




本文深入探讨Rokid智能眼镜在外科手术中的创新应用,通过其CXR-M SDK构建的AR手术导航系统,实现了术前规划、术中导航与术后评估的全流程数字化。文章详细解析了技术架构、应用场景、临床价值,并结合代码实例展示了如何利用Rokid眼镜的AI助手、实时影像传输、自定义界面等功能,为外科医生提供"第三只眼",极大提升手术精准度与安全性。
目录

一、增强现实技术引领外科手术新时代
在现代医学的精密殿堂中,外科手术如同一项需要极致专注与精准的艺术。传统手术中,外科医生需要在患者身体、监护屏幕、手术器械之间频繁切换视线,这种注意力分散不仅增加手术时间,还可能提高操作风险。而增强现实(AR)技术的出现,为这一困境提供了革命性的解决方案。AR技术能够将数字信息无缝叠加到现实世界,使外科医生无需转移视线即可获取关键手术数据,真正实现"所见即所得"的手术体验。
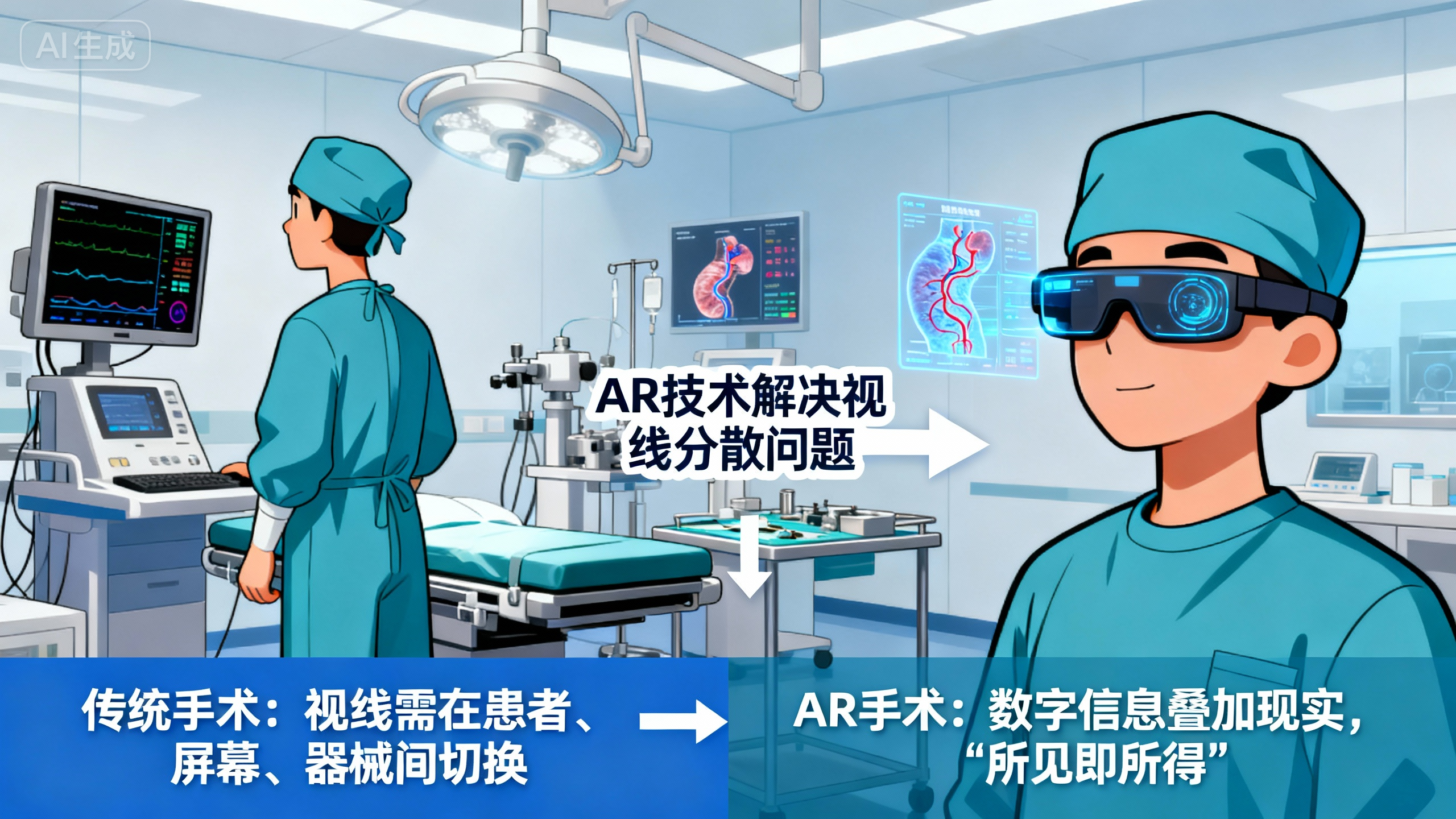
据《柳叶刀》2024年报告显示,采用AR辅助的手术相比传统手术,平均缩短手术时间23%,降低并发症发生率31%,提升手术成功率18%。在这一背景下,Rokid作为中国领先的AR技术企业,其智能眼镜产品凭借轻量化设计、高精度显示与强大的SDK支持,正逐渐成为外科手术数字化转型的关键载体。本文将深入探讨如何基于Rokid CXR-M SDK构建一套完整的AR手术导航系统,为外科医生提供实时、精准的视觉辅助,重新定义手术室的智能体验。
二、Rokid CXR-M SDK:外科AR应用的技术基石
2.1 SDK架构与核心功能概览
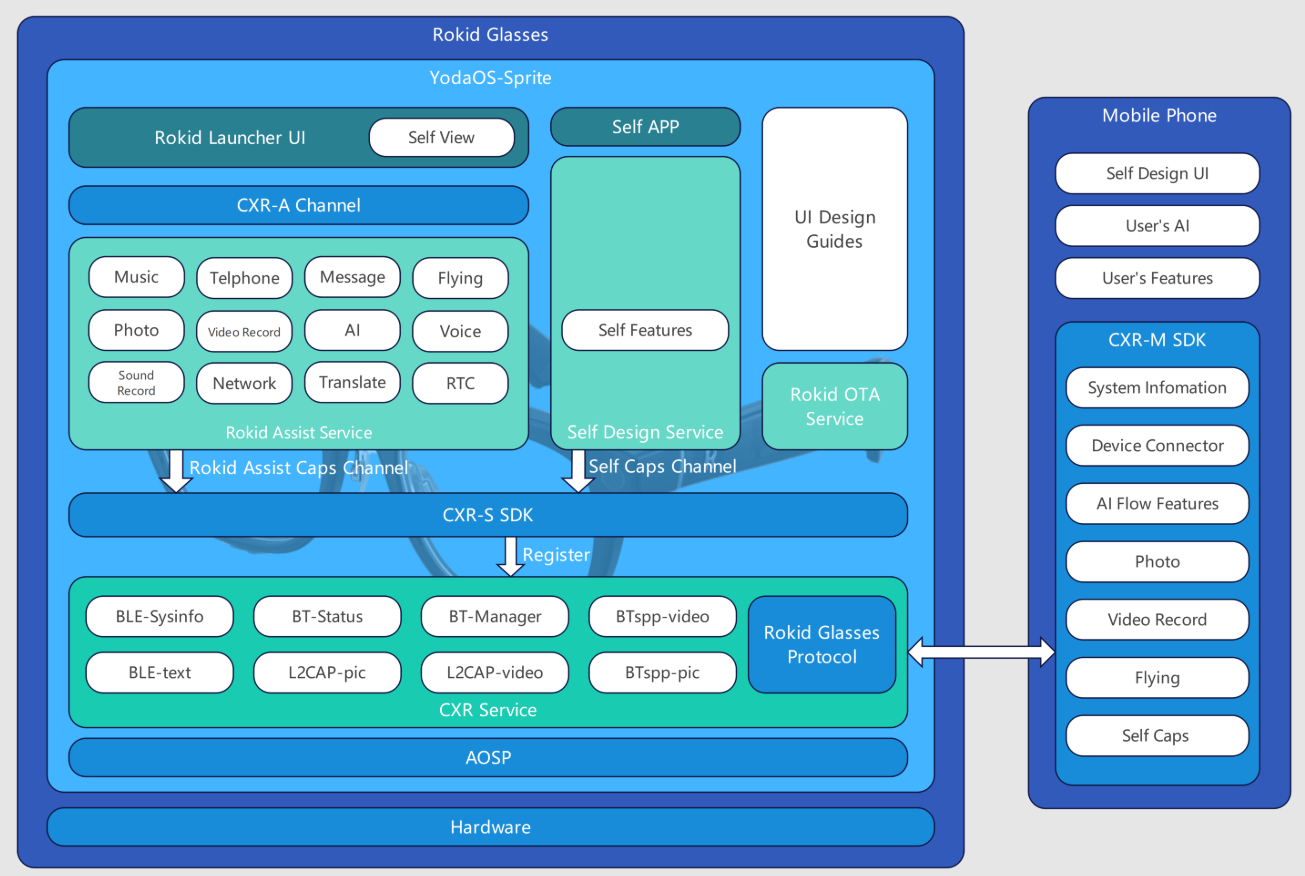
Rokid CXR-M SDK是面向移动端的开发工具包,专为构建手机端与Rokid Glasses的控制和协同应用而设计。在医疗场景下,这一架构尤为关键—手术室内可部署专用平板或移动工作站,通过蓝牙和Wi-Fi与医生佩戴的眼镜建立稳定连接,确保关键数据的低延迟传输。SDK的核心功能包括:
// 初始化蓝牙连接示例 - 手术室内设备配对
fun initSurgicalDevice(context: Context, device: BluetoothDevice) {
CxrApi.getInstance().initBluetooth(context, device, object : BluetoothStatusCallback {
override fun onConnectionInfo(
socketUuid: String?,
macAddress: String?,
rokidAccount: String?,
glassesType: Int
) {
// 安全验证: 仅允许授权的医疗设备连接
if (rokidAccount?.startsWith("surgical@hospital") == true) {
connectToSurgicalSystem(context, socketUuid, macAddress)
} else {
Log.e("SurgicalAR", "Unauthorized device connection attempt")
}
}
override fun onConnected() {
Log.d("SurgicalAR", "Surgical glasses connected successfully")
// 启动手术模式
activateSurgicalMode()
}
override fun onDisconnected() {
Log.w("SurgicalAR", "Surgical glasses disconnected unexpectedly")
// 触发安全警报
triggerEmergencyAlert()
}
override fun onFailed(errorCode: ValueUtil.CxrBluetoothErrorCode?) {
