







 本文详细介绍了二维图像傅里叶变换在工业缺陷检测中的应用,包括滤波操作、幅度谱和相位谱的计算,以及如何使用OpenCV进行处理。通过实际案例和代码演示,展示了如何利用傅里叶变换进行织布脏污检测并区分不同滤波效果。
本文详细介绍了二维图像傅里叶变换在工业缺陷检测中的应用,包括滤波操作、幅度谱和相位谱的计算,以及如何使用OpenCV进行处理。通过实际案例和代码演示,展示了如何利用傅里叶变换进行织布脏污检测并区分不同滤波效果。
前言
目前,网上关于傅里叶变换的文章,主要是针对基础原理和一维信号滤波的讲解,对于二维图像处理则少有涉及。由于二维图像在频域处理的过程中,不仅需要做傅里叶变换,也会涉及到 幅度谱、相位谱、低频信号、高频信号、中心化操作、傅里叶反变换 等一系列概念,只有对这些概念和操作过程比较清楚,才能根据自己的需求得到较好的处理结果。本文就是针对这个问题进行创作的。
傅里叶变换在图像处理的应用主要包含一下几个方面:
- 在图像高低通滤波和选择性滤波中的应用
- 在图像压缩中的应用
- 在图像增强中的应用
欢迎大家的评论,我们互相讨论学习,今后将针对这一些列问题继续发文介绍。
一、问题概述
在工业缺陷检测的场景中,我们经常会遇到一些难以直接通过空域方法进行检测的现象。如图所示,在进行织布赃污的检测时,由于脏污区域与周围像素点的灰度值相差较小,且脏污区域内的像素灰度值变化较大,因此很难选择合适的阈值来进行图像二值化,从而确定脏污区域。

此时,我们就要在频域内对图像进行处理。通过频域滤波,滤除掉频率较低的成分(无脏污部分)和频率较高的成分(织布纹理图案部分),即可得到脏污区域的图像。
二、二维图像的傅里叶变换


结合 欧拉公式 可知,二维傅里叶变换结果包含 实数 R(u,v) 和 虚数 I(u,v) 两部分,从而可以根据R(u,v) 和 I(u,v) 计算傅里叶变换结果的幅度谱和相位谱,如下图所示:
![]()

可得,可见,经过傅里叶变换后,得到了两个与原图像同样大小的二维图像,分别表示 实数 和 虚数 部分。再根据幅频谱和相位谱的计算公式,得到为 幅度谱(magnitude) 和 相位谱(phase)
C++ 结合 opencv 实现代码:
/*对图像imgSrc进行傅里叶变换*/
//扩展图像到合适尺寸以加快Fourier变化的速度
Mat srcPadded;
auto m = getOptimalDFTSize(imgSrc.rows);
auto n = getOptimalDFTSize(imgSrc.cols);
copyMakeBorder(imgSrc, srcPadded, 0, m - imgSrc.rows, 0, n - imgSrc.cols, BORDER_REPLICATE, Scalar(0));
//提升像素精度并增加虚部通道以方便变换
srcPadded.convertTo(srcPadded, CV_32FC1);
Mat plane[] = { srcPadded, Mat::zeros(srcPadded.size(), srcPadded.type()) };
Mat imgComplex;
merge(plane, 2, imgComplex);
//执行傅里叶变换
dft(imgComplex, imgComplex);
结果如下图所示:

