






Hierarchical Clustering of 3D Objects and its Application to Minimum Distance Computation 阅读笔记
3D对象的层次聚类及其在最小距离计算中的应用
摘要
本文提出了一种新的迭代算法,用于自动生成复杂3D场景中包含的对象的层次聚类(hierarchical clustering of the objects)。
所提出的面向对象的表示形式比八叉树(octrees)(传统的面向场景的分层表示形式(scene-oriented hierarchical representation))具有优势。
我们的方法可以提高最小距离计算等任务的运行速度。
我们在大型合成3D场景(synthetic 3D scenes) 上进行了实验。
导论
分层表示(Hierarchical representations)
- 分层表示将复杂的问题分解成一组有层次的更简单的表示形式。
- 分层表示可以用于运动计划(motion planning)、任务组织(task organization)、图像处理(image processing)等领域。
3D层次结构(3D hierarchical structures)
- 3D层次结构可以解决碰撞检测(collision detection)、可见性分析(visibility analysis)、路径规划(path planning)等空间推理问题。
- 3D层次结构生成方法包括 面向场景(scene-oriented) 和 面向对象(object-oriented) 两种。
- 面向场景:
- 定义:将给定场景视为一个整体,在层次结构的每个级别上逐步细分其体积。
- 分类:包括二元空间分区树(Binary Space Partitioning trees)、八叉树(Octress)和扩展八叉树(Extended Octrees)。
- 不足:由于场景中包含的对象被视为场景的一部分,而不是被视为单个实体,因此许多需要处理单个对象(例如,最小距离计算)的基本任务可能会性能显著下降。
- 面向对象:
- 定义:关注场景中包含的单个对象,而不是整个场景。
- 分类:包括对象内表示(intra-object representations) 和 对象间表示(intra-object representations) 两种。
- 对象内表示 将每个单个对象分解成基本几何图元(basic geometric primitives) 的层次结构(hierarchy)。例如构造实体几何(Constructive Solid geometry,简称为CSG)就是一种基本几何图元。
- 对象间表示 对对象进行分组。
- 面向场景:
对象间表示
A Generic Algorithm for Constructing Hierarchical Representations of Geometric Object
自底向上的启发式贪心聚类方法,将对象逐步分组为二叉树。
- 维护一个节点集合,该集合中所有节点都没有父节点。
- 对每一个节点对计算凸包,为凸包直径最小的节点对生成父节点。
Efficient Generation of Object Hierarchies from 3D Scenes
- 从全连接图中提取最小生成树(MST),保留场景中每对对象的分组成本、
- 成本函数基于万有引力定律。
- 从MST生成n元树。
优点:效率高。
缺点:随着分组的进行,成本函数缺乏更新。
例:
- 全连接图,和它的MST:
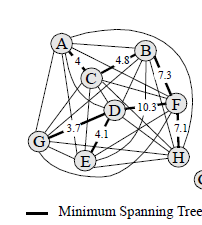
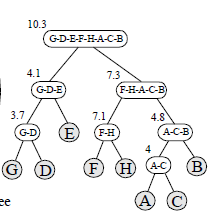
- 二元聚类树:将MST中的边根据权重递增排序,依次组合每条边连接的2个顶点。
即:先组合G和D,然后组合A和C,然后组合GD和E,……
缺点:太深了,因此要继续生成n元树。
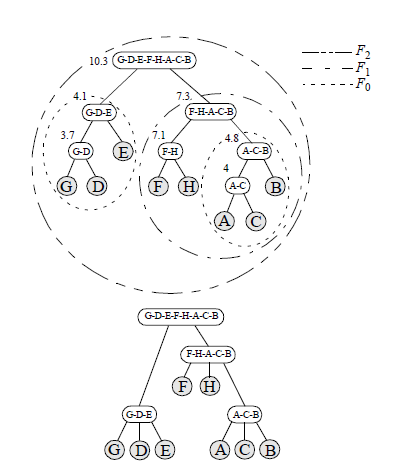
- n元树:合并可兼容的聚类
权重最小的两条边定义 F 0 F_0 F0,即GDE。
迭代地:- 计算 F i F_i Fi的均值 μ i \mu_i μi和标准差 σ i \sigma_i σi。
- 如果某一条边的权重 w w w,满足 w < μ i + 2 σ i w<\mu_i+2\sigma_i w<μi+2σi,则将该边加入 F i F_i Fi。
- 当没有满足条件的边时,按照相同的方法生成新的家族
F
i
+
1
F_{i+1}
Fi+1。
生成的家族为: F 0 = { 3.7 , 4 , 4.1 , 4.8 } F_0=\{3.7,4,4.1,4.8\} F0={3.7,4,4.1,4.8}, F 1 = { 7.1 , 7.3 } F_1=\{7.1,7.3\} F1={7.1,7.3}, F 2 = { 10.3 } F_2=\{10.3\} F2={10.3}。
通过合并相邻且权重边属于同一家族的聚类,生成n元图。
本文方法
- 定义了一个更合理直观的代价函数。
