






Ordinary Differential Equation
Import package
import numpy as np
import matplotlib.pyplot as plt
from matplotlib.ticker import MaxNLocator
plt.rc("font", family="Times New Roman")
from tqdm import tqdm
import imageio
from mpl_toolkits.mplot3d import Axes3D
System of ODE
Pendulum
According to Newton’s Second Law:
{
m
l
x
¨
+
m
g
x
=
0
x
(
0
)
=
π
2
x
˙
(
0
)
=
0
\left\{ \begin{array}{c} ml\ddot{x}+mgx=0\\ x\left( 0 \right) =\frac{\pi}{2}\\ \dot{x}\left( 0 \right) =0\\ \end{array} \right.
⎩
⎨
⎧mlx¨+mgx=0x(0)=2πx˙(0)=0
set:
x
1
(
t
)
=
x
,
x
2
(
t
)
=
x
˙
x_1\left( t \right) =x, x_2\left( t \right) =\dot{x}
x1(t)=x,x2(t)=x˙:
{
x
˙
1
=
f
(
t
,
x
1
)
=
x
2
x
1
(
0
)
=
π
2
;
{
x
˙
2
=
f
(
t
,
x
2
)
=
−
g
l
x
1
x
2
(
0
)
=
0
\left\{ \begin{array}{c} \dot{x}_1=f\left( t, x_1 \right) =x_2\\ x_1\left( 0 \right) =\frac{\pi}{2}\\ \end{array}; \left\{ \begin{array}{c} \dot{x}_2=f\left( t, x_2 \right) =-\frac{g}{l}x_1\\ x_2\left( 0 \right) =0\\ \end{array} \right. \right.
{x˙1=f(t,x1)=x2x1(0)=2π;{x˙2=f(t,x2)=−lgx1x2(0)=0
When using the second-order Taylor method, note that:
f
′
(
t
,
x
1
)
=
f
t
+
f
x
1
f
=
f
t
=
x
˙
2
=
−
g
l
x
1
f
′
(
t
,
x
2
)
=
f
t
+
f
x
2
f
=
f
t
=
−
g
l
x
˙
1
=
−
g
l
x
2
f^{\prime}\left( t, x_1 \right) =f_t+f_{x_1}f=f_t=\dot{x}_2=-\frac{g}{l}x_1 \\ f^{\prime}\left( t, x_2 \right) =f_t+f_{x_2}f=f_t=-\frac{g}{l}\dot{x}_1=-\frac{g}{l}x_2
f′(t,x1)=ft+fx1f=ft=x˙2=−lgx1f′(t,x2)=ft+fx2f=ft=−lgx˙1=−lgx2
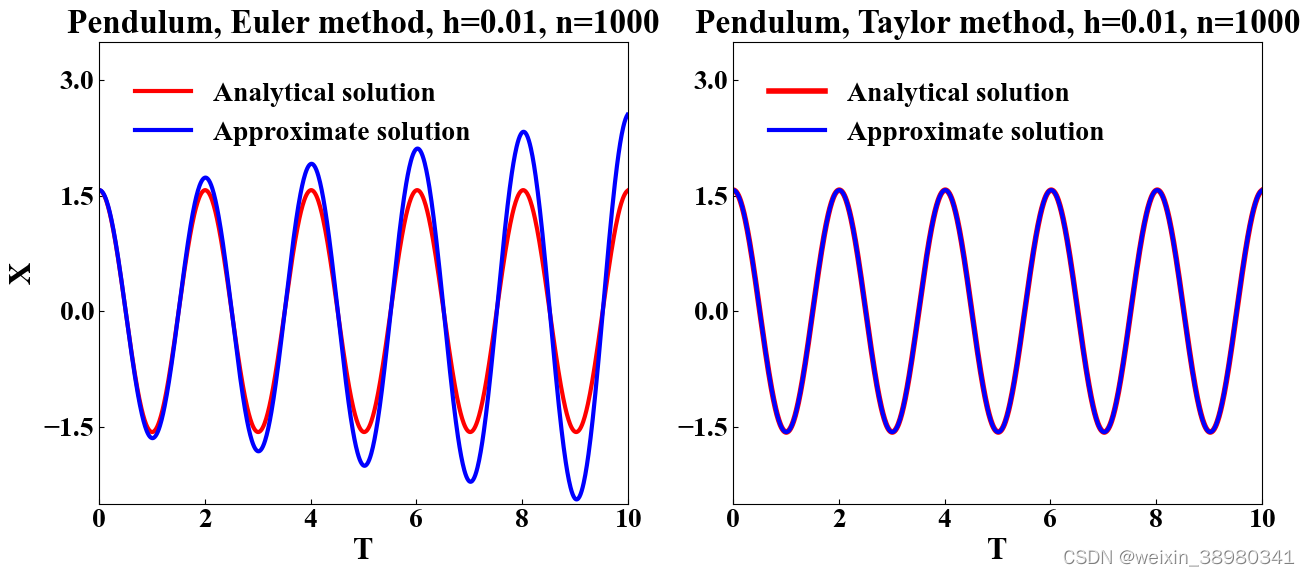
Next, apply the explicit Trapezoidal rule to solve the two ODEs.