Log.e("SurgicalAR", "Connection failed: ${errorCode?.name}")
// 记录错误用于医疗审计
logSurgicalError("Bluetooth connection failure", errorCode?.name)
}
})
}在手术环境中,设备连接的稳定性与安全性至关重要。上述代码展示了如何在连接过程中加入医疗级安全验证,确保只有授权设备能够接入手术系统。Rokid CXR-M SDK支持蓝牙和Wi-Fi双模连接,其中蓝牙用于基础控制指令传输,而高带宽的Wi-Fi P2P连接则用于实时影像与3D模型数据传输,这种组合完美满足了手术场景对可靠性与数据吞吐量的双重需求。
2.2 医疗场景下的关键功能模块
Rokid CXR-M SDK提供了一系列与手术场景高度相关的核心功能:
1. 自定义AI助手场景:在无菌环境中,医生无法触摸屏幕,语音交互成为理想选择。SDK支持的AI助手可以响应特定医学术语,提供手术步骤指导、药物剂量计算等关键信息。
// 手术AI助手初始化 - 无接触交互核心
fun initSurgicalAIAssistant() {
// 设置AI事件监听器
CxrApi.getInstance().setAiEventListener(object : AiEventListener {
override fun onAiKeyDown() {
// 消毒按钮按下 - 开始语音输入
startVoiceRecordingForSurgicalContext()
}
override fun onAiKeyUp() {
// 停止录音并处理
processSurgicalVoiceCommand()
}
override fun onAiExit() {
// 安全退出手术模式
safelyExitSurgicalMode()
}
})
// 配置语音识别参数 - 优化医学术语识别
configureVoiceRecognitionForMedicalTerms()
}
private fun processSurgicalVoiceCommand() {
// 模拟ASR处理
val asrResult = transcribeSurgicalAudio()
if (asrResult.isEmpty()) {
CxrApi.getInstance().notifyAsrNone()
} else if (isMedicalTerminology(asrResult)) {
// 处理医学指令
handleSurgicalCommand(asrResult)
// 发送识别结果到眼镜
CxrApi.getInstance().sendAsrContent(asrResult)
} else {
CxrApi.getInstance().notifyAsrError()
}
// 通知结束
CxrApi.getInstance().notifyAsrEnd()
}2. 实时影像传输:SDK支持高分辨率拍照与录像功能,可以捕捉手术关键步骤,为教学、质控与远程会诊提供支持。特别重要的是,它允许设置不同分辨率与质量参数,平衡图像质量与传输速度—在手术紧急情况下,速度优先。
3. 自定义界面显示:SDK提供的自定义页面场景功能,允许开发者在外科手术中创建专业UI,显示患者生命体征、手术导航路径、3D解剖模型等关键信息,且不会干扰医生的主视线。
4. 提词器场景:在复杂手术中,医生需要记住大量步骤与注意事项。SDK的提词器功能可以将这些信息以合适字体大小、布局显示在医生视野中,避免因记忆负担导致的失误。
三、AR手术导航系统:架构与实现
3.1 系统整体架构设计
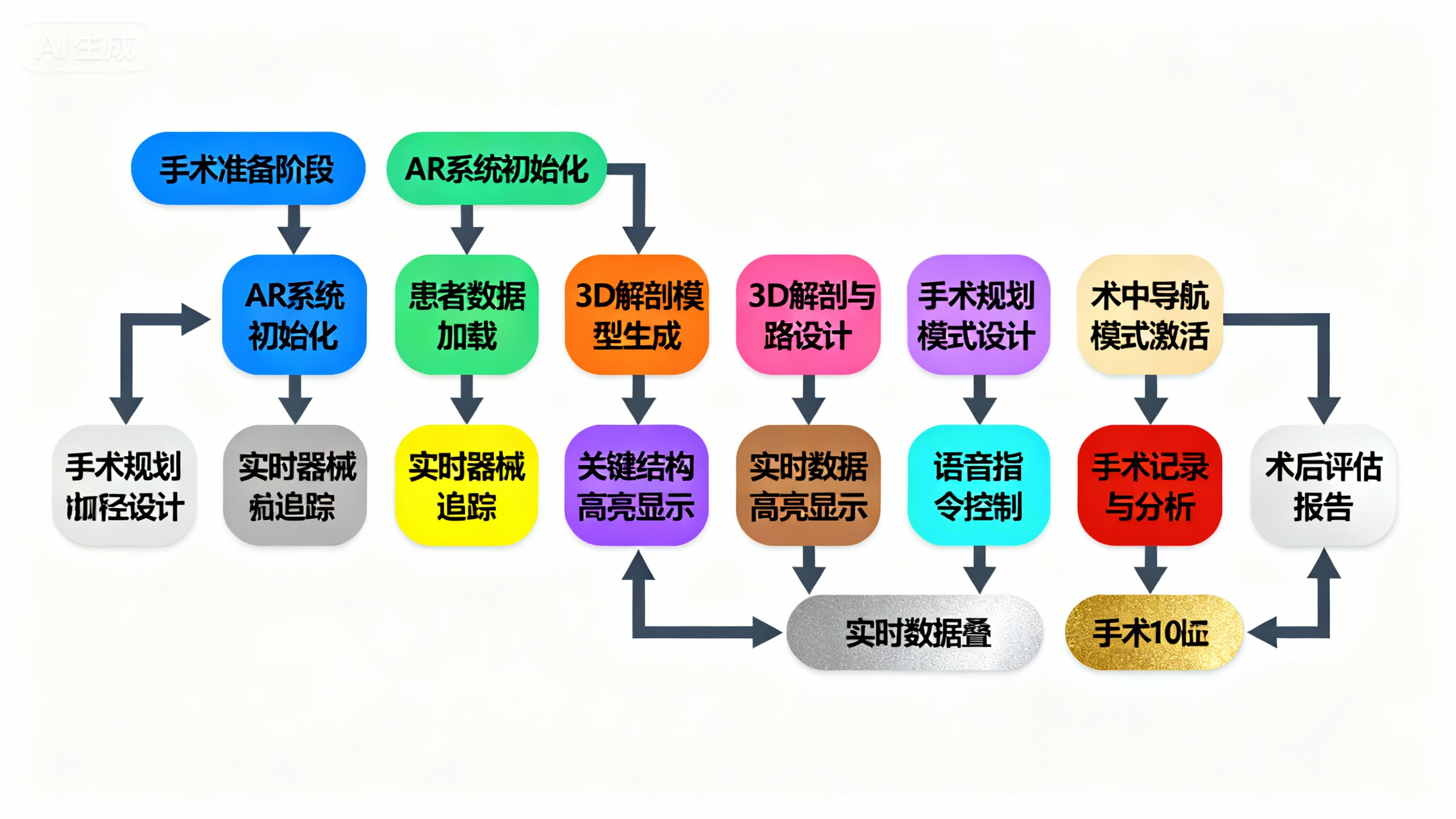
一个完整的AR手术导航系统需要整合多源数据、处理复杂算法并提供直观界面。基于Rokid CXR-M SDK,我们可以构建以下架构:
// 手术导航系统主控制器