- 迭代过程。通过对前一级的 边界球(bounding sphere)(即包含所有对象的n维球)进行分组,来构建 层次结构(hierarchy) 的每一个层级(level)。当只剩单个边界球时,迭代停止。
- 包括三个阶段:
- 建立全连接图。每条边的权重为:在当前级别上,对该球对进行 分组(group) 的 代价(cost)。
- 计算该图的最小生成树MST
- 对MST的边基于代价进行聚类。
第一阶段:全连接图生成
以层次结构中的第
λ
\lambda
λ 层级为例,
S
=
{
S
1
,
.
.
.
,
S
N
}
S=\{S_1,...,S_N\}
S={S1,...,SN}是该层中出现的
N
N
N个球。
S
i
S_i
Si 的半径为
r
i
r_i
ri,3D球心为
C
i
C_i
Ci。
- 一开始,这些球就是他们所包含的对象的边界球
- 如果两球 S i S_i Si和 S j S_j Sj被分组,它们将被他们的 最小边界球 S i j S_{ij} Sij 代替。
分组过程建立了一个全连接图,图中的每个节点代表了第 λ \lambda λ 层级的的一个球,每条边的权重代表了将其两端的球分组的代价。
分组代价函数(grouping cost function)
背景:
- 过去使用的代价函数基于两个对象间的attraction force,或启发式地认为大小相似的两个对象应该被合并。
- 我们的方法结合两者优点,既考虑最小边界球的大小,又考虑填充因子。
填充因子(filling factor):
- 定义: 衡量 原来的两个球 占 分组后的球(即它们的最小边界球) 的比率。(填充的程度)
- 背景: 过去的算法使用直径的比率作为填充因子,(一维)。如图,它会将a、b、c三种情况都判断为有相同的填充因子,显然是不合理的。
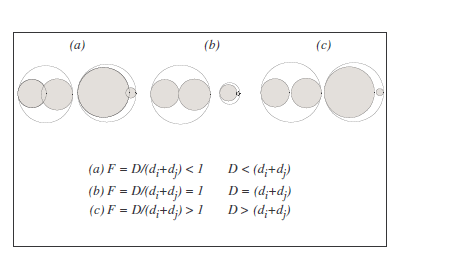
- 方法: 使用 原本两个球的体积和 与 最小边界球的体积 的 比率 作为 填充因子,是对空白空间的度量
- 每个球 S i S_i Si都有一个填充因子 F i F_i Fi, F i F_i Fi可以迭代计算。 F i j = ( F i V o l i + F j V o l j − V o l o v e r l a p ) / V o l i j F_{ij}=(F_iVol_i+F_jVol_j-Vol_{overlap})/Vol_{ij} Fij=(FiVoli+FjVolj−Voloverlap)/Volij
边界球大小:
- 目的: 保证分组的单调性增长。
- **方法:**使用其半径 r r r进行度量。
分组代价函数:
假设球
S
i
S_i
Si和
S
j
S_j
Sj的最小边界球
S
i
j
S_{ij}
Sij的半径为
r
i
j
r_{ij}
rij。代价函数为:
ζ
i
j
=
r
i
j
3
/
F
i
j
\zeta_{ij}=r_{ij}^3/F_{ij}
ζij=rij3/Fij
两球越小越接近,分组代价函数就越小。
第二阶段:MST生成
对一个有
N
N
N个节点和
M
M
M条边的图。
使用Kruskal算法,可以在
O
(
M
l
o
g
N
)
O(MlogN)
O(MlogN)的时间内生成MST。
第三阶段:对象聚类和新层级生成
- 最底层级由所有初始球组成。
- 使用X-means算法,根据分组代价,生成MST中所有边的簇。
- 新层级生成过程:根据一组簇中的边合并节点,生成的新的球与未被合并的球组成新的层级。
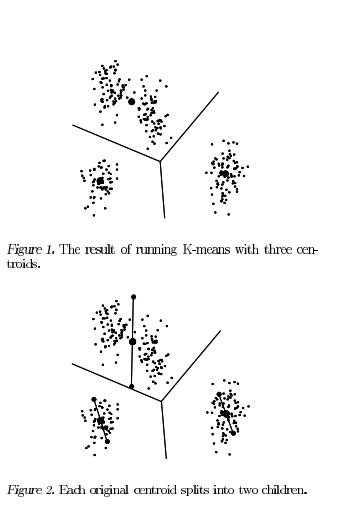
X-means算法
对k-means算法进行改进,但是中心点的数目是可增加的,输入给定一个中心点数目的范围,从下界开始,达到上界时终止。
X-means:
- 执行正常的k-means算法直至收敛
- 尝试增加新的中心点。
- 如果中心点数目达到上界,终止算法。否则,goto 1。
两种增加中心点的方法:
- 每次分裂一个簇的中心点:
- 选择一个簇进行分裂,在原中心点附近增加一个中心点,执行k-means算法。计算收敛后的簇集的得分,判断是否增加该中心点。
- 时间复杂度为 O ( K m a x ) O(K_{max}) O(Kmax),复杂度较高。
- 每次分裂所有的簇:
- 使用一种启发式方法,每次将所有的簇都各分成两半,执行k-means算法。计算收敛后的簇集的得分,判断是否保留这些分裂。
- 时间复杂度为 O ( l o g K m a x ) O(logK_{max}) O(logKmax),但是每次都成倍地增加簇的数目,步子迈得太大了。
本文方法:
- 先分裂所有的簇(即使用第二种方法)。对每一个簇,将其中心点分为两个子中心点——在某一 随机方向 上 相对移动 与区域大小成比例的一段距离。
- 对每一个父簇,以两个子中心点为初始中心点,运行一个局部的 k-means(k=2)算法,得到收敛后的结果。
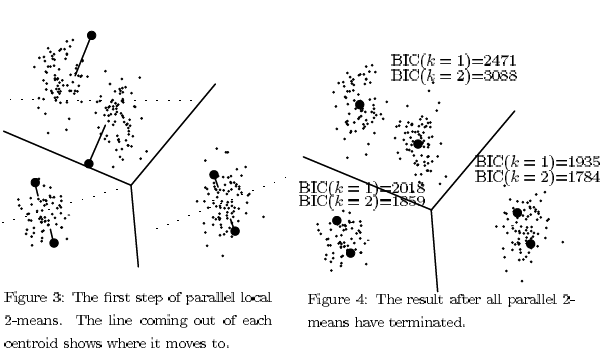
- 判断对每一个簇所进行的分裂操作是否有意义,即获得的子模型相对父模型效果是否有提升。
BIC Scoring