g, l = 9.81, 1.0 # g = 9.81 m/s-2, l = 1 m
def real_func(t): # analytical solution : x(t) = pi/2 * cos(wt), w = sqrt(g/l)
return np.pi/2 * np.cos(np.sqrt(g/l) * t)
def SolveODE(y10, y20, step_h=0.01, n=1000): # t from 0 -> 10
omega1 = np.array([0] * (n + 1), dtype=float) # x1 using Euler method
omega2 = np.array([0] * (n + 1), dtype=float) # x2 using Euler method
omega3 = np.array([0] * (n + 1), dtype=float) # x1 using 2-order Taylor method
omega4 = np.array([0] * (n + 1), dtype=float) # x2 using 2-order Taylor method
omega1[0] = y10
omega2[0] = y20
omega3[0] = y10
omega4[0] = y20
for i in range(n):
# Euler method:
omega1[i + 1] = omega1[i] + step_h * omega2[i]
omega2[i + 1] = omega2[i] + step_h * (-g/l * omega1[i])
# 2-order Taylor:
omega3[i + 1] = omega3[i] + step_h * omega4[i] + np.power(step_h, 2)/2 * (-g/l * omega3[i])
omega4[i + 1] = omega4[i] + step_h * (-g/l * omega3[i]) + np.power(step_h, 2)/2 * (-g/l * omega4[i])
return omega1, omega2, omega3, omega4
t = np.linspace(0, 10, 1001)
x = real_func(t)
ret_euler, _, ret_taylor, _ = SolveODE(y10=np.pi/2, y20=0)
# plot:
plt.rcParams['xtick.direction'] = "in" # ticks direction
plt.rcParams['ytick.direction'] = "in"
plt.figure(figsize=(15, 6))
plt.subplot(1, 2, 1)
axes=plt.gca()
axes.yaxis.set_major_locator(MaxNLocator(5)) # ticks num
axes.xaxis.set_major_locator(MaxNLocator(5))
plt.axis([0, 10, -2.5, 3.5]) # ticks range (xinf, xsup, yinf, ysup)
plt.xticks(fontsize=20, fontweight="bold") # ticks font
plt.yticks(fontsize=20, fontweight="bold")
plt.xlabel("T", fontsize=22, fontweight="bold")
plt.ylabel("X", fontsize=22, fontweight="bold")
plt.title("Pendulum, Euler method, h=0.01, n=1000", fontsize=24, fontweight="bold")
plt.plot(t, x, color="red", linewidth=3, label="Analytical solution")
plt.plot(t, ret_euler, color="blue", linewidth=3, label="Approximate solution")
# set legend:
legend_font = {
"family": "Times New Roman",
"style" : "normal",
"size" : 20,
'weight': "bold"
}
plt.legend(
bbox_to_anchor=(0.75, .72), loc="lower right",
frameon=False, prop=legend_font
)
plt.subplot(1, 2, 2)
axes=plt.gca()
axes.yaxis.set_major_locator(MaxNLocator(5)) # ticks num
axes.xaxis.set_major_locator(MaxNLocator(5))
plt.axis([0, 10, -2.5, 3.5]) # ticks range (xinf, xsup, yinf, ysup)
plt.xticks(fontsize=20, fontweight="bold") # ticks font
plt.yticks(fontsize=20, fontweight="bold")
plt.xlabel("T", fontsize=22, fontweight="bold")