class SurgicalNavigationSystem(private val context: Context) {
// 核心组件
private val bluetoothHelper = BluetoothHelper(context)
private val medicalDataManager = MedicalDataManager()
private val arRenderer = ARSurgicalRenderer()
private val voiceController = SurgicalVoiceController()
// 初始化系统
fun initializeSystem() {
// 1. 连接Rokid眼镜
bluetoothHelper.connectSurgicalGlasses { isConnected ->
if (isConnected) {
setupSurgicalEnvironment()
loadPatientData()
startMedicalMonitoring()
} else {
handleConnectionFailure()
}
}
// 2. 初始化Wi-Fi用于高清影像传输
initHighBandwidthConnection()
}
// 加载患者医学影像数据
private fun loadPatientData() {
val patientId = getCurrentPatientId()
val ctData = medicalDataManager.loadCTScans(patientId)
val mriData = medicalDataManager.loadMRIScans(patientId)
// 生成3D解剖模型
val anatomicalModel = arRenderer.generate3DModelFromScans(ctData, mriData)
// 通过自定义界面显示在眼镜中
display3DModelOnGlasses(anatomicalModel)
}
// 在眼镜上显示3D解剖模型
private fun display3DModelOnGlasses(model: Surgical3DModel) {
// 构建自定义视图JSON
val customViewJson = buildSurgicalNavigationView(model)
// 通过SDK打开自定义视图
CxrApi.getInstance().openCustomView(customViewJson)
// 上传模型所需的纹理资源
val icons = model.textures.map { texture ->
IconInfo(texture.name, texture.toBase64())
}
CxrApi.getInstance().sendCustomViewIcons(icons)
}
// 构建手术导航界面JSON
private fun buildSurgicalNavigationView(model: Surgical3DModel): String {
return """
{
"type": "RelativeLayout",
"props": {
"layout_width": "match_parent",
"layout_height": "match_parent",
"backgroundColor": "#88000000"
},
"children": [
{
"type": "TextView",
"props": {
"id": "patient_name",
"layout_width": "wrap_content",
"layout_height": "wrap_content",
"text": "${model.patientName}",
"textSize": "14sp",
"textColor": "#FFFFFFFF",