BIC Scoring:
贝叶斯信息量准则(Bayesian information criterion,BIC):
- 是在有限集合中进行模型选择的准则。(越低越好)
极大似然估计(Maximum Likelihood Estimation,MLE):
- 用于估计一个概率模型的参数。
- 给定一个概率分布
D
D
D,已知其概率密度函数(连续分布)或概率质量函数(离散分布)为
f
D
f_D
fD,以及一个分布参数
θ
\theta
θ ,我们可以从这个分布中抽出一个具有
n
n
n个值的采样
X
1
,
X
2
,
…
,
X
n
X_1, X_2,\ldots, X_n
X1,X2,…,Xn,利用
f
D
f_D
fD计算出其似然函数:
L ( θ ∣ x 1 , … , x n ) = f θ ( x 1 , … , x n ) L(\theta \mid x_{1},\dots ,x_{n})=f_{\theta }(x_{1},\dots ,x_{n}) L(θ∣x1,…,xn)=fθ(x1,…,xn)
最大似然估计会寻找关于 θ \theta θ的最可能的值(即,在所有可能的 θ \theta θ取值中,寻找一个值使这个采样的“可能性”最大化)。从数学上来说,我们可以在 θ \theta θ的所有可能取值中寻找一个值使得似然函数取到最大值。这个使可能性最大的 θ ^ \widehat{\theta} θ 值即称为 θ \theta θ的最大似然估计。
数据
D
D
D、一系列候选模型
M
j
M_j
Mj(不同的模型对应不同的
K
K
K值)
使用后验概率
P
r
[
M
j
∣
D
]
Pr[M_j|D]
Pr[Mj∣D]来评价模型的得分。
假定簇中的点都符合高斯分布,求解在什么样的参数下,方差最小,满足高斯分布的概率最大。方差使用欧氏距离。
R
R
R是所有点的数量