plt.title("Pendulum, Taylor method, h=0.01, n=1000", fontsize=24, fontweight="bold")
plt.plot(t, x, color="red", linewidth=4, label="Analytical solution")
plt.plot(t, ret_taylor, color="blue", linewidth=3, label="Approximate solution")
# set legend:
legend_font = {
"family": "Times New Roman",
"style" : "normal",
"size" : 20,
'weight': "bold"
}
plt.legend(
bbox_to_anchor=(0.75, .72), loc="lower right",
frameon=False, prop=legend_font
)
plt.show()
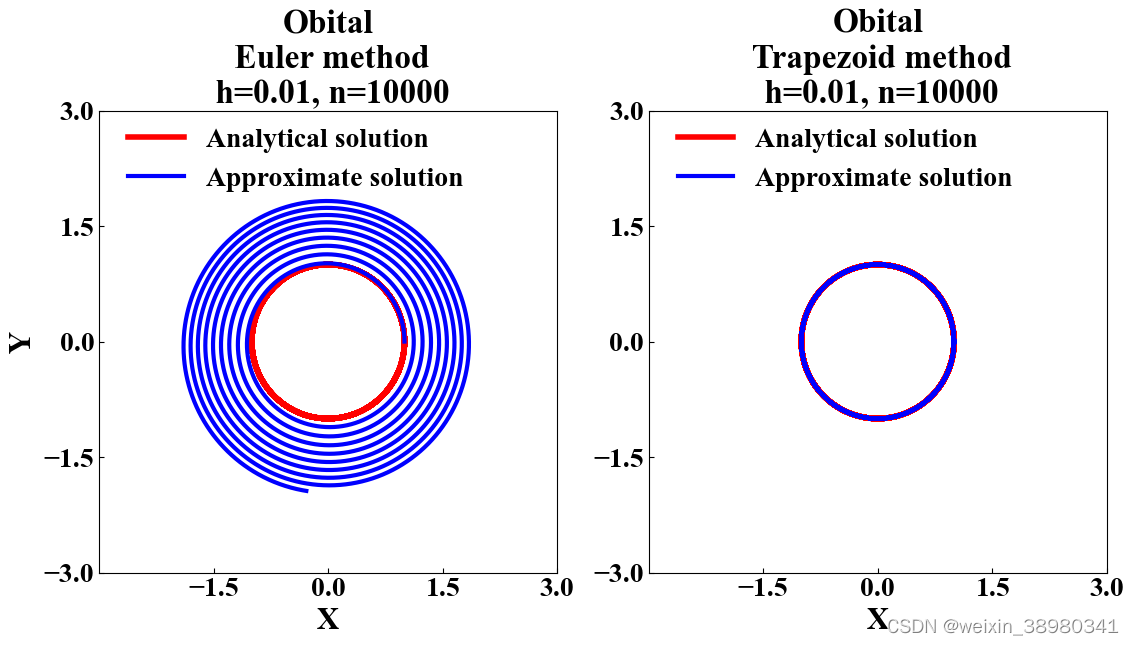
Orbital mechanics
Assuming that the star is at the origin, the Equations of motion of the planet located
(
x
,
y
)
(x,y)
(x,y) (only considering the
X
O
Y
XOY
XOY plane) subject to universal gravitation is:
m
1
x
¨
=
−
G
m
1
m
2
x
(
x
2
+
y
2
)
3
/
2
m_1\ddot{x}=-\frac{Gm_1m_2x}{\left( x^2+y^2 \right) ^{3/2}}
m1x¨=−(x2+y2)3/2Gm1m2x
m
1
y
¨
=
−
G
m
1
m
2
y
(
x
2
+
y
2
)
3
/
2
m_1\ddot{y}=-\frac{Gm_1m_2y}{\left( x^2+y^2 \right) ^{3/2}}
m1y¨=−(x2+y2)3/2Gm1m2y
which can be transformed into four first order differential equations:
x
˙
=
v
x
;
x
(
0
)
=
1
\dot{x}=v_x; x\left( 0 \right) =1
x˙=vx;x(0)=1
v
˙
x
=
−
G
m
2
x
(
x
2
+
y
2
)
3
/
2
;
v
x
(
0
)
=
0
\dot{v}_x=-\frac{Gm_2x}{\left( x^2+y^2 \right) ^{3/2}}; v_x\left( 0 \right) =0
v˙x=−(x2+y2)3/2Gm2x;vx(0)=0
y
˙
=
v
y
;
y
(
0
)
=
0
\dot{y}=v_y; y\left( 0 \right) =0
y˙=vy;y(0)=0
v
˙
y
=
−
G
m
2
y
(
x
2
+
y
2
)
3
/
2
;
v
y
(
0
)
=
1
\dot{v}_y=-\frac{Gm_2y}{\left( x^2+y^2 \right) ^{3/2}}; v_y\left( 0 \right) =1
v˙y=−(x2+y2)3/2Gm2y;vy(0)=1
Gm = 1.0
def real_x(t):
return np.cos(t)
def real_y(t):
return np.sin(t)
def EulerSolveODE(x0, vx0, y0, vy0, step_h=0.01, n=10000): # solve ODE by Euler method, t from 0 -> 100
omega1 = np.array([0] * (n + 1), dtype=float) # x
omega2 = np.array([0] * (n + 1), dtype=float) # vx
omega3 = np.array([0] * (n + 1), dtype=float) # y
omega4 = np.array([0] * (n + 1), dtype=float) # vy
omega1[0] = x0
omega2[0] = vx0
omega3[0] = y0
omega4[0] = vy0
for i in range(n):
omega1[i + 1] = omega1[i] + step_h * omega2[i]
omega2[i + 1] = omega2[i] + step_h * ((-Gm * omega1[i])/np.power((np.power(omega1[i], 2) + np.power(omega3[i], 2)), 3/2))
omega3[i + 1] = omega3[i] + step_h * omega4[i]
omega4[i + 1] = omega4[i] + step_h * ((-Gm * omega3[i])/np.power((np.power(omega1[i], 2) + np.power(omega3[i], 2)), 3/2))
return omega1, omega2, omega3, omega4
def TrapezoidSolveODE(x0, vx0, y0, vy0, step_h=0.01, n=10000): # solve ODE by Euler method, t from 0 -> 100
