行通信接口发送给从设备。
4. 接收响应
发送请求后,监听串行端口以接收从设备的响应。
验证响应数据的CRC校验是否正确,确保数据完整性。
下面是一个简化的Python代码示例,说明如何使用pyModbus库构建并发送Modbus RTU请求:
from pymodbus.client.sync import ModbusSerialClient as ModbusClient
from pymodbus.exceptions import ConnectionException
# 初始化串行Modbus客户端
client = ModbusClient(method='rtu', port='/dev/ttyUSB0', timeout=1, baudrate=9600)
try:
# 建立连接
connection = client.connect()
if connection:
# 发送读取寄存器的请求,设备地址为1,起始地址为0,长度为10
response = client.read_holding_registers(address=0, count=10, unit=1)
# 检查是否收到有效的响应
if not response.isError():
print("Register values:", response.registers)
else:
print("Error reading registers")
except ConnectionException as e:
print("Connection error:", e)
finally:
# 关闭连接
client.close()
在此示例中,/dev/ttyUSB0表示串行端口的名称,这可能会根据你的操作系统和硬件配置而不同。你需要替换成实际连接到从设备的串行端口。
请注意,真实的应用程序可能需要更复杂的错误处理和异常管理策略。此外,这里提供的是一个非常基本的例子,根据你的需求,可能需要进行调整和优化。
接收响应
描述如何接收从设备的响应,并且对数据进行解析。(见上)
错误处理
在Modbus RTU通信中,可能会遇到多种错误情况。这些错误可以分为几个类别,包括物理层问题、配置错误、设备故障和数据解析错误。下面是一些常见的错误情况以及诊断和解决这些问题的方法:
1. 物理连接问题
症状:完全没有响应,或者通信非常不稳定。
诊断:
检查所有的物理连接,包括电缆、接头和终端电阻是否正确安装。
使用多米特表(万用表)检测串行接口上的电压和信号。
解决方法:
确保所有连接都牢固且无腐蚀。
如果使用RS-485,确保网络上有适当的终端电阻。
2. 配置错误
症状:通信失败或数据不正确。
诊断:
检查波特率、数据位、停止位和奇偶校验设置是否与从设备匹配。
确认设备地址是否正确。
解决方法:
调整串行通信设置以匹配从设备的要求。
修改软件配置以使用正确的设备地址。
3. 超时错误
症状:在预期时间内未收到从设备的响应。
诊断:
检查是否有太多的网络延迟或从设备处理请求的速度太慢。
确认超时设置是否合理。
解决方法:
增加超时设置的值。
减少网络上的负载或改善从设备的处理速度。
4. 校验错误(CRC错误)
症状:收到的数据帧的CRC校验和不正确。
诊断:
使用软件工具计算接收到的数据帧的CRC,并与帧中的CRC进行比较。
解决方法:
检查是否存在电磁干扰,并采取措施减少干扰(如使用屏蔽电缆)。
降低波特率以增加信号的可靠性。
5. 功能码错误或异常响应
症状:从设备返回异常码,指示请求无法正常执行。
诊断:
查看从设备文档,了解返回的异常码的含义。
检查请求数据帧是否有误,如功能码或数据范围不正确。
解决方法:
根据从设备的说明,更正发送的请求数据帧。
如果是设备限制导致的错误,考虑更改设备设置或程序逻辑来适应设备能力。
6. 设备故障或不响应
症状:从设备不回复任何请求,即使配置和连接似乎都正确。
诊断:
使用Modbus轮询工具直接测试从设备。
检查从设备的电源和状态指示灯。
解决方法:
重启从设备。
检查设备的维修手册,确定是否需要维修或更换。
7. 数据解析错误
症状:收到响应,但数据看起来不对劲或没有意义。
诊断:
检查你的数据解析逻辑是否正确。
验证你的软件是否按照正确的数据格式(如字节顺序或数据类型)解析响应。
解决方法:
确保解析函数正确地将原始字节转换为有用的数据类型(如整数、浮点数等)。
调整字节顺序(例如,Big-endian 和 Little-endian)以匹配从设备的输出。
诊断工具
在进行诊断时,通常有几个工具和技术可以帮助你:
Modbus 诊断软件
这些软件可以模拟主站或从站,并帮助你发送请求和解析响应。
串行通信监视器
硬件或软件工具,用于捕获和显示通过串行端口传输的数据。
多米特表(万用表)和示波器
用于检测电气信号的物理属性,如电压水平和噪声。
第6部分:实例应用(略)
简单的读写操作
提供一些基本的读取和写入线圈或寄存器的示例代码。
复杂的数据交互
介绍如何实现更复杂的交互,比如连续的寄存器读写,多设备通信等。
第7部分:调试和优化(略)
调试技巧
提供调试Modbus RTU通信的方法和工具推荐。
性能优化
讨论如何优化Modbus RTU网络的性能,包括设定合适的超时时间,避免通信冲突等策略。
第8部分:安全性考虑(略)
物理层安全
涉及到硬件层面的安全措施,比如防护措施和接入限制。
协议层安全
探讨Modbus RTU通信中可能存在的安全风险和相应的防范措施。

















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