B
I
C
(
M
j
)
=
l
j
^
(
D
)
−
p
j
2
⋅
log
R
BIC(M_j) = \hat{l_j}(D) - \frac{p_j}{2}\cdot \textrm{log} R
BIC(Mj)=lj^(D)−2pj⋅logR
p
j
2
⋅
l
o
g
R
\frac{p_j}{2}\cdot logR
2pj⋅logR是惩罚因子,对自由变量的惩罚。

R
n
R_n
Rn是由
∑
i
\sum_i
∑i求和得到的。
总结:
-
B
I
C
(
ϕ
)
=
l
^
ϕ
(
D
)
−
p
ϕ
2
⋅
l
o
g
R
BIC(\phi) = \hat{l}_{\phi}(D)-\frac{p_{\phi}}{2}\cdot logR
BIC(ϕ)=l^ϕ(D)−2pϕ⋅logR
其中:- ϕ \phi ϕ指模型。
- D D D指所有的数据。
- l ^ ϕ ( D ) \hat{l}_{\phi}(D) l^ϕ(D)是模型 ϕ \phi ϕ的最大对数似然。
- p ϕ p_{\phi} pϕ是模型 ϕ \phi ϕ中参数的个数,作为模型复杂度的惩罚因子。
- R R R是点的数目。
- X-Means算法假设:identical spherical assumption
- 数据由 X X X个高斯函数产生,每个高斯函数有一样的方差 σ \sigma σ(每个维度上的变量不相关,协方差矩阵为 d i a g ( σ ) diag(\sigma) diag(σ))、不同的均值 μ i \mu_i μi;
- 数据生成时,根据概率 p i p_i pi选择一个高斯函数 g i g_i gi,然后生成一个点。
- 似然函数为:
l ^ ϕ ( D ) = ∑ i = 1 R [ l o g p ( g i ) ] \hat{l}_{\phi}(D)=\sum_{i=1}^R[logp(g_i)] l^ϕ(D)=i=1∑R[logp(gi)]
新层级生成过程
假设当前层级为
λ
\lambda
λ层级。
假设
ξ
=
{
E
0
,
E
1
,
.
.
.
,
E
k
,
.
.
.
E
m
}
\xi=\{E_0,E_1,...,E_k,...E_m\}
ξ={E0,E1,...,Ek,...Em}是当前簇中所有边的集合,且这些边按照其代价升序排列。
依次对 E k ( k = 0 , 1 , . . . , m ) E_k(k=0,1,...,m) Ek(k=0,1,...,m)执行以下操作,假设边 E k E_k Ek连接球 S i S_i Si和球 S j S_j Sj:
- 如果 S i S_i Si和 S j S_j Sj没被合并(merge)过,直接将 S i S_i Si和 S j S_j Sj合并,使用它们的最小边界球 S i j S_{ij} Sij作为一个新的对象。 S i j S_{ij} Sij对应一个填充因子 F i j F_{ij} Fij。
- 如果 S i S_i Si或 S j S_j Sj已经被其他球合并过了,(将它们被合并产生的新球分别称作 S I S_I SI和 S J S_J SJ),则计算 S I S_I SI和 S J S_J SJ的代价 ζ I J \zeta_{IJ} ζIJ。如果 ζ I J ≤ ζ m \zeta_{IJ}\leq\zeta_m ζIJ≤ζm,则将 S I S_I SI和 S J S_J SJ合并;否则不合并。
生成新的层级,即第 λ − 1 \lambda-1 λ−1层
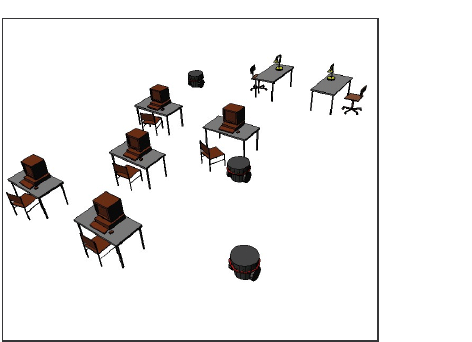
实验
方法被用于复杂的合成3d场景。
场景层次结构
如图展示了一个包含24个对象的场景。
下图展示了该场景层次结构的每一个层级。
其中:
- 深色实心球体 表示 在之前的层级中被合并的对象。
- 深色线框球体 表示 在当前层级将要被合并的对象。
- 浅色线框球体 表示 在当前层级中不会被合并的对象。

最小距离计算
确定与 给定直线段 距离最近 的 对象。如下图所示。
















 1592
1592











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