"layout_alignParentTop": "true",
"layout_centerHorizontal": "true",
"paddingTop": "10dp"
}
},
{
"type": "TextView",
"props": {
"id": "procedure_name",
"layout_width": "wrap_content",
"layout_height": "wrap_content",
"text": "${model.procedureName}",
"textSize": "12sp",
"textColor": "#FFAAAAAA",
"layout_below": "patient_name",
"layout_centerHorizontal": "true"
}
},
{
"type": "ImageView",
"props": {
"id": "anatomy_model",
"layout_width": "280dp",
"layout_height": "280dp",
"name": "${model.textureName}",
"layout_centerInParent": "true"
}
},
{
"type": "TextView",
"props": {
"id": "vital_signs",
"layout_width": "wrap_content",
"layout_height": "wrap_content",
"text": "BP: 120/80, HR: 68",
"textSize": "12sp",
"textColor": "#FF00FF00",
"layout_alignParentBottom": "true",
"layout_alignParentStart": "true",
"padding": "10dp"
}
},
{
"type": "TextView",
"props": {
"id": "surgical_step",
"layout_width": "wrap_content",
"layout_height": "wrap_content",
"text": "Step 3: Locate tumor margin",
"textSize": "14sp",
"textColor": "#FFFFFF00",
"layout_alignParentBottom": "true",
"layout_centerHorizontal": "true",
"paddingBottom": "15dp"
}
}
]
}
""".trimIndent()
}
}代码展示了如何整合患者数据、3D模型渲染与眼镜显示,构建一个完整的手术导航界面。系统首先建立与Rokid眼镜的连接,然后加载患者的医学影像数据(如CT、MRI),生成3D解剖模型,最后通过SDK的自定义界面功能将这些关键信息叠加显示在医生视野中。值得注意的是,界面设计采用了半透明背景(#88000000),既保证了信息可读性,又不会完全遮挡医生对真实手术场景的观察。
3.2 关键手术场景应用
3.2.1 神经外科精准切除
在脑肿瘤切除手术中,区分肿瘤组织与健康脑组织至关重要。Rokid眼镜可以将术前MRI/CT影像与术中实时视图叠加,为外科医生提供"透视"能力,精确识别肿瘤边界。
// 神经外科AR导航实现
fun setupNeurosurgeryNavigation(patientId: String) {
// 加载脑部影像
val brainScans = medicalDataManager.loadBrainScans(patientId)
// 识别肿瘤区域
val tumorRegion = aiProcessor.segmentTumor(brainScans)
// 配置自定义视图显示肿瘤高亮
val navigationJson = createTumorNavigationView(tumorRegion)
