






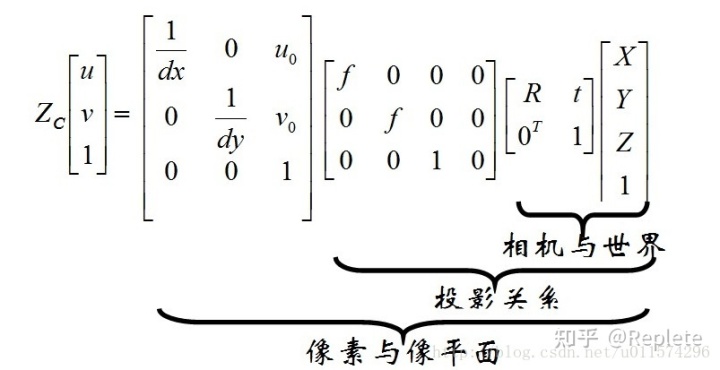
世界坐标系、相机坐标系、图像坐标系、像素坐标系之间的关系
看双目测距的时候一个公式就给难住了,网上各种解析很多更是弄得云山雾绕,写下自己的一点理解,自认为非常合理。

点P在成像平面上的两个点Pl、Pr的坐标分别是
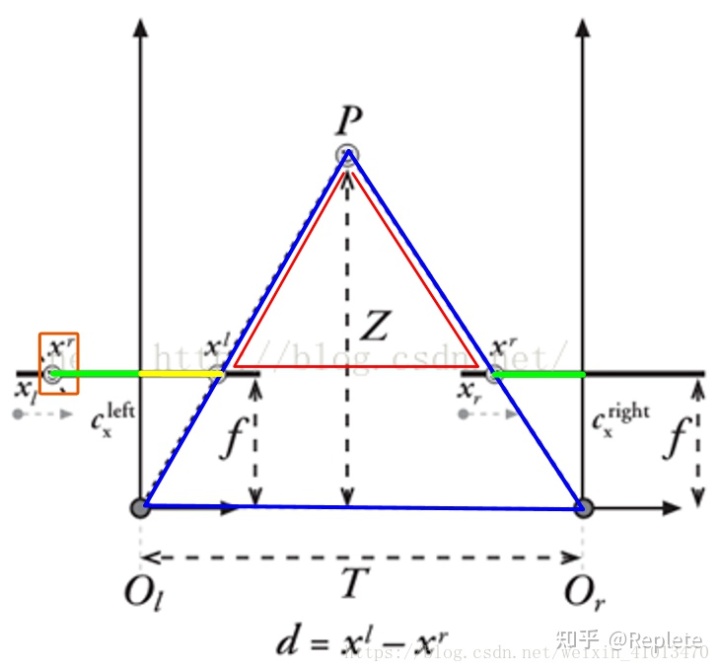
所谓视差,就是指左右图像上的相同特征点在x坐标上的差值,即图中的d,再看一张图
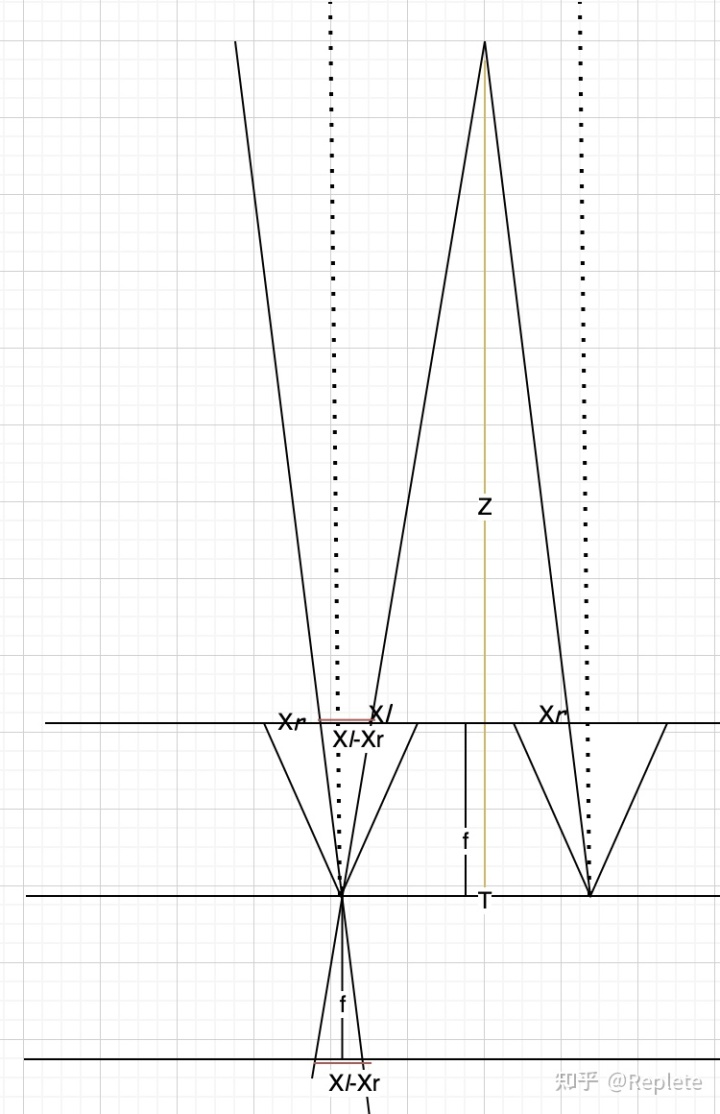
设成像平面宽度为W,Xl到Xr的线段长度为:
T - (黄色线段+绿色线段)= T - (黄色线段(Xl-W/2)+绿色线段(W/2-Xr))
T-((Xl-W/2)+(W/2-Xr)) = T-(Xl-Xr)
黄色线段+绿色线段 = XL-XR 就是视差
红色矩形框内的是Pr点在左边成像平面上的相同位置点,则视差d就很明显了,就等于左边绿色线段与黄色线段之和,这段距离长度是 Xl-Xr,而两条绿色线段等长(很明显吧,两个成像平面一样大,绿色线段是相对称的线段)。
所以利用红色三角形相似于蓝色三角形,红色三角形的底边长就是d,然后就得到了下面的公式

f = 焦距(mm)/像元大小(mm/像素),得到量纲为像素点
视差量纲:像素点
T:基线宽度量纲毫米(mm)
Z:量纲毫米mm
几何推导公式:
Z/T = f/(Xl-Xr)
Z = T*f/(Xl-Xr)
得到深度z的值以后,再选择如下两公式之一计算xy坐标,即可得出目标点的三维坐标:
















 9万+
9万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