由于傅里叶变换后,图像中对应的低频成分在四角区域,高频成分在靠近中心区域(可以查阅相关资料进一步了解其计算原理)。为了便于滤波操作,通常需要对 幅度谱 和 相位谱 分别进行中心化处理,将低频成分集中在中心区域。
C++ 结合 opencv 实现代码:
//频率中心化
split(imgComplex, plane);
//实部操作
Mat temp;
int cx = plane[0].cols / 2;
int cy = plane[0].rows / 2;
Mat part1_r(plane[0], Rect(0, 0, cx, cy)); Mat part2_r(plane[0], Rect(cx, 0, cx, cy));
Mat part3_r(plane[0], Rect(0, cy, cx, cy)); Mat part4_r(plane[0], Rect(cx, cy, cx, cy));
part1_r.copyTo(temp); part4_r.copyTo(part1_r); temp.copyTo(part4_r);
part2_r.copyTo(temp); part3_r.copyTo(part2_r); temp.copyTo(part3_r);
//虚部操作
Mat part1_i(plane[1], Rect(0, 0, cx, cy)); Mat part2_i(plane[1], Rect(cx, 0, cx, cy));
Mat part3_i(plane[1], Rect(0, cy, cx, cy)); Mat part4_i(plane[1], Rect(cx, cy, cx, cy));
part1_i.copyTo(temp); part4_i.copyTo(part1_i); temp.copyTo(part4_i);
part2_i.copyTo(temp); part3_i.copyTo(part2_i); temp.copyTo(part3_i);
结果如下图所示:

接下来就可以进行滤波操作了。通常情况下,我们可以生成一个与原图同样大小的高斯核函数,与中心化处理的图像进行点乘操作,即可减少许多高频成分(即低通滤波)。再将实部和虚部的滤波结果合并,进行傅里叶反变换。
C++ 结合 opencv 实现代码:
GaussianLPFilter(…)等高斯滤波函数的实现方式见文末代码
//根据输入滤波器类型生成相应的滤波器
Mat filter;
switch (filter_type) {
case 1:
filter = GaussianLPFilter(m, n, sigma1, false, rtype); //
break;
case 2:
filter = GaussianHPFilter(m, n, sigma1, false, rtype);
break;
case 3:
filter = GaussianBPFilter(m, n, sigma2, sigma1, false, rtype);
break;
case 4:
filter = GaussianBSFilter(m, n, sigma2, sigma1, false, rtype);
break;
default:
filter = GaussianLPFilter(m, n, sigma1, false, rtype);
break;
}
//实部、虚部分别和滤波器相乘
Mat imgBlured_r, imgBlured_i;
multiply(plane[0], filter, imgBlured_r);
multiply(plane[1], filter, imgBlured_i);
//实部、虚部合并
Mat plane1[] = { imgBlured_r, imgBlured_i };
Mat imgFreqBlured;
merge(plane1, 2, imgFreqBlured);
//反变换到空间域,求幅值并且转换到原图像素类型
Mat result;
idft(imgFreqBlured, imgFreqBlured, DFT_SCALE);
split(imgFreqBlured, plane);
magnitude(plane[0], plane[1], result);
result.convertTo(plane[0], rtype);
结果如下图所示:

傅里叶反变换结果包含了实部和虚部两个二维图像,计算其幅度谱后,即可得到低通滤波结果。

为什么用反变换后的幅度谱来表示低通滤波结果,不考虑使用相位谱呢?幅度谱和相位谱分别代表什么含义呢?这个可以参考刘定生老师在《数字图像处理》中的ppt讲解(见下图)。这个涉及到较深的傅里叶变换原理的内容,能不能搞明白就看大家的能力了,我也没有很清楚