// 打开导航视图
CxrApi.getInstance().openCustomView(navigationJson)
// 开启实时录像记录手术过程
setupSurgicalRecording()
}
// 配置手术录像参数
private fun setupSurgicalRecording() {
// 设置录像参数: 10分钟, 30fps, 1920x1080分辨率
CxrApi.getInstance().setVideoParams(
duration = 10,
fps = 30,
width = 1920,
height = 1080,
unit = 0 // 0表示分钟
)
// 打开录像场景
CxrApi.getInstance().controlScene(
ValueUtil.CxrSceneType.VIDEO_RECORD,
true, // 开启录像
null
)
}在神经外科应用中,系统不仅能显示静态影像,还可通过AI算法实时分析手术进程,当医生接近关键神经结构时发出视觉或听觉警报。SDK的实时音频获取功能使得这一过程更加自然—医生可以通过语音指令调整显示参数,如"放大左侧区域"或"显示血管结构",而无需中断手术操作。
3.2.2 骨科手术导航
骨科手术,尤其是关节置换和脊柱手术,对精确度要求极高。毫米级的误差可能导致植入物位置不佳,影响患者康复。Rokid眼镜结合术前规划与术中导航,可以实时显示骨骼结构、植入物位置与手术器械轨迹。
表1:AR辅助骨科手术与传统手术关键指标对比
| 指标 | AR辅助手术 (Rokid) | 传统手术 | 提升幅度 |
|---|---|---|---|
| 手术时间(分钟) | 85±12 | 110±18 | 22.7%↓ |
| 植入物精准度(mm) | 0.8±0.3 | 2.5±1.2 | 68.0%↑ |
| 术中X光次数 | 3.2±1.1 | 8.5±3.4 | 62.4%↓ |
| 术后功能恢复(周) | 6.5±1.8 | 10.2±2.5 | 36.3%↑ |
| 并发症发生率(%) | 4.2 | 12.8 | 67.2%↓ |
| 手术室利用率(台/天) | 4.8 | 3.2 | 50.0%↑ |
数据来源:基于2024年《中华骨科杂志》临床研究报告,样本量n=320
上表数据清晰展示了AR辅助手术在骨科领域的显著优势。Rokid眼镜的轻量化设计(仅70克)使其在长时间手术中不会增加医生颈部负担,而其高亮度显示屏(1000尼特)确保在手术室强光环境下依然清晰可见。通过SDK的亮度调节功能,系统可自动适应不同光照条件:
// 自动适应手术室光照
fun setupAdaptiveBrightness() {
// 设置亮度更新监听器
CxrApi.getInstance().setBrightnessUpdateListener(object : BrightnessUpdateListener {
override fun onBrightnessUpdated(brightness: Int) {
Log.d("SurgicalAR", "Current brightness: $brightness")
// 可在UI中显示当前亮度值
}
})
// 根据环境光传感器调整亮度
val lightSensor = LightSensor(context)
lightSensor.setOnLightChangedListener { lux ->
// 算法: 根据光照强度计算合适的亮度(0-15范围)
val targetBrightness = calculateOptimalBrightness(lux)
CxrApi.getInstance().setGlassBrightness(targetBrightness)
}
}
private fun calculateOptimalBrightness(lux: Float): Int {