omega1 = np.array([0] * (n + 1), dtype=float) # x
omega2 = np.array([0] * (n + 1), dtype=float) # vx
omega3 = np.array([0] * (n + 1), dtype=float) # y
omega4 = np.array([0] * (n + 1), dtype=float) # vy
omega1[0] = x0
omega2[0] = vx0
omega3[0] = y0
omega4[0] = vy0
for i in range(n):
# pre-calculation using Euler method
omega1[i + 1] = omega1[i] + step_h * omega2[i]
omega2[i + 1] = omega2[i] + step_h * ((-Gm * omega1[i])/np.power((np.power(omega1[i], 2) + np.power(omega3[i], 2)), 3/2))
omega3[i + 1] = omega3[i] + step_h * omega4[i]
omega4[i + 1] = omega4[i] + step_h * ((-Gm * omega3[i])/np.power((np.power(omega1[i], 2) + np.power(omega3[i], 2)), 3/2))
# calculation using trapezoid method
omega1[i + 1] = omega1[i] + step_h/2 * (omega2[i] + omega2[i + 1])
omega2[i + 1] = omega2[i] + step_h/2 * ((-Gm * omega1[i])/np.power((np.power(omega1[i], 2) + np.power(omega3[i], 2)), 3/2) + (-Gm * omega1[i + 1])/np.power((np.power(omega1[i + 1], 2) + np.power(omega3[i + 1], 2)), 3/2))
omega3[i + 1] = omega3[i] + step_h/2 * (omega4[i]+ omega4[i + 1])
omega4[i + 1] = omega4[i] + step_h/2 * ((-Gm * omega3[i])/np.power((np.power(omega1[i], 2) + np.power(omega3[i], 2)), 3/2) + (-Gm * omega3[i + 1])/np.power((np.power(omega1[i + 1], 2) + np.power(omega3[i + 1], 2)), 3/2))
return omega1, omega2, omega3, omega4
t = np.linspace(0, 100, 10001)
r_x = real_x(t)
r_y = real_y(t)
euler_x, _, euler_y ,_ = EulerSolveODE(x0=1.0, vx0=0.0, y0=0.0, vy0=1.0)
trap_x, _, trap_y ,_ = TrapezoidSolveODE(x0=1.0, vx0=0.0, y0=0.0, vy0=1.0)
# plot:
plt.rcParams['xtick.direction'] = "in" # ticks direction
plt.rcParams['ytick.direction'] = "in"
plt.figure(figsize=(13, 6))
plt.subplot(1, 2, 1)
axes=plt.gca()
axes.yaxis.set_major_locator(MaxNLocator(5)) # ticks num
axes.xaxis.set_major_locator(MaxNLocator(5))
plt.axis([-3 + 0.0001, 3, -3, 3]) # ticks range (xinf, xsup, yinf, ysup)
plt.xticks(fontsize=20, fontweight="bold") # ticks font
plt.yticks(fontsize=20, fontweight="bold")
plt.xlabel("X", fontsize=22, fontweight="bold")
plt.ylabel("Y", fontsize=22, fontweight="bold")
plt.title("Obital\n Euler method\n h=0.01, n=10000", fontsize=24, fontweight="bold")
plt.plot(r_x, r_y, color="red", linewidth=4, label="Analytical solution")
plt.plot(euler_x, euler_y, color="blue", linewidth=3, label="Approximate solution")
# set legend:
legend_font = {
"family": "Times New Roman",
