







https://www.cnblogs.com/tomatokely/p/16392997.html
陀螺仪芯片厂家: ST ICM42605, MPU 6050, Murata SCL3300/3400
陀螺仪可选量程:± 15.6/31.2/62.5/125/250/500/1000/2000 dps
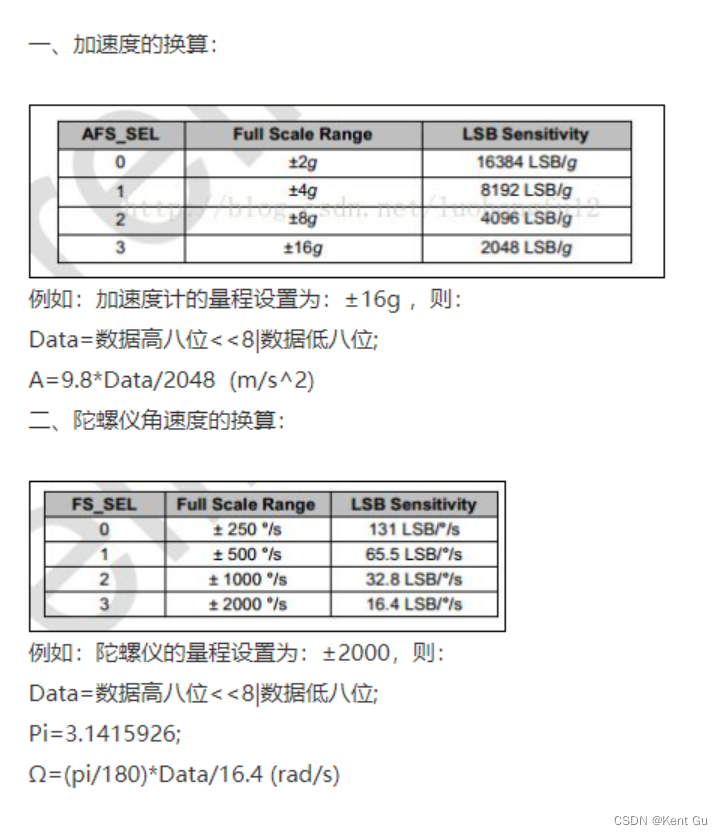
加速度可选量程:± 2/4/8/16 g
计算单位:
陀螺仪:角速度=速度*时间。单位:dps 度每秒。
加速度计:静止状态,重力加速度=1g≈9.8 米/平方秒。
表示:
gx gy gz 代表陀螺仪在x,y,z轴上的分量
ax ay az 代表加速度计在x,y,z轴上的分量
传感器包含三轴加速度计和三轴陀螺仪数据,每个轴用 2 KB表示,例如加速度x轴:
A_XSENSOR&0XFF 取低八位
A_XSENSOR>>8 取高八位
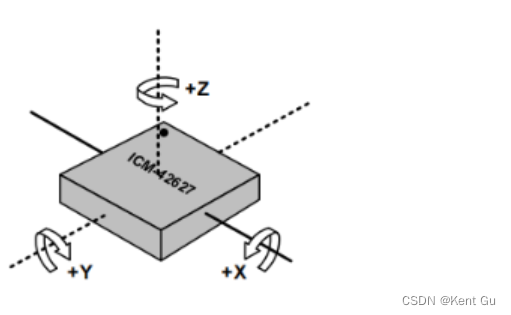
坐标轴:以笛卡尔右手坐标系为准
横滚角 Roll:飞机右滚为正。绕z轴旋转。
俯仰角 Pitch:飞机抬头为正。绕x轴旋转。
偏航角 Yaw:实际航向与计划航向之间的夹角,向右偏为正。绕y轴旋转。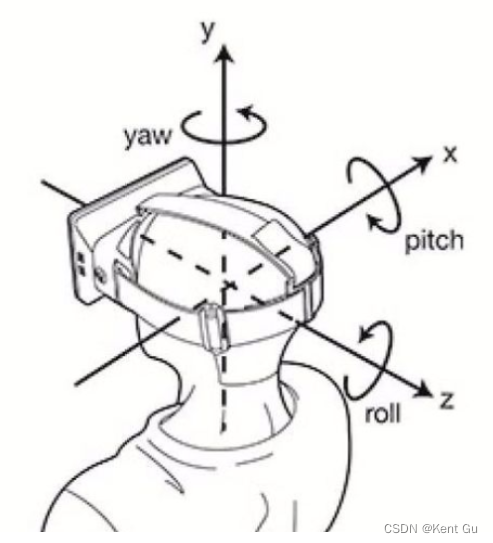
计算单位:
陀螺仪:角速度=速度*时间。单位:dps 度每秒。
加速度计:静止状态,重力加速度=1g≈9.8 米/平方秒。
表示:
gx gy gz 代表陀螺仪在x,y,z轴上的分量
ax ay az 代表加速度计在x,y,z轴上的分量
传感器包含三轴加速度计和三轴陀螺仪数据,每个轴用 2 KB表示,例如加速度x轴:
A_XSENSOR&0XFF 取低八位
A_XSENSOR>>8 取高八位
坐标轴:以笛卡尔右手坐标系为准
横滚角 Roll:飞机右滚为正。绕z轴旋转。
俯仰角 Pitch:飞机抬头为正。绕x轴旋转。
偏航角 Yaw:实际航向与计划航向之间的夹角,向右偏为正。绕y轴旋转。
计算单位:
陀螺仪:角速度=速度*时间。单位:dps 度每秒。
加速度计:静止状态,重力加速度=1g≈9.8 米/平方秒。
表示:
gx gy gz 代表陀螺仪在x,y,z轴上的分量
ax ay az 代表加速度计在x,y,z轴上的分量
传感器包含三轴加速度计和三轴陀螺仪数据,每个轴用 2 KB表示,例如加速度x轴:
A_XSENSOR&0XFF 取低八位
A_XSENSOR>>8 取高八位
坐标轴:以笛卡尔右手坐标系为准
横滚角 Roll:飞机右滚为正。绕z轴旋转。
俯仰角 Pitch:飞机抬头为正。绕x轴旋转。
偏航角 Yaw:实际航向与计划航向之间的夹角,向右偏为正。绕y轴旋转。
俯仰角:θ=arctan(-Ax/sqrt(Ay2+Az2))
只用陀螺仪做姿态解算

陀螺仪输出到姿态角速度的转换矩阵=[1, sin(phi)*tan(theta), cos(phi)*tan(theta);
0, cos(phi), -sin(phi);
0, sin(phi)*sec(theta), cos(phi)*sec(theta)];
平台:matlab,其中phi表示重力加速度与X-Z平面夹角,theta表示重力加速度与Y-Z平面夹角。
陀螺仪各轴输出为:gyro = [gx gy gz]’ ;
姿态角速度算法:[横滚角速度,俯仰角速度,偏航角速度]’ = trans * gryo;
姿态角(循环里累计角度变化):attitude_gyro = attitude_gyro + trans * gyro .* dt ;

















 710
710

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