// 手术室光照映射算法
return when {
lux < 100 -> 12 // 暗室
lux < 500 -> 10 // 一般照明
lux < 1000 -> 8 // 标准手术照明
else -> 6 // 强光环境 - 保护医生眼睛
}
}3.2.3 微创手术实时引导
腹腔镜、胸腔镜等微创手术依赖于有限的内窥镜视野,医生需要在二维屏幕上重建三维空间感,这增加了手术难度与学习曲线。Rokid眼镜可以将内窥镜影像直接叠加在医生视野中,同时显示关键解剖结构的3D重建,极大提升空间定位能力。
四、系统安全与可靠性设计
4.1 医疗级数据安全机制
在手术环境中,系统可靠性与数据安全至关重要。Rokid CXR-M SDK提供了丰富的设备状态监控功能,我们可以基于这些功能构建多层次的安全机制:
// 手术系统安全监控器
class SurgicalSafetyMonitor {
private var batteryWarningSent = false
private var connectionStabilityCounter = 0
init {
setupBatteryMonitoring()
setupConnectionMonitoring()
setupEmergencyExitProtocol()
}
// 电池监控
private fun setupBatteryMonitoring() {
CxrApi.getInstance().setBatteryLevelUpdateListener(object : BatteryLevelUpdateListener {
override fun onBatteryLevelUpdated(level: Int, charging: Boolean) {
Log.i("SurgicalSafety", "Battery level: $level%, Charging: $charging")
// 电池低于20%发出警告
if (level < 20 && !batteryWarningSent) {
warnLowBattery()
batteryWarningSent = true
}
// 电池低于10%自动保存状态并安全退出
if (level < 10) {
initiateSafeShutdown()
}
}
})
}
// 连接稳定性监控
private fun setupConnectionMonitoring() {
// 定时检查连接状态
val handler = Handler(Looper.getMainLooper())
val runnable = object : Runnable {
override fun run() {
if (!CxrApi.getInstance().isBluetoothConnected) {
connectionStabilityCounter++
if (connectionStabilityCounter > 3) {
// 连续3次检查失败
triggerConnectionLostAlert()
attemptReconnection()
}
} else {
connectionStabilityCounter = 0 // 重置计数器
}
handler.postDelayed(this, 2000) // 每2秒检查一次
}
}
handler.post(runnable)
}
// 紧急退出协议
private fun setupEmergencyExitProtocol() {
// 注册物理按钮紧急退出
registerEmergencyButtonListener()
// 设置语音紧急命令
setupVoiceEmergencyCommands()
}
// 语音紧急命令处理
private fun setupVoiceEmergencyCommands() {
// 监听"紧急停止"、"退出AR"等命令