"style" : "normal",
"size" : 20,
'weight': "bold"
}
plt.legend(
bbox_to_anchor=(0.85, .77), loc="lower right",
frameon=False, prop=legend_font
)
plt.subplot(1, 2, 2)
axes=plt.gca()
axes.yaxis.set_major_locator(MaxNLocator(5)) # ticks num
axes.xaxis.set_major_locator(MaxNLocator(5))
plt.axis([-3 + 0.0001, 3, -3, 3]) # ticks range (xinf, xsup, yinf, ysup)
plt.xticks(fontsize=20, fontweight="bold") # ticks font
plt.yticks(fontsize=20, fontweight="bold")
plt.xlabel("X", fontsize=22, fontweight="bold")
plt.title("Obital\n Trapezoid method\n h=0.01, n=10000", fontsize=24, fontweight="bold")
plt.plot(r_x, r_y, color="red", linewidth=4, label="Analytical solution")
plt.plot(trap_x, trap_y, color="blue", linewidth=3, label="Approximate solution")
# set legend:
legend_font = {
"family": "Times New Roman",
"style" : "normal",
"size" : 20,
'weight': "bold"
}
plt.legend(
bbox_to_anchor=(0.85, .77), loc="lower right",
frameon=False, prop=legend_font
)
plt.show()
Three-body motion
V
e
l
o
c
i
t
y
−
V
e
l
e
r
t
A
l
g
o
r
i
t
h
m
Velocity-Velert\ Algorithm
Velocity−Velert Algorithm:
x
(
t
+
Δ
t
)
=
x
(
t
)
+
v
x
(
t
)
Δ
t
+
1
2
a
x
(
t
)
(
Δ
t
)
2
x\left( t+\varDelta t \right) =x\left( t \right) +v_x\left( t \right) \varDelta t+\frac{1}{2}a_x\left( t \right) \left( \varDelta t \right) ^2
x(t+Δt)=x(t)+vx(t)Δt+21ax(t)(Δt)2
v
x
(
t
+
Δ
t
2
)
=
v
x
(
t
)
+
1
2
a
x
(
t
)
Δ
t
v_x\left( t+\frac{\varDelta t}{2} \right) =v_x\left( t \right) +\frac{1}{2}a_x\left( t \right) \varDelta t
vx(t+2Δt)=vx(t)+21ax(t)Δt
v
x
(
t
+
Δ
t
)
=
v
x
(
t
+
Δ
t
2
)
+
1
2
a
x
(
t
+
Δ
t
)
Δ
t
v_x\left( t+\varDelta t \right) =v_x\left( t+\frac{\varDelta t}{2} \right) +\frac{1}{2}a_x\left( t+\varDelta t \right) \varDelta t
vx(t+Δt)=vx(t+2Δt)+21ax(t+Δt)Δt
a
x
,
i
(
t
)
=
∑
i
≠
j
G
m
j
R
i
j
3
(
x
j
−
x
i
)
a_{x, i}\left( t \right) =\sum_{i\ne j}{\frac{Gm_j}{R_{ij}^{3}}\left( x_j-x_i \right)}
ax,i(t)=i=j∑Rij3Gmj(xj−xi)
Reference: https://www.guanjihuan.com/archives/858
config = {
"G" : 1.0, # gravitational constant
"N_steps" : 1e5, # total step for motion
"time_step" : 0.05, # time step
"observation_max" : 100, # field of view when visualize the motion
"out_frame" : 1000, # save image per $out_frame$ steps
"root" : "./three-body/"
}
class Ball:
def __init__(self, m, x0=0, y0=0, vx0=0, vy0=0):
self.mass = m # mass
self.x, self.y = np.array([x0], dtype=float), np.array([y0], dtype=float) # initial position