三、检测案例及代码分析
回到开头提到的织布脏污的检测,对于织布图像的纹理细节而言,其属于高频区域,对于没有脏污的区域而言,又属于低频区域。对图像分别进行低通,高通,带通滤波后,结果如下图所示:
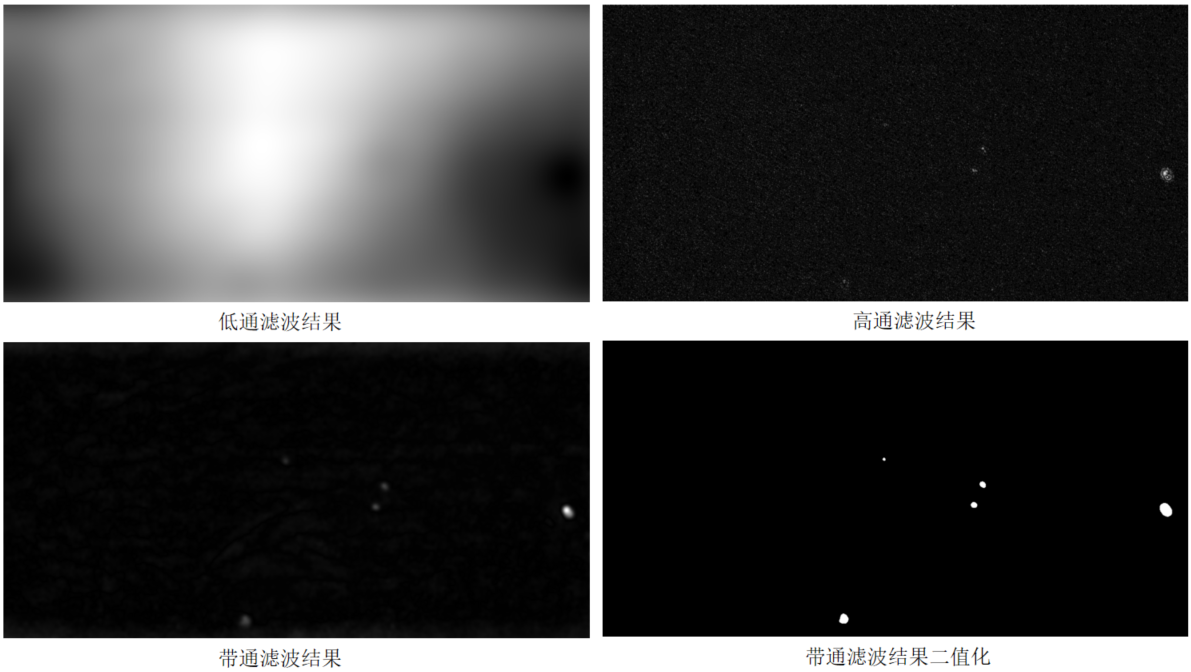
低通滤波结果中,看不到脏污信息;
高通滤波结果中,能看到部分脏污信息,同时,纹理区域也被识别出来;
带通滤波结果中,能够明显地区分出脏污区域。
频域滤波函数代码如下,这里使用高斯核进行滤波操作。
namespace InspectCV
{
Mat GaussianLPFilter(int rows, int cols, double sigma_x, bool bSameSigma, int ktype)
{
//高斯低通滤波器
double sigma_y = 0.0;
if (bSameSigma)
sigma_y = sigma_x;
else
sigma_y = sigma_x * rows / cols;
rows = getOptimalDFTSize(rows);
cols = getOptimalDFTSize(cols);
Mat kernelX = getGaussianKernel(cols, sigma_x, ktype);
Mat kernelY = getGaussianKernel(rows, sigma_y, ktype);
Mat kernel = kernelY * kernelX.t();
normalize(kernel, kernel, 0, 1, NORM_MINMAX);
return kernel;
}
Mat GaussianHPFilter(int rows, int cols, double sigma_x, bool bSameSigma, int ktype)
{
//高斯高通滤波器
Mat hpf = 1 - GaussianLPFilter(rows, cols, sigma_x, bSameSigma, ktype);
//normalize(hpf, hpf, 0.0, 1.0, CV_MINMAX);
return hpf;
}
Mat GaussianBPFilter(int rows, int cols, double sigma_x_high, double sigma_x_low, bool bSameSigma, int ktype)
{
//高斯带通滤波器
Mat filter_high = GaussianLPFilter(rows, cols, sigma_x_high, bSameSigma, ktype);
Mat filter_low = GaussianLPFilter(rows, cols, sigma_x_low, bSameSigma, ktype);
Mat bpf = filter_high - filter_low;
normalize(bpf, bpf, 0.0, 1.0, NORM_MINMAX);
return bpf;
}
Mat GaussianBSFilter(int rows, int cols, double sigma_x_high, double sigma_x_low, bool bSameSigma, int ktype)
{
//高斯带阻滤波器
return 1 - GaussianBPFilter(rows, cols, sigma_x_high, sigma_x_low, bSameSigma, ktype);
}
Mat GaussFreqBlur(const Mat& imgSrc, double sigma1, double sigma2, int filter_type, int rtype)
{
/*
filter_type == 1, 低通滤波;
filter_type == 2, 高通滤波;
filter_type == 3, 带通滤波;
filter_type == 4, 带阻滤波;
*/
//扩展图像到合适尺寸以加快Fourier变化的速度
Mat srcPadded;
auto m = getOptimalDFTSize(imgSrc.rows);
auto n = getOptimalDFTSize(imgSrc.cols);
copyMakeBorder(imgSrc, srcPadded, 0, m - imgSrc.rows, 0, n - imgSrc.cols, BORDER_REPLICATE, Scalar(0));