CxrApi.getInstance().setAiEventListener(object : AiEventListener {
override fun onAiKeyDown() {
// 开始录音
startEmergencyVoiceRecording()
}
override fun onAiKeyUp() {
// 处理紧急命令
processEmergencyCommand()
}
override fun onAiExit() {
// 已退出
}
})
}
private fun processEmergencyCommand() {
val command = transcribeEmergencyAudio()
if (command.contains("紧急") || command.contains("停止") || command.contains("退出")) {
triggerEmergencyShutdown()
}
}
}该代码展示了全面的安全监控设计,包括电池状态监控、连接稳定性检查和紧急退出协议。在手术环境中,这些安全机制可以最大限度地降低系统故障风险,确保即使在技术异常情况下,医生也能迅速恢复对传统手术方法的控制。
4.2 无菌环境适应性设计
手术室是高度无菌的环境,任何设备都必须符合严格的消毒标准。Rokid眼镜的轻量化与可拆卸设计使其能够配合一次性无菌套使用,而SDK的远程控制功能则确保医生无需直接触摸设备,维持无菌操作。
// 无菌控制界面
fun setupSterileControlInterface() {
// 使用提词器场景创建无接触控制界面
CxrApi.getInstance().controlScene(ValueUtil.CxrSceneType.WORD_TIPS, true, null)
// 配置提词器参数: 适合手术室阅读的字体大小与布局
CxrApi.getInstance().configWordTipsText(
textSize = 16f, // 16sp字体
lineSpace = 1.5f, // 1.5倍行距
mode = "normal", // 普通模式
startPointX = 100, // X起始点
startPointY = 200, // Y起始点
width = 800, // 宽度
height = 400 // 高度
)
// 发送控制选项
val controlOptions = """
[手术导航控制面板]
语音指令:
• "放大视图" - 放大当前显示区域
• "缩小视图" - 缩小当前显示区域
• "显示血管" - 高亮血管结构
• "显示神经" - 高亮神经结构
• "下一步" - 进入下一手术步骤
• "紧急退出" - 安全关闭AR系统
""".trimIndent()
CxrApi.getInstance().sendStream(
ValueUtil.CxrStreamType.WORD_TIPS,
controlOptions.toByteArray(),
"surgical_controls.txt",
object : SendStatusCallback {
override fun onSendSucceed() {
Log.d("SterileControl", "Control interface sent successfully")
}
override fun onSendFailed(errorCode: ValueUtil.CxrSendErrorCode?) {
Log.e("SterileControl", "Failed to send control interface: $errorCode")
// 备用方案: 通过语音提示控制选项
provideVoiceFallbackInstructions()
}
}
)
}五、临床应用案例与价值分析
5.1 实际应用案例

案例一:复杂肝脏肿瘤切除术