self.vx, self.vy = np.array([vx0], dtype=float), np.array([vy0], dtype=float) # initial velocity
self.ax, self.ay = 0.0, 0.0 # acceleration
def distance(self, other, step): # distance between two ball at this step
return np.sqrt(np.power(self.x[step] - other.x[step], 2) + np.power(self.y[step] - other.y[step], 2))
def CalculateAcceleration(self, others, step): # acceleration at this step
if type(others) == list: # many body question
self.ax, self.ay = 0.0, 0.0
for other in others:
if self.distance(other, step) != 0:
self.ax += config["G"] * other.mass * (other.x[step] - self.x[step])/np.power(self.distance(other, step), 3)
self.ay += config["G"] * other.mass * (other.y[step] - self.y[step])/np.power(self.distance(other, step), 3)
else: # monomer problem
self.ax = config["G"] * other.mass * (other.x - self.x)/np.power(self.distance(other, step), 3)
self.ay = config["G"] * other.mass * (other.y - self.y)/np.power(self.distance(other, step), 3)
def VelocityVerlert(ball_list, step, delta_t):
for ball in ball_list: # update coordinate
ball.x[step + 1] = ball.x[step] + ball.vx[step] * delta_t + 0.5 * ball.ax * np.power(delta_t, 2)
ball.y[step + 1] = ball.y[step] + ball.vy[step] * delta_t + 0.5 * ball.ay * np.power(delta_t, 2)
ball.vx[step + 1] = ball.vx[step] + 0.5 * ball.ax * delta_t # v(t + delta_t/2)
ball.vy[step + 1] = ball.vy[step] + 0.5 * ball.ay * delta_t
for ball in ball_list: # updata velocity
ball.CalculateAcceleration(ball_list, step + 1)
ball.vx[step + 1] = ball.vx[step + 1] + 0.5 * ball.ax * delta_t # real v(t + delta_t)
ball.vy[step + 1] = ball.vy[step + 1] + 0.5 * ball.ay * delta_t
# set balls
ball1 = Ball(m=15, x0=300, y0=50, vx0=0, vy0=0)
ball2 = Ball(m=12, x0=-100, y0=-200, vx0=0, vy0=0)
ball3 = Ball(m=8, x0=-100, y0=150, vx0=0, vy0=0)
ball_list = [ball1, ball2, ball3]
# motion simulation
print("start simulation")
for ball in ball_list: # initialization
ball.x = np.append(ball.x, [0] * int(config["N_steps"] + 1 - len(ball.x)))
ball.y = np.append(ball.y, [0] * int(config["N_steps"] + 1 - len(ball.y)))
ball.vx = np.append(ball.vx, [0] * int(config["N_steps"] + 1 - len(ball.vx)))
ball.vy = np.append(ball.vy, [0] * int(config["N_steps"] + 1 - len(ball.vy)))
ball.CalculateAcceleration(ball_list, 0)
for i in tqdm(range(int(config["N_steps"]))):
VelocityVerlert(ball_list=ball_list, step=i, delta_t=config["time_step"])
print("simulation done!")