//提升像素精度并增加虚部通道以方便变换
srcPadded.convertTo(srcPadded, CV_32FC1);
Mat plane[] = { srcPadded, Mat::zeros(srcPadded.size(), srcPadded.type()) };
Mat imgComplex;
merge(plane, 2, imgComplex);
//正向变换
dft(imgComplex, imgComplex);
//频率中心化
split(imgComplex, plane);
//实部操作
Mat temp;
int cx = plane[0].cols / 2;
int cy = plane[0].rows / 2;
Mat part1_r(plane[0], Rect(0, 0, cx, cy)); Mat part2_r(plane[0], Rect(cx, 0, cx, cy));
Mat part3_r(plane[0], Rect(0, cy, cx, cy)); Mat part4_r(plane[0], Rect(cx, cy, cx, cy));
part1_r.copyTo(temp); part4_r.copyTo(part1_r); temp.copyTo(part4_r);
part2_r.copyTo(temp); part3_r.copyTo(part2_r); temp.copyTo(part3_r);
//虚部操作
Mat part1_i(plane[1], Rect(0, 0, cx, cy)); Mat part2_i(plane[1], Rect(cx, 0, cx, cy));
Mat part3_i(plane[1], Rect(0, cy, cx, cy)); Mat part4_i(plane[1], Rect(cx, cy, cx, cy));
part1_i.copyTo(temp); part4_i.copyTo(part1_i); temp.copyTo(part4_i);
part2_i.copyTo(temp); part3_i.copyTo(part2_i); temp.copyTo(part3_i);
//根据输入滤波器类型生成相应的滤波器
Mat filter;
switch (filter_type) {
case 1:
filter = GaussianLPFilter(m, n, sigma1, false, rtype);
break;
case 2:
filter = GaussianHPFilter(m, n, sigma1, false, rtype);
break;
case 3:
filter = GaussianBPFilter(m, n, sigma2, sigma1, false, rtype);
break;
case 4:
filter = GaussianBSFilter(m, n, sigma2, sigma1, false, rtype);
break;
default:
filter = GaussianLPFilter(m, n, sigma1, false, rtype);
break;
}
//实部、虚部分别和滤波器相乘
Mat imgBlured_r, imgBlured_i;
multiply(plane[0], filter, imgBlured_r);
multiply(plane[1], filter, imgBlured_i);
//实部、虚部合并
Mat plane1[] = { imgBlured_r, imgBlured_i };
Mat imgFreqBlured;
merge(plane1, 2, imgFreqBlured);
//反变换到空间域,求幅值并且转换到原图像素类型
idft(imgFreqBlured, imgFreqBlured, DFT_SCALE);
split(imgFreqBlured, plane);
magnitude(plane[0], plane[1], plane[0]);
plane[0].convertTo(plane[0], rtype);
//剪裁到输入图像尺寸大小并返回
return plane[0](Rect(0, 0, imgSrc.cols, imgSrc.rows));
}
}















 1369
1369











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