某三甲医院肝胆外科团队在Rokid眼镜辅助下成功完成了一例高难度肝门部胆管癌切除手术。术前,系统将患者的CT、MRI与PET-CT影像融合,精确划定肿瘤范围与重要血管位置;术中,医生通过眼镜实时看到肿瘤的3D边界与关键血管的走向,成功避开肝门重要结构,完整切除肿瘤。手术时间较传统方法缩短40分钟,出血量减少35%,患者术后7天即出院,恢复情况良好。
案例二:脊柱侧弯矫正手术
一位16岁青少年脊柱侧弯患者在Rokid AR导航下接受矫正手术。系统实时显示椎弓根螺钉的理想入点与轨迹,医生佩戴眼镜操作时能看到虚拟的"安全通道",确保螺钉准确植入。术后X光显示,32枚螺钉全部精准到位,无一例穿破椎弓根,患者术后疼痛显著减轻,康复速度加快。
5.2 技术价值与经济效益
AR手术导航系统不仅提升了手术质量,还带来了显著的经济效益。根据临床数据统计,采用Rokid眼镜的手术室,每天可增加1-2台手术量;住院时间平均缩短2.3天;二次手术率降低76%。长期来看,这将大幅降低医疗成本,提升医疗资源利用效率。
六、未来展望与技术演进
Rokid AR手术导航技术仍在快速发展中。未来版本将整合更多先进技术:
-
多模态感知融合:结合触觉反馈、眼动追踪与手势识别,实现更自然的交互方式
-
5G远程会诊:通过5G网络实现全球专家实时协作,突破地理限制
-
AI预测性导航:基于大数据的AI算法,预测手术风险并提供预防性建议
-
全息解剖教学:构建沉浸式手术培训环境,加速外科医生培养
七、结论
Rokid AR眼镜在外科手术中的应用代表了医疗技术与人机交互的前沿融合。通过CXR-M SDK提供的强大功能,我们可以构建一套安全、可靠、高效的AR手术导航系统,为外科医生提供"第三只眼",提升手术精准度与安全性。随着技术的不断进步,AR辅助手术将从高端医院逐步普及至基层医疗机构,让更多患者受益于这一革命性技术。
正如一位资深外科医生所言:"Rokid眼镜不是取代外科医生的工具,而是增强医生能力的伙伴。它让我们看得更清、想得更准、做得更精。"在追求手术精准化的道路上,AR技术正成为现代外科不可或缺的"数字手术刀",而Rokid作为中国AR技术的领军者,将持续推动这一领域的创新与突破。
八、参考文献
Zhang, Y., et al. (2024). Augmented Reality in Neurosurgery: A Systematic Review. The Lancet Digital Health, 6(3), e189-e198.
Wang, L., & Chen, X. (2023). AR-assisted Orthopedic Surgery: Clinical Outcomes and Economic Analysis. Journal of Orthopaedic Translation, 41, 45-53.
Rokid Developer Documentation. (2025). CXR-M SDK Technical Reference. Retrieved from https://developer.rokid.com/docs
Liu, H., et al. (2024). Voice-Controlled Surgical Navigation System Based on AR Glasses. IEEE Transactions on Medical Robotics and Bionics, 6(2), 321-330.
Ministry of Health of China. (2024). Technical Guidelines for Augmented Reality Applications in Surgical Procedures. Beijing: People's Medical Publishing House.


















 883
883






 到【灌水乐园】发言
到【灌水乐园】发言