print("processing visualization")
all_images = []
for i in range(int(config["N_steps"]) + 1):
axis_x = np.mean([ball.x[i] for ball in ball_list]) # coordinate center is fixed at the average coordinate
axis_y = np.mean([ball.y[i] for ball in ball_list])
while True:
if np.max([np.fabs(ball.x[i] - axis_x) for ball in ball_list]) > config["observation_max"] or np.max([np.fabs(ball.y[i] - axis_y) for ball in ball_list]) > config["observation_max"]:
config["observation_max"] *= 2 # expand the scope of vision
elif np.max([np.fabs(ball.x[i] - axis_x) for ball in ball_list]) < config["observation_max"]/10 and np.max([np.fabs(ball.y[i] - axis_y) for ball in ball_list]) < config["observation_max"]/10:
config["observation_max"] /= 2 # narrow the scope of vision
else:
break
if i % config["out_frame"] == 0:
plt.rcParams['xtick.direction'] = "in" # ticks direction
plt.rcParams['ytick.direction'] = "in"
axes=plt.gca()
axes.yaxis.set_major_locator(MaxNLocator(5)) # ticks num
axes.xaxis.set_major_locator(MaxNLocator(5))
plt.axis([axis_x-config["observation_max"], axis_x + config["observation_max"], axis_y - config["observation_max"], axis_y + config["observation_max"]])
plt.xticks(fontsize=20, fontweight="bold") # ticks font
plt.yticks(fontsize=20, fontweight="bold")
plt.title("Three-body motion", fontsize=24, fontweight="bold")
plt.plot(ball_list[0].x[i], ball_list[0].y[i], "og", markersize=ball_list[0].mass*100/config["observation_max"]) # the larger the mass, the larger the sphere area
plt.plot(ball_list[1].x[i], ball_list[1].y[i], "or", markersize=ball_list[1].mass*100/config["observation_max"])
plt.plot(ball_list[2].x[i], ball_list[2].y[i], "ob", markersize=ball_list[2].mass*100/config["observation_max"])
if i != 0:
plt.plot(ball_list[0].x[:i], ball_list[0].y[:i], "-g")
plt.plot(ball_list[1].x[:i], ball_list[1].y[:i], "-r")
plt.plot(ball_list[2].x[:i], ball_list[2].y[:i], "-b")
file_name = config["root"] + str(i)+".jpg"
all_images.append(file_name)
plt.savefig(file_name)
print("image saved as {}".format(file_name))
plt.clf()
# creat gif:
gif_frames = []
for file_name in all_images:
gif_frames.append(imageio.imread(file_name))
imageio.mimsave(config["root"] + "three-body motion.gif", gif_frames, fps=10) # larger fps to get larger amination speed
print("three-body motion.gif has been saved!")
start simulation
100%|██████████| 100000/100000 [00:14<00:00, 6717.22it/s]
simulation done!
processing visualization
image saved as ./three-body/0.jpg
image saved as ./three-body/1000.jpg
image saved as ./three-body/2000.jpg
image saved as ./three-body/3000.jpg
image saved as ./three-body/4000.jpg
image saved as ./three-body/5000.jpg
image saved as ./three-body/6000.jpg
image saved as ./three-body/7000.jpg
image saved as ./three-body/8000.jpg
image saved as ./three-body/9000.jpg
image saved as ./three-body/10000.jpg
image saved as ./three-body/11000.jpg
image saved as ./three-body/12000.jpg
image saved as ./three-body/13000.jpg
image saved as ./three-body/14000.jpg
image saved as ./three-body/15000.jpg
image saved as ./three-body/16000.jpg
image saved as ./three-body/17000.jpg
image saved as ./three-body/18000.jpg
image saved as ./three-body/19000.jpg
image saved as ./three-body/20000.jpg
image saved as ./three-body/21000.jpg
image saved as ./three-body/22000.jpg
…
image saved as ./three-body/97000.jpg
image saved as ./three-body/98000.jpg
image saved as ./three-body/99000.jpg
image saved as ./three-body/100000.jpg















 809
809











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









